
Robot używany w VIQC Virtual Skills to wirtualna wersja Snapshot, VEX IQ Hero Bot, używana w Slapshot VEX IQ Competition (VIQC) w latach 2022–2023. Wirtualna migawka ma te same wymiary i silniki co fizyczna migawka, ale z dodatkowymi czujnikami do kodowania dodatkowych autonomicznych ruchów w VEXcode IQ. W wersji Slapshot VEXcode IQ jest tylko jeden robot i jest on już wstępnie skonfigurowany. Eliminuje to potrzebę konfiguracji robota lub wcześniej ustalonego projektu szablonowego.
Sterowanie robotem
Snapshot ma następujące elementy sterujące:
Układ napędowy z czujnikiem inercyjnym. Dzięki temu kategoria bloków „Układ napędowy” w zestawie narzędzi VEXcode IQ umożliwia kierowanie i obracanie robota.
Ramię sterowane przez silnik ramienia. Pozwala to robotowi wypuścić dyski z niektórych dozowników i sięgnąć ponad barierą, aby dotknąć strefy kontaktu pod koniec meczu.
- Ramię podnosi się i opuszcza za pomocą bloku [Obróć o] lub [Obróć do pozycji]. Domyślna pozycja to opuszczone ramię.
Wlot sterowany przez silnik dolotowy. Umożliwia to robotowi pobieranie dysków lub odwracanie wlotu (odwrócenie wlotu jest również nazywane wylotem), aby obrócić dyski na zewnątrz i od wlotu, a następnie je punktować.
- Dolot można obrócić za pomocą bloku [Spin for]. Obrócenie wlotu o 180 stopni powoduje wyciągnięcie dysku z Pola.
- Zarówno wlot, jak i wylot można przesunąć za pomocą bloku [Spin] . Obracając silnik przez określony czas, a następnie zatrzymując go, możesz upewnić się, że dysk został usunięty z wylotu.
Czujniki robota
Virtual Snapshot dodał czujniki do autonomicznego programowania w VEXcode IQ. Czujniki te opierają się na czujnikach VEX IQ (2. generacji), w tym czujniku odległości (2. generacji) i czujniku optycznym.
Inercyjny
Czujnik bezwładnościowy używany z układem napędowym . Dzięki temu robot może wykonywać dokładne i precyzyjne skręty.
Kurs układu napędowego zgłasza wartość od 0 do 359,9 stopnia, a kierunek zgodny z ruchem wskazówek zegara jest dodatni.
Czujnik odległości (2. generacji)
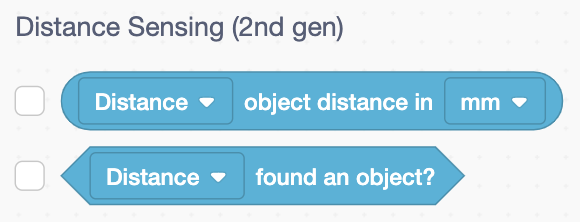
Czujnik odległości raportuje, czy obiekt znajduje się blisko czujnika, a także przybliżoną odległość od przodu czujnika do obiektu, w milimetrach lub calach.
Czujnik odległości na przednim zdjęciu może zostać wykorzystany do wykrycia, jak daleko od ogrodzenia znajduje się aktualnie robot.
Więcej informacji na temat czujnika odległości IQ (2. generacji) można znaleźć w artykulew Bibliotece VEX.
Przełącznik zderzaka
Przełącznik zderzakowy raportuje, czy jest aktualnie wciśnięty, czy nie.
Przełącznik zderzaka znajduje się w mechanizmie wlotu i można go wykorzystać do ustalenia, czy dysk został załadowany do wlotu.
Aby uzyskać więcej informacji na temat przełącznika zderzaka, , zobacz tę bibliotekę VEX artykuł.
Czujnik optyczny
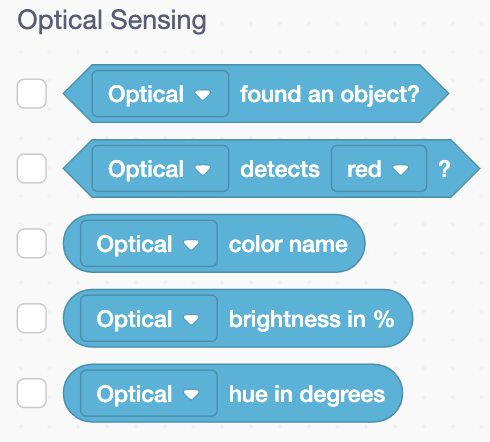
Czujnik optyczny wykorzystuje światło odbite do wykrywania koloru obiektu, wartości odcienia, wartości skali szarości i bliskości.
Czujnik optyczny umieszczony na przedniej migawce służy do wykrywania koloru dozowników.
Może to być przydatne przy określaniu, z którym dozownikiem należy wchodzić w interakcję i jak robot powinien reagować na dozownik, aby zwolnić dyski.