
VRC Virtual Skills 에서 사용된 로봇은 2022년에 사용된 VEX V5 Hero Bot인 Disco의 가상 버전입니다. -2023 VEX Robotics Competition(VRC) 스핀업. Virtual Disco는 실제 Disco와 동일한 크기와 모터를 가지고 있지만 VRC Virtual Skills의 자율 프로그래밍을 위한 센서가 추가되었습니다. VRC Virtual Skills에는 하나의 로봇만 있으며 이미 사전 구성되어 있습니다. 따라서 로봇 구성이나 미리 결정된 템플릿 프로젝트가 필요하지 않습니다.
로봇 제어
Disco에는 다음과 같은 컨트롤이 있습니다.
구동계. 이를 통해 VEXcode V5의 도구 상자에 있는 "드라이브 트레인" 범주의 블록이 로봇을 구동하고 돌릴 수 있습니다.
Intake Motor Group에 의해 제어되는 흡기 . 이를 통해 로봇은 디스크를 수집하고 점수를 매길 수 있습니다.
흡기는 흡기 모터 그룹과 [Spin for] 블록을 사용하여 회전할 수 있습니다. 모터 그룹을 'outtake' 방향으로 돌리면 디스크가 필드 타일 쪽으로 이동하고 'intake' 방향으로 돌리면 디스크를 공중으로 발사하여 High Goal에서 득점할 수 있습니다.
흡입구 상단에는 두 개의 바퀴 세트가 있습니다. 롤러를 회전시키는 데 사용할 수 있습니다.
휠이 롤러와 접촉하는 동안 흡기 모터 그룹을 회전시키면 롤러가 회전하면서 색상이 바뀝니다.
로봇 센서
Virtual Disco는 VRC Virtual Skills에 자율 프로그래밍을 위한 센서를 추가했습니다.
관성 센서
관성 센서 는 Disco가 구동계 방향을 사용하여 정확하고 정밀한 회전을 할 수 있도록 구동계와 함께 사용됩니다.
구동계 방향은 0도에서 359.9도 사이의 값을 보고하며 시계 방향은 양수입니다.
관성 센서에 대한 자세한 내용은 VEX 라이브러리에서 이 문서를 참조하십시오.
거리 센서
Virtual Disco 전면에 거리 센서 1개가 있습니다.
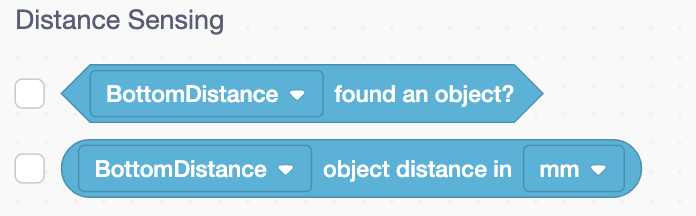
거리 센서는 물체가 센서에 가까이 있는지 여부와 센서 전면에서 물체까지의 대략적인 거리(밀리미터 또는 인치)를 보고합니다.
Disco 전면에 있는 거리 센서를 사용하여 디스크가 흡입구 앞에 있는지 또는 디스크가 센서에서 Field에 있는 대략적인 거리를 확인할 수 있습니다.
V5 거리 센서에 대한 자세한 내용은 VEX 라이브러리 문서를 참조하십시오.
라인 트래커
3개의 Line Tracker 는 Disco의 흡입구 아래쪽을 따라 위치합니다. 이들은 흡입구 내의 디스크 위치를 감지하고 현재 흡입구에 얼마나 많은 디스크가 있는지 확인하는 데 사용할 수 있습니다.
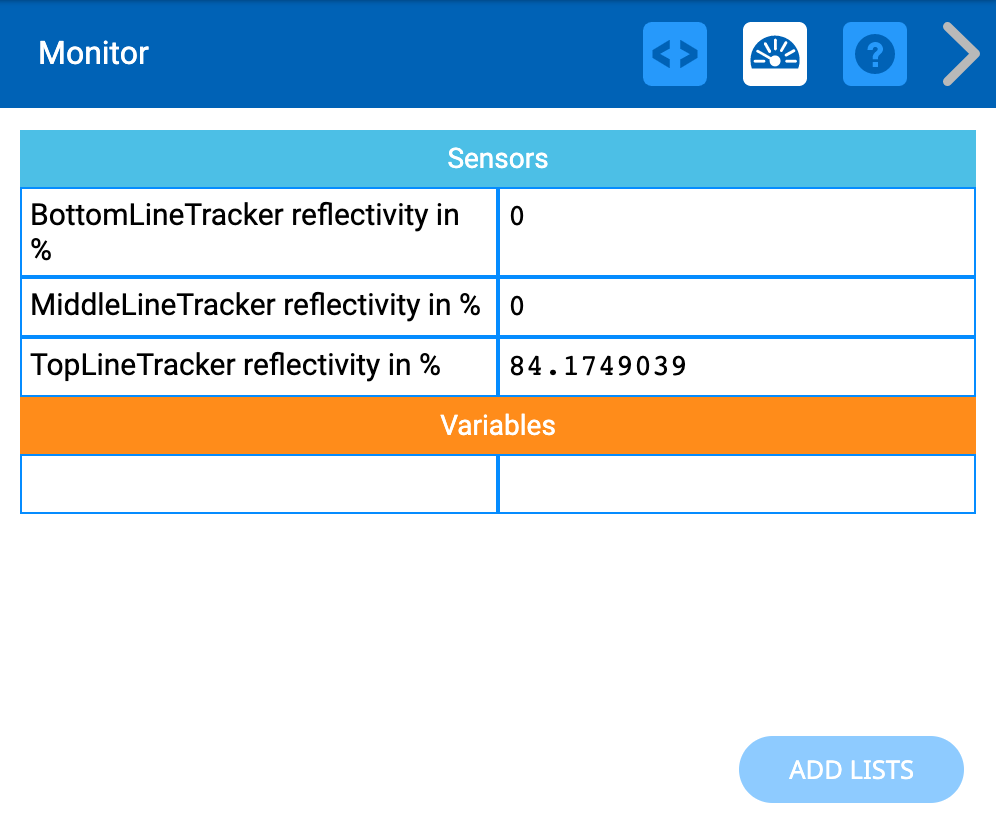
라인 트래커는 적외선 LED와 적외선 센서로 구성된 3선식 센서입니다. 그들은 표면의 반사율을 측정합니다. Line Tracker를 코딩할 때 환경에 따라 보고되는 다양한 반사율 값을 이해하는 것이 중요합니다. 이 예에서는 현재 흡입구 상단에 로드된 디스크가 있으므로 Top Line Tracker는 더 높은 반사율 값을 보고합니다.
VEX V5 라인 트래커에 대해 자세히 알아보려면 이 문서를 참조하십시오.
VRC Virtual Skills 프로젝트(여기 이미지에 표시됨)에서 센서 값을 모니터링하는 방법에 대해 자세히 알아보려면 이 문서를 참조하세요.
광센서
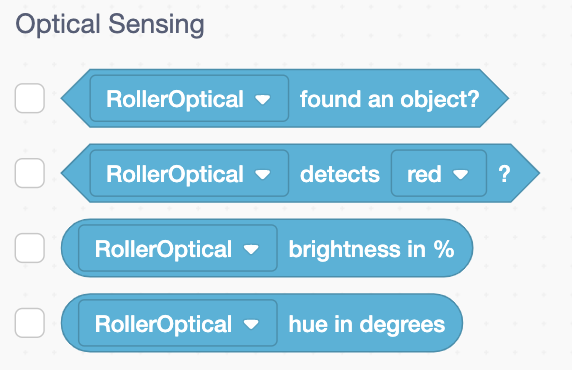
Optical Sensor는 물체가 센서에 가까이 있는지, 그리고 있다면 물체의 색상이 무엇인지 보고합니다.
광 센서는 또한 물체의 밝기와 색조 값을 도 단위로 보고할 수 있습니다.
광학 센서는 휠 근처의 Disco 상단에 있습니다. 이 센서는 각 롤러의 색상을 결정하는 데 사용되는 롤러 높이에 위치합니다.
광학 센서 에 대한 자세한 내용은 이 VEX 라이브러리 문서를 참조하세요.
게임 포지셔닝 시스템(GPS) 센서
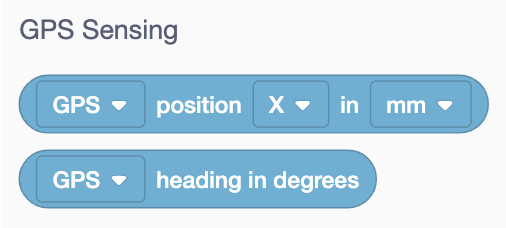
GPS 센서 는 Disco 회전 중심의 현재 X 및 Y 위치를 밀리미터 또는 인치 단위로 보고할 수 있습니다.
GPS 센서는 현재 방향을 도 단위로 보고할 수도 있습니다.
GPS 센서는 Disco의 뒤쪽 근처에 있으며 필드의 내부 둘레를 따라 GPS 필드 코드 스트립을 읽어 필드에서 로봇의 위치와 방향을 결정하는 데 사용됩니다.
직교 좌표계에 대한 지식을 사용하여 특정 위치로 운전하여 Disco가 필드를 탐색하는 데 GPS 센서를 사용할 수 있습니다.
GPS 센서를 사용하여 Disco는 센서 값이 임계값보다 크거나 작을 때까지 X축 또는 Y축을 따라 운전할 수 있습니다. 이를 통해 Disco는 설정된 거리 대신 센서 피드백을 사용하여 운전할 수 있습니다.
GPS 센서 를 사용하여 VRC Virtual Skills에서 위치 세부 정보를 식별하는 방법에 대한 자세한 내용은 이 VEX 라이브러리 문서를 참조하십시오.