
VEXcode EXP 4.0 引入了一系列新功能。 此次重大更新重点关注提高机器人编码的生产力和可访问性。 请参阅下文,了解 VEXcode EXP 4.0 有哪些新功能!
点击此处下载 VEXcode EXP 4.0 的新安装程序!
CTE 工作单元
VEXcode EXP 现在完全支持 CTE Workcell。 CTE Workcell 通过实践活动向学生介绍工业机器人和自动化的世界。
在 VEXcode EXP 中,6 轴机械臂可以直接连接
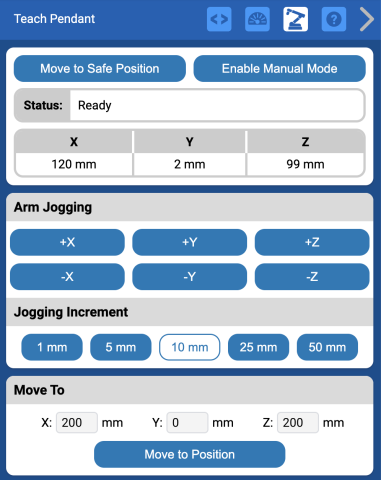
计算机,而无需 EXP Brain 来访问 示教器
示教器是用于控制和编程机械臂及其他工业自动化机械的设备,包括按钮或触摸屏,允许操作员手动引导机器人的运动。
将 轴机械臂连接到 EXP Brain 还允许您将新设备集成到您的 CTE 项目中,例如 CTE 气动系统信号塔和 物体传感器。
点击此处了解有关 CTE Workcell 的更多信息以及如何在课堂上使用。
开关块
现在可以使用新的 Switch Blocks,从而实现从基于块的编码到基于文本的编程的无缝过渡。
拖放开关块: 所有开关块都可以从工具箱中拖出并直接输入。
将 Python 直接输入到块项目中: VEXcode 允许您将 Python 命令直接合并到您的项目中,并将它们与其他块无缝集成。 为了帮助您编写正确的代码,VEXcode 还提供了 Python 命令的自动完成功能。
代码转换: 只需单击即可将整个块堆栈转换为 Python。
此功能非常适合希望从区块过渡到文本的学习者。 有关使用 Switch Blocks 进行编码的更多信息,请点击此处
在基于 Web 的 VEXcode 中保存和加载
文件菜单的其他更改:
- 从您的 设备 加载现已更改为打开。
- 保存到您的设备 现已更改为另存为。
- 您现在还可以使用 保存 按钮手动保存。
有关如何在 Chrome 浏览器上加载和保存 VEXcode EXP 项目的分步指南,请点击此处。
更新的 AI 视觉传感器检测
AI 视觉传感器现在能够检测 AprilTags 和 AI 分类。
AprilTags 是可检测且具有唯一 ID 的图像。 它们可以被打印出来并用于机器人现场使用。 在此处下载可打印的 AprilTag
人工智能视觉传感器还可以识别 VEX EXP 教室捆绑包中不同颜色的巴基球和环。
点击此处了解如何在 块Python C++中使用 AI 视觉传感器。
大声朗读区块
现在只需单击鼠标右键即可大声读出 VEXcode EXP 4.0 内的所有块。
除 Android 外,所有设备均可使用此功能。
- 可定制的声音: 从各种声音中选择,并在新工具菜单中调整速度和音调。
- 上下文菜单集成: 右键单击任意块即可听到其大声朗读。
点击此处获取有关如何使用 VEXcode 中的读取功能的分步说明。
工具菜单
VEXcode EXP 4.0 的新工具菜单充满了提高生产力和可访问性的功能。
键盘快捷键
有新的键盘快捷键可用于启动、停止和打开帮助文档。
| 苹果 | 视窗 |
高对比度主题
高对比度主题增强了文本和背景之间的区别,使得视力低下、色盲或其他视力障碍的用户更容易阅读内容。
| 默认 | 高对比度 |
语音设置
使用新的“阅读块”功能,您可以从此菜单中更改使用的声音、语速和音调。
API 文档
访问全面的 API 文档,让您比以往更轻松地探索和充分利用 VEX EXP 机器人的潜力。
基于网络的无线项目下载
基于网络的 VEXcode EXP 现在能够通过 EXP 控制器无线连接到 EXP Brain。