
A VRC Virtual Skills -ben használt robot a Disco virtuális változata, a VEX V5 Hero Bot, amelyet 2022-ben használnak. -2023 VEX Robotics Competition (VRC) Spin Up. A Virtual Disco méretei és motorjai ugyanolyanok, mint a fizikai Disco, de hozzáadott érzékelőkkel a VRC Virtual Skills autonóm programozásához. A VRC Virtual Skillsben csak egy robot van, és az már előre konfigurálva van. Így nincs szükség robotkonfigurációra vagy előre meghatározott sablonprojektre.
Robotvezérlés
A Disco a következő vezérlőkkel rendelkezik:
A hajtáslánc. Ez lehetővé teszi, hogy a VEXcode V5 eszköztárában a „Drivetrain” blokkok kategóriája hajtsa és forgatja a robotot.
Egy beszívás , amelyet az Intake Motor Group szabályoz. Ez lehetővé teszi a robot számára, hogy lemezeket gyűjtsön és pontozzon.
A szívófej a szívómotor-csoport és a [Spin for] blokk segítségével forgatható. Ha a motorcsoportot "kilépés" irányba forgatod, a korongok a mezőlapkák felé mozdulnak el, míg a "beszívás" irányban pörgetve korongokat emelhetsz a levegőbe, hogy gólt érj el.
A szívónyílás tetején egy két kerékből álló készlet található. Ezekkel lehet forgatni a görgőket.
Ha megpörgeti a szívómotor-csoportot, miközben a kerekek érintkeznek a görgővel, a görgő forog, és megváltoztatja a színét.
Robot érzékelők
A Virtual Disco szenzorokkal egészítette ki az autonóm programozást a VRC Virtual Skills-ben.
Inerciális érzékelő
A inerciális érzékelő a hajtáslánccal együtt használható, hogy a Disco pontos és precíz kanyarokat hajtson végre a hajtáslánc fejléce segítségével.
A hajtáslánc fejléce 0 és 359,9 fok közötti értéket jelez, az óramutató járásával megegyező irányban pedig pozitív.
Az inerciális érzékelővel kapcsolatos további információkért tekintse meg ezt a cikket a VEX Libraryból.
Távolság érzékelő
A Virtual Disco elején egy távolságérzékelő található.
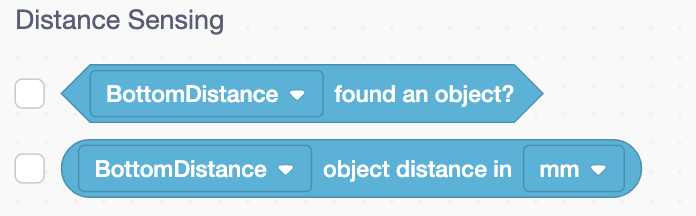
A távolságérzékelő jelzi, ha egy tárgy közel van az érzékelőhöz, valamint az érzékelő eleje és egy tárgy hozzávetőleges távolságát milliméterben vagy hüvelykben.
A Disco elülső részén található távolságérzékelő segítségével megállapítható, hogy van-e lemez a bemeneti nyílás előtt, vagy hozzávetőlegesen milyen messze vannak a lemezek a mezőn az érzékelőtől.
További információért a V5 távolságérzékelőről, Tekintse meg ezt a VEX Library cikket.
Vonalkövetők
A három vonalkövető a Disco szívónyílásának alsó oldalán található. Ezek segítségével észlelhető a lemezek helyzete a bemeneten belül, és meghatározható, hogy hány lemez van jelenleg a bemenetben.
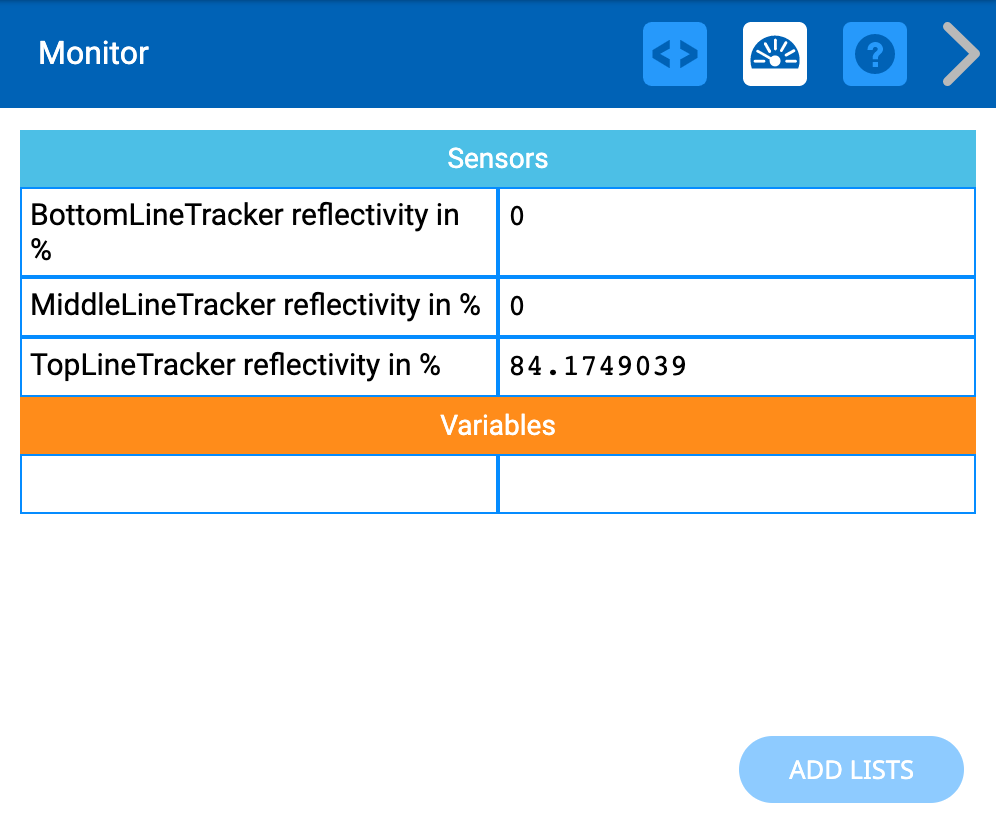
A vonalkövetők egy 3 vezetékes érzékelő, amely egy infravörös LED-ből és egy infravörös fényérzékelőből áll. Mérik a felület fényvisszaverő képességét. A vonalkövetők kódolásakor fontos megérteni a környezettől függően jelentett különböző tükrözési értékeket. Ebben a példában jelenleg egy lemez van betöltve a bemenet tetején, így a Top Line Tracker magasabb visszaverési értéket jelez.
Ha többet szeretne megtudni a VEX V5 vonalkövetőkről, olvassa el ezt a cikket.
Ha többet szeretne megtudni a szenzorértékek VRC Virtual Skills projektben történő megfigyeléséről (az itt látható képen), tekintse meg ezt a cikket.
Optikai érzékelő
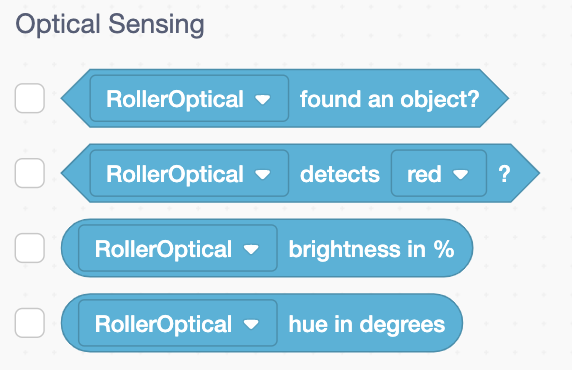
A optikai érzékelőr jelzi, ha egy tárgy közel van az érzékelőhöz, és ha igen, milyen színű az objektum.
Az optikai érzékelő képes egy objektum fényerejét és színezetét fokban kifejezni.
Az optikai érzékelő a Disco tetején, a kerekek közelében található. Ez az érzékelő a görgők magasságában van elhelyezve, hogy meghatározza az egyes görgők színét
Az optikai érzékelővel ( ) kapcsolatos további információkért tekintse meg ezt a VEX-könyvtári cikket.
Game Positioning System (GPS) érzékelő
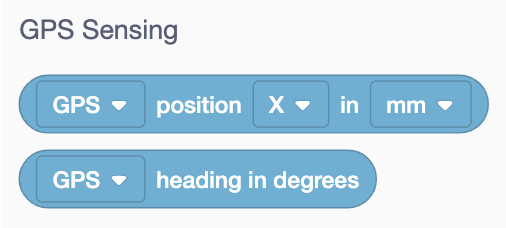
A GPS-érzékelő képes jelezni a Disco forgásközéppontjának aktuális X és Y pozícióját milliméterben vagy hüvelykben.
A GPS-érzékelő az aktuális irányt fokban is jelezheti.
A GPS-érzékelő a Disco hátuljának közelében található, és arra szolgál, hogy meghatározza a robot pozícióját és tájolását a pályán a GPS-mezőkódcsíkok leolvasásával a pálya belső kerülete mentén.
Használhatja a GPS-érzékelőt, hogy segítse a Disco navigációját a mezőn, ha meghatározott helyekre vezet, felhasználva a derékszögű koordináta-rendszer ismereteit.
A GPS-érzékelő használatával a Disco addig tud haladni az X vagy Y tengely mentén, amíg az érzékelő értéke nem haladja meg vagy nem éri el a küszöbértéket. Ez lehetővé teszi a Disco számára, hogy a beállított távolságok helyett az érzékelő visszacsatolásával vezessen.
További információért a VRC Virtual Skills GPS-érzékelővel történő azonosításáról, , tekintse meg ezt a VEX-könyvtári cikket.