
VEXcode EXP 4.0 では、さまざまな新機能が導入されています。 このメジャーアップデートは、ロボットコーディングの生産性とアクセシビリティの向上に重点を置いています。 VEXcode EXP 4.0 で利用できる新機能について詳しくは、以下をお読みください。
VEXcode EXP 4.0 の新しいインストーラーをダウンロードするには、ここをクリックしてください。
CTEワークセル
VEXcode EXP は CTE ワークセルを完全にサポートするようになりました。 CTE ワークセルは、実践的なアクティビティを通じて、学生に産業用ロボットと自動化の世界を紹介します。 以下のアニメーションをご覧になり、コンベア ベルト、6 軸ロボット アーム、およびさまざまなセンサーを使用して CTE ワークセルで構築されたプロジェクトの例を確認してください。
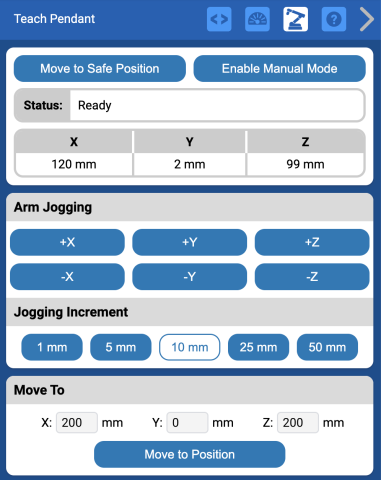
VEXcode EXP では、6 軸ロボット アームを EXP ブレインなしでコンピューターに直接接続し、 ティーチ ペンダント
ペンダントは、産業オートメーション用のロボット アームやその他の機械を制御およびプログラムするために使用されるデバイスで、オペレーターがロボットの動きを手動でガイドできるようにするボタンまたはタッチ スクリーンが含まれています。
6 軸ロボット アームを EXP ブレインに接続すると、 CTE 空気圧システム、 信号タワー、 オブジェクト センサーなどの新しいデバイスを CTE プロジェクトに統合することもできます。
CTE ワークセルとそれを教室で使用する方法の詳細については、こちらをご覧ください。
スイッチブロック
新しいスイッチ ブロックが利用可能になり、ブロックベースのコーディングからテキストベースのプログラミングへのシームレスな移行が可能になりました。
ドラッグ アンド ドロップ スイッチ ブロック: すべてのスイッチ ブロックは、ツールボックスからドラッグして直接入力できます。
ブロック プロジェクトに Python を直接入力: VEXcode を使用すると、Python コマンドをプロジェクトに直接組み込んで、他のブロックとシームレスに統合できます。 正しいコードの記述を支援するために、VEXcode は Python コマンドの自動補完機能も提供します。
コード変換: クリック 1 回でブロック スタック全体を Python に変換します。
この機能は、ブロックからテキストに移行しようとしている学習者に最適です。 スイッチブロックを使ったコーディングの詳細については、こちらをご覧ください
WebベースのVEXcodeで保存と読み込み
ファイル メニューのその他の変更:
- デバイスからロード が開くに変更されました。
- デバイスに保存 がを付けて保存に変更されました。
- また、 保存 ボタンを使用して手動で保存することもできます。
Chrome ブラウザで VEXcode EXP プロジェクトを読み込んで保存する方法のステップバイステップ ガイドについては、こちらをご覧ください。
アップデートされたAIビジョンセンサー検出
AI ビジョン センサーは、AprilTags と AI 分類を検出できるようになりました。
AprilTags は検出可能で、一意の ID を持つ画像です。 印刷して現場でロボットに使用することもできます。 印刷可能なAprilTag PDFをここからダウンロードしてください。
AI ビジョン センサーは、 VEX EXP 教室バンドルの異なる色のバッキーボールとリングを識別することもできます。
AI ビジョン センサーを ブロックPythonC 使用する方法については、こちらをご覧ください。
ブロックを声に出して読む
VEXcode EXP 4.0 内のすべてのブロックは、右クリックするだけで読み上げられるようになりました。
この機能は Android を除くすべてのデバイスで利用できます。
- カスタマイズ可能な音声: 新しいツール メニューでさまざまな音声から選択し、速度とピッチを調整します。
- コンテキスト メニューの統合: 任意のブロックを右クリックすると、読み上げが聞こえます。
VEXcode の読み取り機能の使用方法に関する詳細な手順については、こちらをご覧ください。
ツールメニュー
VEXcode EXP 4.0 の新しいツール メニューには、生産性とアクセシビリティのための機能が満載されています。
キーボードショートカット
ヘルプ ドキュメントの開始、停止、および開くための新しいキーボード ショートカットが利用できます。
| マック | ウィンドウズ |
ハイコントラストテーマ
高コントラスト テーマでは、テキストと背景の区別が明確になり、視力低下、色覚異常、その他の視覚障害を持つユーザーがコンテンツを読みやすくなります。
| デフォルト | 高コントラスト |
音声設定
新しい Read Blocks 機能を使用すると、このメニューから、使用する音声、読み上げ速度、ピッチを変更できます。
APIドキュメント
包括的な API ドキュメントにアクセスすることで、VEX EXP ロボットの可能性を最大限に探求し、活用することがこれまで以上に簡単になります。
公式の VEX API リファレンス サイトにアクセスするには、ここをクリックしてください。
Web ベースのワイヤレス プロジェクトのダウンロード
Web ベースの VEXcode EXP は、EXP コントローラーを介して EXP Brain にワイヤレスで接続できるようになりました。