
หุ่นยนต์ที่ใช้ใน VRC Virtual Skills เป็นเวอร์ชันเสมือนของ Disco ซึ่งเป็นบอท VEX V5 Hero ที่ใช้ในปี 2022 - การแข่งขันหุ่นยนต์ VEX Robotics (VRC) ปี 2023 หมุนขึ้น Virtual Disco มีขนาดและมอเตอร์เหมือนกับ Disco จริง แต่มีเซ็นเซอร์เพิ่มเติมสำหรับการตั้งโปรแกรมอัตโนมัติใน VRC Virtual Skills ใน VRC Virtual Skills มีหุ่นยนต์เพียงตัวเดียวและกำหนดค่าไว้ล่วงหน้าแล้ว ทำให้ไม่จำเป็นต้องมีการกำหนดค่าหุ่นยนต์หรือโครงการแม่แบบที่กำหนดไว้ล่วงหน้า
การควบคุมหุ่นยนต์
ดิสโก้มีการควบคุมดังต่อไปนี้:
ระบบขับเคลื่อน ซึ่งจะทำให้หมวด “ระบบขับเคลื่อน” ของบล็อกในกล่องเครื่องมือของ VEXcode V5 สามารถขับเคลื่อนและหมุนหุ่นยนต์ได้
ไอดี ที่ควบคุมโดย Intake Motor Group ช่วยให้หุ่นยนต์รวบรวมและให้คะแนนดิสก์ได้
สามารถหมุนท่อไอดีได้โดยใช้กลุ่มมอเตอร์ไอดีและบล็อก [หมุนเพื่อ] การหมุนกลุ่มมอเตอร์ในทิศทาง 'เอาท์เทค' จะเคลื่อนดิสก์ไปทางไทล์ฟิลด์ ในขณะที่การหมุนในทิศทาง 'ไอดี' ช่วยให้คุณสามารถปล่อยดิสก์ขึ้นไปในอากาศเพื่อทำคะแนนในเป้าหมายสูง
ที่ด้านบนของช่องไอดีมีชุดล้อสองล้อ สามารถใช้หมุนลูกกลิ้งได้
โดยการหมุนกลุ่มมอเตอร์ไอดีขณะที่ล้อสัมผัสกับลูกกลิ้ง ลูกกลิ้งจะหมุนและเปลี่ยนสี
เซนเซอร์หุ่นยนต์
Virtual Disco ได้เพิ่มเซ็นเซอร์สำหรับการเขียนโปรแกรมอัตโนมัติใน VRC Virtual Skills
เซ็นเซอร์เฉื่อย
เซ็นเซอร์เฉื่อย ใช้กับระบบขับเคลื่อนเพื่อให้ Disco สามารถเลี้ยวได้อย่างแม่นยำและแม่นยำโดยใช้ส่วนหัวของระบบขับเคลื่อน
ส่วนหัวของระบบขับเคลื่อนรายงานค่าตั้งแต่ 0 ถึง 359.9 องศา และตามเข็มนาฬิกาจะเป็นค่าบวก
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับเซ็นเซอร์เฉื่อย ดูบทความนี้จากไลบรารี VEX
เซ็นเซอร์วัดระยะ
มีเซ็นเซอร์วัดระยะ หนึ่งตัวที่ด้านหน้า Virtual Disco
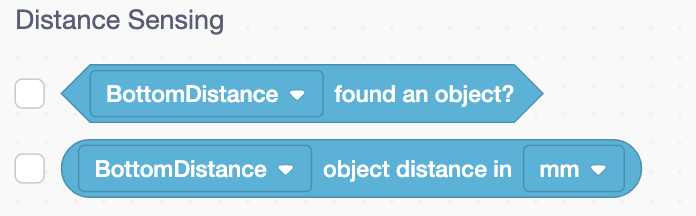
Distance Sensor รายงานว่าวัตถุอยู่ใกล้กับเซ็นเซอร์หรือไม่ รวมทั้งระยะห่างโดยประมาณจากด้านหน้าของเซ็นเซอร์ไปยังวัตถุ โดยมีหน่วยเป็นมิลลิเมตรหรือนิ้ว
เซ็นเซอร์วัดระยะที่ด้านหน้าดิสโก้สามารถใช้เพื่อระบุได้ว่าแผ่นดิสก์อยู่ด้านหน้าทางเข้าหรือไม่ หรือประมาณว่าแผ่นดิสก์อยู่บนสนามจากเซ็นเซอร์แค่ไหน
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับเซ็นเซอร์ระยะ V5 ดูบทความ VEX Library นี้
เครื่องติดตามสาย
Line Trackers ทั้งสามตัวจะอยู่ที่ด้านล่างของทางเข้าของ Disco สิ่งเหล่านี้สามารถใช้เพื่อตรวจจับตำแหน่งของแผ่นดิสก์ภายในช่องไอดีและกำหนดจำนวนแผ่นดิสก์ที่ถูกเก็บไว้ในช่องไอดีในปัจจุบัน
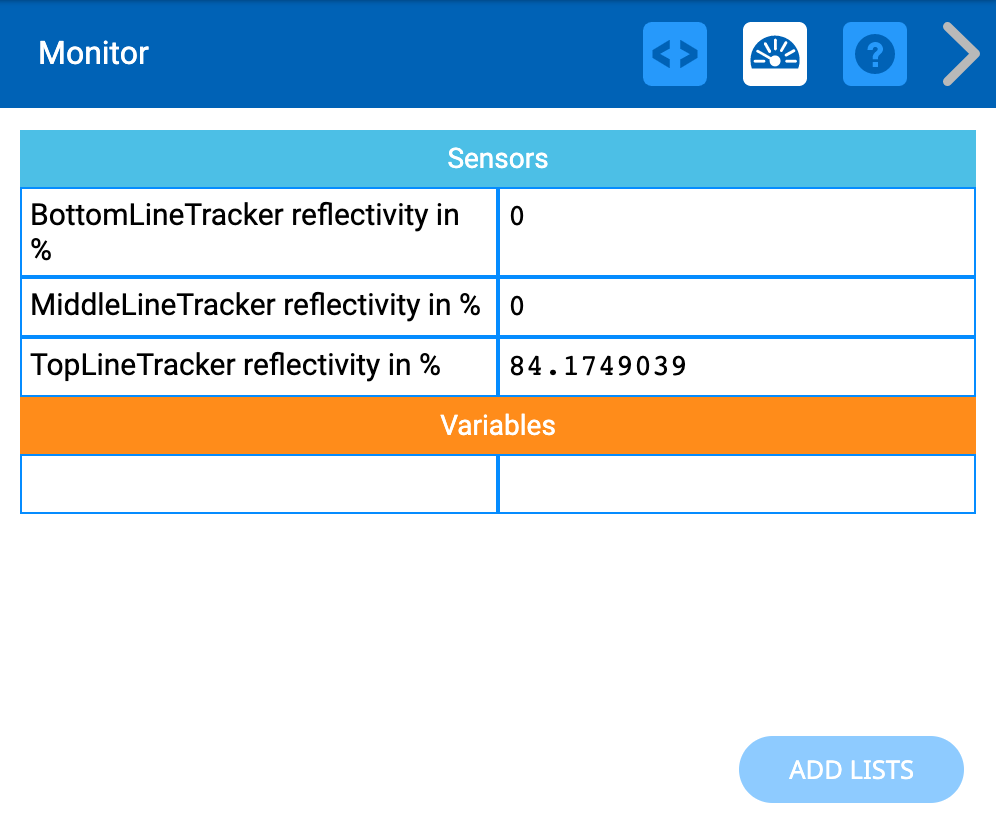
เครื่องติดตามเส้นเป็นเซ็นเซอร์แบบ 3 สายซึ่งประกอบด้วย LED อินฟราเรดและเซ็นเซอร์วัดแสงอินฟราเรด พวกเขาวัดการสะท้อนแสงของพื้นผิว สิ่งสำคัญคือเมื่อเขียนโค้ด Line Trackers เพื่อทำความเข้าใจค่าการสะท้อนแสงต่างๆ ที่จะรายงานขึ้นอยู่กับสภาพแวดล้อม ในตัวอย่างนี้ ขณะนี้มีดิสก์โหลดอยู่ที่ด้านบนสุดของช่องไอดี ดังนั้น Top Line Tracker จึงรายงานค่าการสะท้อนแสงที่สูงกว่า
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ VEX V5 Line Trackers ดูบทความนี้
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการตรวจสอบค่าเซ็นเซอร์ในโครงการ VRC Virtual Skills (แสดงในรูปภาพที่นี่) ดูบทความนี้
ออปติคัลเซนเซอร์
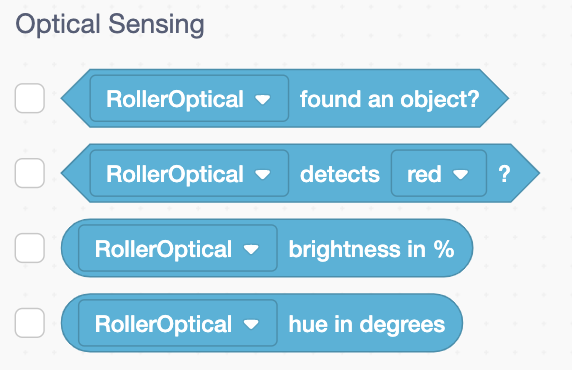
Optical Sensor จะรายงานว่าวัตถุอยู่ใกล้กับเซ็นเซอร์หรือไม่ และหากมี แสดงว่าวัตถุนั้นเป็นสีอะไร
ออปติคัลเซนเซอร์ยังสามารถรายงานความสว่างและค่าฮิวของวัตถุเป็นองศาได้
ออปติคัลเซนเซอร์ตั้งอยู่ที่ด้านบนของดิสโก้ใกล้กับล้อ เซ็นเซอร์นี้อยู่ในตำแหน่งที่ความสูงของลูกกลิ้งเพื่อใช้กำหนดสีของลูกกลิ้งแต่ละตัว
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับออปติคัลเซนเซอร์ ดูบทความ VEX Library นี้
เซ็นเซอร์ระบบกำหนดตำแหน่งเกม (GPS)
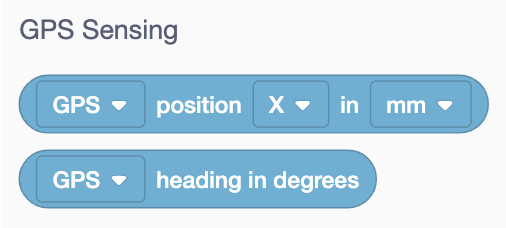
เซ็นเซอร์ GPS สามารถรายงานตำแหน่ง X และ Y ปัจจุบันของจุดศูนย์กลางการหมุนของดิสโก้ในหน่วยมิลลิเมตรหรือนิ้ว
GPS Sensor ยังสามารถรายงานทิศทางปัจจุบันเป็นองศาได้
เซ็นเซอร์ GPS ตั้งอยู่ใกล้ด้านหลังของดิสโก้ และใช้เพื่อระบุตำแหน่งและทิศทางของหุ่นยนต์บนสนามโดยการอ่านแถบรหัสสนาม GPS ตามขอบด้านในของสนาม
คุณสามารถใช้เซ็นเซอร์ GPS เพื่อช่วยดิสโก้นำทางสนามได้โดยการขับรถไปยังสถานที่เฉพาะโดยใช้ความรู้เกี่ยวกับระบบพิกัดคาร์ทีเซียน
การใช้เซ็นเซอร์ GPS ดิสโก้สามารถขับไปตามแกน X หรือ Y จนกว่าค่าของเซ็นเซอร์จะมากกว่าหรือน้อยกว่าค่าเกณฑ์ ซึ่งช่วยให้ดิสโก้สามารถขับรถโดยใช้การตอบสนองของเซ็นเซอร์แทนการกำหนดระยะทาง
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการระบุรายละเอียดตำแหน่งใน VRC Virtual Skills โดยใช้เซ็นเซอร์ GPS ดูบทความ VEX Library นี้