
Robot używany w VRC Virtual Skills to wirtualna wersja Disco, bot bohatera VEX V5, używany w roku 2022 - Rozkręcenie zawodów robotyki VEX (VRC) 2023. Virtual Disco ma te same wymiary i silniki co fizyczne Disco, ale ma dodatkowe czujniki do autonomicznego programowania w VRC Virtual Skills. W VRC Virtual Skills jest tylko jeden robot i jest już wstępnie skonfigurowany. Eliminuje to potrzebę konfiguracji robota lub z góry określonego szablonu projektu.
Sterowanie robotem
Disco ma następujące elementy sterujące:
Układ napędowy . Umożliwia to kategorii bloków „Napęd” w zestawie narzędzi VEXcode V5 do kierowania i obracania robota.
Wlot kontrolowany przez grupę silników dolotowych. Dzięki temu robot może zbierać i punktować dyski.
Dolot można obracać za pomocą grupy silnika dolotowego i bloku [Spin for]. Obracanie zespołu silników w kierunku „wylotu” przesunie dyski w kierunku płytek Pola, natomiast obracanie się w kierunku „wlotu” pozwoli ci wystrzelić dyski w powietrze, aby zdobyć punkty w Wysokim Celu.
W górnej części wlotu znajduje się zestaw dwóch kół. Można ich używać do obracania rolek.
Obracając grupę silnika wlotowego, gdy koła stykają się z walcem, wałek będzie się obracał i zmieniał kolor.
Czujniki robota
Virtual Disco dodało czujniki do autonomicznego programowania w VRC Virtual Skills.
Czujnik bezwładnościowy
Czujnik bezwładnościowy jest używany z układem napędowym, aby umożliwić Disco wykonywanie dokładnych i precyzyjnych zakrętów przy użyciu kierunku układu napędowego.
Kurs układu napędowego zgłasza wartość od 0 do 359,9 stopnia, a kierunek zgodny z ruchem wskazówek zegara jest dodatni.
Aby uzyskać więcej informacji na temat czujnika inercyjnego, przejrzyj ten artykuł z biblioteki VEX.
Czujnik odległości
Z przodu Virtual Disco znajduje się jeden czujnik odległości .
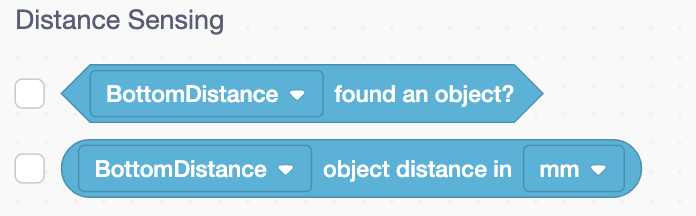
Czujnik odległości informuje, czy obiekt znajduje się blisko czujnika, a także przybliżoną odległość od przedniej części czujnika do obiektu, w milimetrach lub calach.
Czujnika odległości z przodu Disco można użyć do określenia, czy dysk znajduje się przed wlotem, lub w przybliżeniu, jak daleko znajdują się dyski na polu od czujnika.
Aby uzyskać więcej informacji na temat czujnika odległości V5, , zobacz ten artykuł w bibliotece VEX.
Śledzenie linii
Trzy moduły śledzące linię znajdują się wzdłuż dolnej części wlotu Disco. Można ich używać do wykrywania położenia dysków we wlocie i określania, ile dysków aktualnie znajduje się w wlocie.
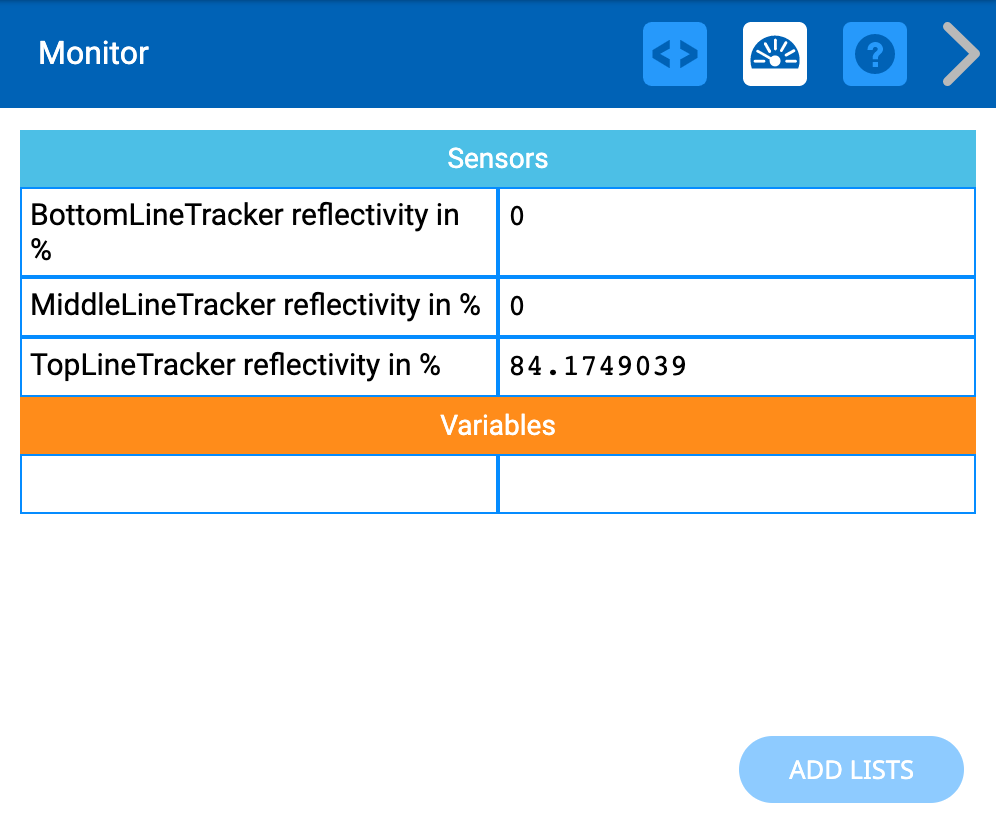
Urządzenia śledzące linię to czujnik 3-przewodowy składający się z diody LED na podczerwień i czujnika światła na podczerwień. Mierzą współczynnik odbicia powierzchni. Podczas kodowania modułów śledzących linię ważne jest zrozumienie różnych wartości współczynnika odbicia, które będą raportowane w zależności od środowiska. W tym przykładzie w górnej części wlotu znajduje się obecnie dysk, więc Top Line Tracker zgłasza wyższą wartość współczynnika odbicia.
Aby dowiedzieć się więcej o trackerach linii VEX V5, , zobacz ten artykuł.
Aby dowiedzieć się więcej o monitorowaniu wartości czujników w projekcie VRC Virtual Skills (pokazanym na obrazku tutaj), zobacz ten artykuł.
Czujnik optyczny
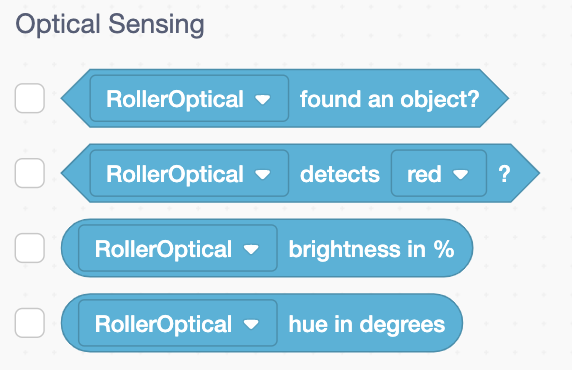
Czujnik optycznyr informuje, czy obiekt znajduje się blisko czujnika, a jeśli tak, jakiego koloru jest ten obiekt.
Czujnik optyczny może również zgłaszać jasność i wartość odcienia obiektu w stopniach.
Czujnik optyczny znajduje się na górze Disco, w pobliżu kół. Czujnik ten jest umieszczony na wysokości rolek i służy do określenia koloru każdego wałka
Aby uzyskać więcej informacji na temat czujnika optycznego , zobacz artykuł w bibliotece VEX.
Czujnik systemu pozycjonowania gry (GPS).
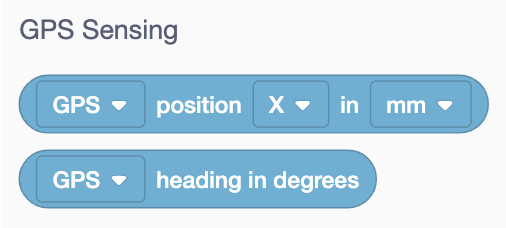
Czujnik GPS może raportować aktualną pozycję X i Y środka obrotu Disco w milimetrach lub calach.
Czujnik GPS może również raportować aktualny kurs w stopniach.
Czujnik GPS znajduje się w tylnej części Disco i służy do określania pozycji i orientacji robota na Polu poprzez odczyt pasków kodu pola GPS wzdłuż wewnętrznego obwodu pola.
Możesz użyć czujnika GPS, aby pomóc Disco poruszać się po polu, jadąc do określonych lokalizacji, korzystając ze znajomości kartezjańskiego układu współrzędnych.
Korzystając z czujnika GPS, Disco może poruszać się wzdłuż osi X lub Y, aż wartość czujnika będzie większa lub mniejsza niż wartość progowa. Dzięki temu Disco może prowadzić pojazd, korzystając ze sprzężenia zwrotnego z czujników, a nie z ustawionych odległości.
Aby uzyskać więcej informacji na temat identyfikowania szczegółów lokalizacji w VRC Virtual Skills za pomocą czujnika GPS, , zobacz ten artykuł Biblioteki VEX.