
A VIQC Virtual Skills-ben használt robot a Snapshot, a VEX IQ Hero Bot virtuális változata, amelyet a 2022-2023-as VEX IQ Competition (VIQC) Slapshot-hoz használnak. A Virtual Snapshot méretei és motorjai ugyanazok, mint a fizikai Snapshot, de hozzáadott érzékelőkkel, amelyek további autonóm mozgásokat kódolnak a VEXcode IQ-ban. A VEXcode IQ Slapshot verziójában csak egy robot van, és az már előre be van állítva. Így nincs szükség robotkonfigurációra vagy előre meghatározott sablonprojektre.
Robotvezérlés
A Snapshot a következő vezérlőkkel rendelkezik:
hajtáslánc inerciális érzékelővel. Ez lehetővé teszi, hogy a VEXcode IQ eszköztárában a „Drivetrain” blokkok kategóriája hajtsa és forgatja a robotot.
Egy kar , amelyet az Arm Motor vezérel. Ez lehetővé teszi a robot számára, hogy lemezeket szabadítson ki egyes adagolókból, és átnyúljon az akadályon, hogy megérintse az érintkezési zónát a meccs végén.
- A kar felemelése és leengedése a [Spin for] vagy [Spin to position] blokk segítségével történik. Az alapértelmezett helyzet a kar leengedése.
A szívómotor által vezérelt szívó . Ez lehetővé teszi a robot számára, hogy lemezeket vegyen be, vagy megfordítsa a bemenetet (a bevitel megfordítását kivezetésnek is nevezik), hogy kipörgesse a lemezeket a bemenettől, és pontozza azokat.
- A beszívás a [Spin for] blokk segítségével forgatható. A szívófej 180 fokos megpörgetése egy lemezt vesz fel a mezőről.
- A bemenet és a kivezetés is mozgatható a [Spin] blokk segítségével. Ha a motort egy beállított ideig forgatja, majd leállítja, biztosíthatja, hogy a lemez eltávolítva legyen a kimenetből.
Robot érzékelők
A Virtual Snapshot szenzorokkal egészítette ki az autonóm programozást a VEXcode IQ-ban. Ezek az érzékelők a VEX IQ (2. generációs) érzékelőkön alapulnak, beleértve a távolságérzékelőt (2. generáció) és az optikai érzékelőt.
Inerciális
inerciális érzékelő , amelyet a hajtáslánccal használnak. Ez lehetővé teszi a robot számára, hogy pontos és precíz fordulásokat hajtson végre.
A hajtáslánc fejléce 0 és 359,9 fok közötti értéket jelez, az óramutató járásával megegyező irányban pedig pozitív.
Távolságérzékelő (2. generáció)
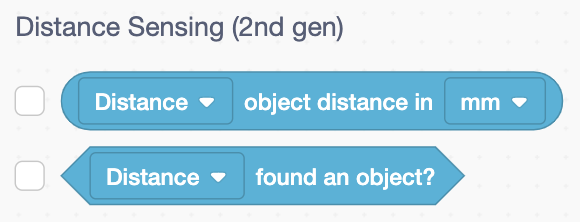
A távolságérzékelő jelzi, ha egy tárgy közel van az érzékelőhöz, valamint a hozzávetőleges távolságot az érzékelő elejétől egy tárgyra, milliméterben vagy hüvelykben.
Az elülső pillanatfelvételen található távolságérzékelő segítségével megállapítható, milyen messze van a robot a kerítéstől.
Lökhárító kapcsoló
A rövidzár kapcsoló jelzi, hogy éppen le van-e nyomva vagy sem.
A lökhárító kapcsoló a bemeneti mechanizmuson belül található, és felhasználható annak meghatározására, hogy van-e lemez betöltve a szívónyílásba.
A lökhárító kapcsolóval kapcsolatos további információkért lásd: VEX Library cikk.
Optikai érzékelő
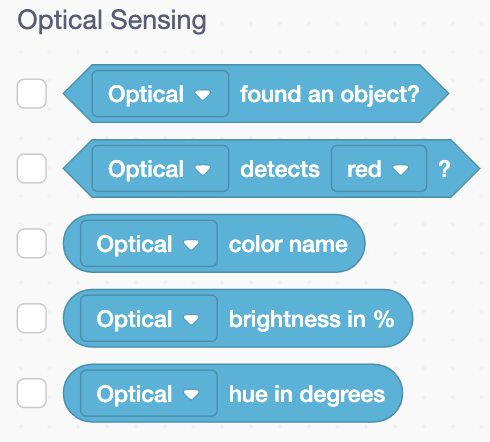
A optikai érzékelő visszavert fényt használ az objektum színének, színárnyalatának, szürkeárnyalatos értékének és közelségének észlelésére.
Az elülső pillanatképen található optikai érzékelő az adagolók színének érzékelésére szolgál.
Ez hasznos lehet annak meghatározásakor, hogy melyik adagolóval kommunikáljon, és hogyan reagáljon a robot az adagolóra, hogy kiengedje a lemezeket.