
VEXcode EXP 4.0에는 다양한 새로운 기능이 도입되었습니다. 이 주요 업데이트는 로봇 코딩의 생산성과 접근성을 향상시키는 데 중점을 두고 있습니다. VEXcode EXP 4.0에서 어떤 새로운 기능을 사용할 수 있는지 아래에서 알아보세요!
여기를 클릭하여 VEXcode EXP 4.0의 새로운 설치 프로그램을 다운로드하세요!
CTE 워크셀
VEXcode EXP는 이제 CTE Workcell을 완벽하게 지원합니다. CTE 워크셀은 실습 활동을 통해 학생들에게 산업용 로봇과 자동화의 세계를 소개합니다. 아래 애니메이션을 시청하면 컨베이어 벨트, 6축 로봇 팔, 다양한 센서를 사용하여 CTE Workcell로 구축된 프로젝트의 예를 볼 수 있습니다.
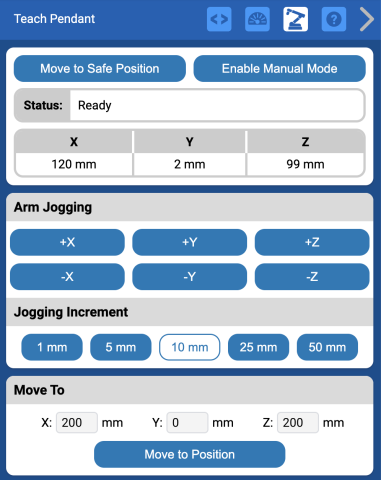
VEXcode EXP에서는 6축 로봇팔을 EXP 브레인 없이도 컴퓨터에 직접 연결하여 티치 펜던트에 액세스할 수 있습니다.
티치 펜던트는 산업 자동화를 위한 로봇팔과 기타 기계를 제어하고 프로그래밍하는 데 사용되는 장치로, 작업자가 로봇의 움직임을 수동으로 안내할 수 있도록 하는 버튼이나 터치 스크린이 포함되어 있습니다.
6축 로봇 팔을 EXP Brain에 연결하면 CTE 공압 시스템, 신호 타워, 객체 센서와 같은 새로운 장치를 CTE 프로젝트에 통합할 수도 있습니다.
CTE 워크셀에 대한 자세한 내용과 교실에서의 사용 방법은 여기를 클릭하여 알아보세요.
스위치 블록
새로운 스위치 블록이 출시되어 블록 기반 코딩에서 텍스트 기반 프로그래밍으로의 전환이 매끄럽게 이루어집니다.
드래그 앤 드롭 스위치 블록: 모든 스위치 블록은 도구 상자에서 드래그하여 직접 입력할 수 있습니다.
블록 프로젝트에 Python을 직접 입력하세요: VEXcode를 사용하면 Python 명령을 프로젝트에 직접 통합하여 다른 블록과 원활하게 통합할 수 있습니다. 올바른 코드를 작성할 수 있도록 VEXcode는 Python 명령에 대한 자동완성 기능도 제공합니다.
코드 변환: 한 번의 클릭으로 전체 블록 스택을 Python으로 변환합니다.
이 기능은 블록에서 텍스트로 넘어가려는 학습자에게 적합합니다. Switch Blocks로 코딩하는 것에 대한 자세한 내용은 여기를 참조하세요.
웹 기반 VEX코드에서 저장 및 로드
파일 메뉴의 기타 변경 사항:
- 장치에서 로드 이 이제열기로 변경되었습니다.
- 기기에 저장 이 이제다른 이름으로 저장으로 변경되었습니다.
- 이제 저장 버튼을 사용하여 수동으로 저장할 수도 있습니다.
Chrome 브라우저에서 VEXcode EXP 프로젝트를 로드하고 저장하는 방법에 대한 단계별 가이드는 여기를 참조하세요.
업데이트된 AI 비전 센서 감지
AI 비전 센서는 이제 AprilTags와 AI 분류를 감지할 수 있습니다.
AprilTags는 감지 가능하고 고유한 ID를 갖는 이미지입니다. 이를 인쇄하여 현장에서 로봇에 사용할 수도 있습니다. 인쇄 가능한 AprilTag PDF를 여기에서 다운로드하세요.
AI 비전 센서는 또한 VEX EXP 교실 번들에서 다양한 색상의 버키볼과 링을 식별할 수 있습니다.
여기를 클릭하여 블록, Python, C++에서 AI 비전 센서를 사용하는 방법을 알아보세요.
블록을 소리내어 읽어보세요
VEXcode EXP 4.0 내부의 모든 블록을 이제 간단히 마우스 오른쪽 버튼을 클릭해서 큰소리로 읽을 수 있습니다.
이 기능은 Android를 제외한 모든 기기에서 사용할 수 있습니다.
- 사용자 정의 음성: 새로운 도구 메뉴에서 다양한 음성을 선택하고 속도와 피치를 조정하세요.
- 컨텍스트 메뉴 통합: 블록을 마우스 오른쪽 버튼으로 클릭하면 소리내어 읽힙니다.
VEXcode의 읽기 기능을 사용하는 방법에 대한 단계별 지침은 여기를 참조하세요.
도구 메뉴
VEXcode EXP 4.0의 새로운 도구 메뉴에는 생산성과 접근성을 위한 기능이 가득 담겨 있습니다.
키보드 단축키
도움말 문서를 시작, 중지, 열기 위한 새로운 키보드 단축키가 추가되었습니다.
| 스코틀랜드 사람 | 윈도우 |
고대비 테마
고대비 테마는 텍스트와 배경의 구분을 높여서 시력이 약하거나 색맹 또는 기타 시각 장애가 있는 사용자가 콘텐츠를 더 쉽게 읽을 수 있도록 합니다.
| 기본 | 높은 대비 |
음성 설정
새로운 읽기 블록 기능을 사용하면 이 메뉴에서 사용되는 음성, 말하기 속도 및 피치를 변경할 수 있습니다.
API 문서
포괄적인 API 문서에 접근하면 그 어느 때보다 더 쉽게 VEX EXP 로봇의 모든 잠재력을 탐색하고 활용할 수 있습니다.
여기를 클릭하여 공식 VEX API 참조 사이트에 접속하세요.
웹 기반 무선 프로젝트 다운로드
웹 기반 VEXcode EXP는 이제 EXP 컨트롤러를 통해 EXP Brain에 무선으로 연결할 수 있습니다.