
De robot die wordt gebruikt in VRC Virtual Skills is een virtuele versie van Disco, de VEX V5 Hero Bot, gebruikt voor de 2022 -2023 VEX Robotics Competitie (VRC) Spin-up. Virtual Disco heeft dezelfde afmetingen en motoren als de fysieke Disco, maar met toegevoegde sensoren voor autonoom programmeren in VRC Virtual Skills. In VRC Virtual Skills is er slechts één robot en deze is al vooraf geconfigureerd. Dit elimineert de noodzaak voor een robotconfiguratie of een vooraf bepaald sjabloonproject.
Robotbesturing
Disco heeft de volgende bedieningselementen:
Een aandrijflijn. Hierdoor kan de categorie "Aandrijflijn" van blokken in de Toolbox van VEXcode V5 de robot besturen en draaien.
Een intake die wordt beheerd door de Intake Motor Group. Hierdoor kan de robot schijven verzamelen en scoren.
De inlaat kan worden rondgedraaid met behulp van de inlaatmotorgroep en het blok [Spin for]. Als je de motorgroep in de 'outtake'-richting draait, worden de schijven naar de veldtegels verplaatst, terwijl je door in de 'intake'-richting te draaien schijven in de lucht kunt lanceren om te scoren in het High Goal.
Bovenaan de inlaat bevindt zich een set van twee wielen. Deze kunnen worden gebruikt om de rollen te laten draaien.
Door de inlaatmotorgroep te laten draaien terwijl de wielen contact maken met de wals, zal de wals gaan draaien en van kleur veranderen.
Robotsensoren
Virtual Disco heeft sensoren toegevoegd voor autonoom programmeren in VRC Virtual Skills.
Inertiële sensor
De traagheidssensor wordt gebruikt met de aandrijflijn, zodat Disco nauwkeurige en precieze bochten kan maken met behulp van de aandrijflijn.
De koers van de aandrijflijn rapporteert een waarde van 0 tot 359,9 graden, en met de klok mee is dit positief.
Voor meer informatie over de traagheidssensor bekijkt u dit artikel uit de VEX-bibliotheek.
Afstandssensor
Er is één afstandssensor aan de voorkant van Virtual Disco.
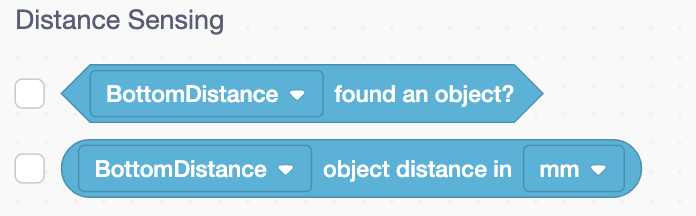
De afstandssensor meldt of een object zich dicht bij de sensor bevindt, evenals de geschatte afstand van de voorkant van de sensor tot een object, in millimeters of inches.
De afstandssensor aan de voorkant van Disco kan worden gebruikt om te bepalen of een schijf zich vóór de inlaat bevindt, of hoe ver de schijven zich ongeveer op het veld van de sensor bevinden.
Voor meer informatie over de V5-afstandssensor, Bekijk dit VEX Library-artikel.
Lijntrackers
De drie Line Trackers bevinden zich langs de onderkant van de inlaat van Disco. Deze kunnen worden gebruikt om de positie van schijven in de inlaat te detecteren en te bepalen hoeveel schijven er momenteel in de inlaat worden vastgehouden.
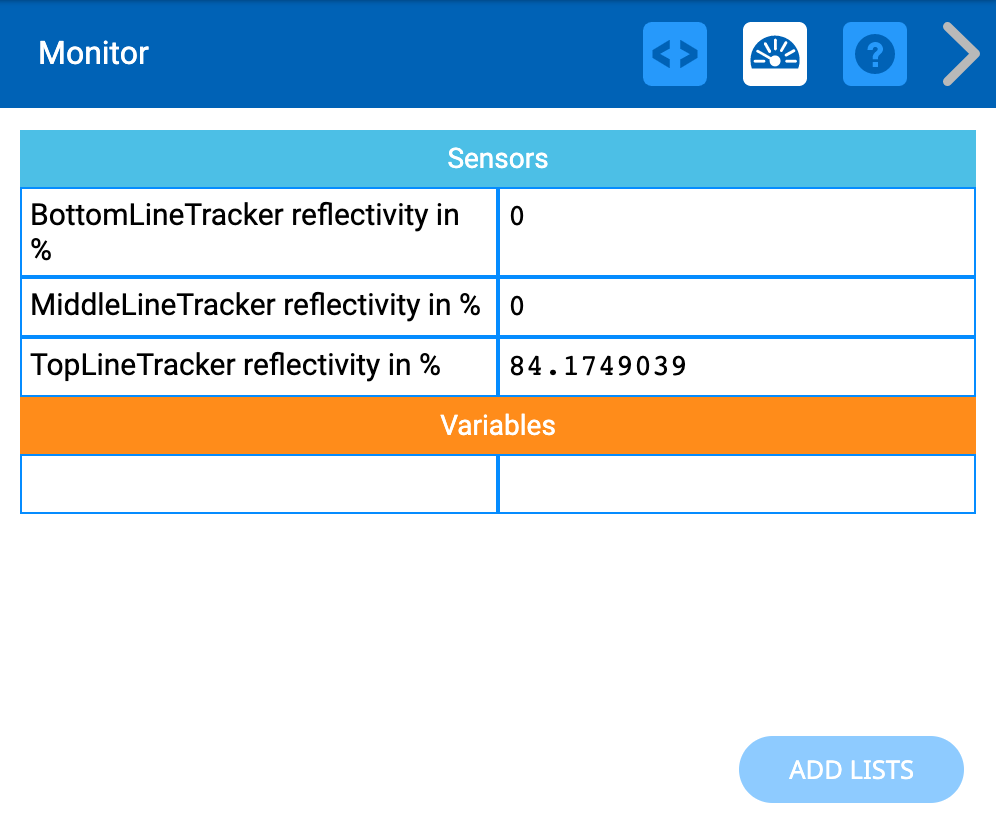
Line trackers zijn een 3-draads sensor bestaande uit een infrarood LED en een infrarood lichtsensor. Ze meten de reflectiviteit van het oppervlak. Bij het coderen van Line Trackers is het belangrijk om de verschillende reflectiviteitswaarden te begrijpen die afhankelijk van de omgeving worden gerapporteerd. In dit voorbeeld is er momenteel een schijf in de bovenkant van de inlaat geladen, dus de Top Line Tracker rapporteert een hogere reflectiviteitswaarde.
Voor meer informatie over VEX V5 Line Trackers raadpleegt u dit artikel.
Voor meer informatie over het monitoren van sensorwaarden in een VRC Virtual Skills-project (hier weergegeven in de afbeelding), raadpleegt u dit artikel.
Optische sensor
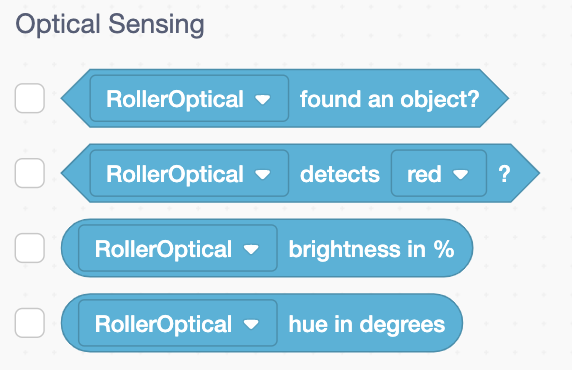
De Optical Sensor meldt of een object zich dicht bij de sensor bevindt, en zo ja, welke kleur dat object heeft.
De optische sensor kan ook de helderheid en de tintwaarde van een object in graden rapporteren.
De optische sensor bevindt zich bovenaan Disco, vlakbij de wielen. Deze sensor wordt ter hoogte van de rollen geplaatst en wordt gebruikt om de kleur van elke rol te bepalen
Voor meer informatie over de optische sensor zie dit VEX Library-artikel.
Sensor voor spelpositioneringssysteem (GPS).
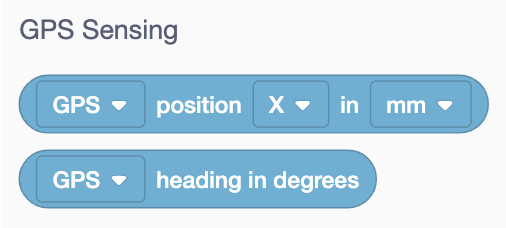
De GPS-sensor kan de huidige X- en Y-positie van het rotatiecentrum van Disco in millimeters of inches rapporteren.
De GPS-sensor kan ook de huidige koers in graden rapporteren.
De GPS-sensor bevindt zich aan de achterkant van Disco en wordt gebruikt om de positie en oriëntatie van de robot op het veld te bepalen door de GPS-veldcodestroken langs de binnenrand van het veld te lezen.
U kunt de GPS-sensor gebruiken om Disco te helpen bij het navigeren door het veld door naar specifieke locaties te rijden met behulp van uw kennis van het Cartesiaanse coördinatensysteem.
Met behulp van de GPS Sensor kan Disco langs de X- of Y-as rijden totdat de waarde van de sensor groter of kleiner is dan een drempelwaarde. Hierdoor kan Disco rijden op basis van sensorfeedback in plaats van ingestelde afstanden.
Voor meer informatie over het identificeren van locatiegegevens in VRC Virtual Skills met behulp van de GPS-sensor, , zie dit VEX Library-artikel.