
Le robot utilisé dans le VIQC Virtual Skills est une version virtuelle de Snapshot, le VEX IQ Hero Bot, utilisé pour le Slapshot du VEX IQ Competition (VIQC) 2022-2023. Virtual Snapshot a les mêmes dimensions et moteurs que le Snapshot physique, mais avec des capteurs supplémentaires pour coder des mouvements autonomes supplémentaires dans VEXcode IQ. Dans la version VEXcode IQ de Slapshot, il n'y a qu'un seul robot, et il est déjà préconfiguré. Cela élimine le besoin d’une configuration de robot ou d’un projet modèle prédéterminé.
Contrôles des robots
Snapshot possède les contrôles suivants :
Une transmission avec un capteur inertiel. Cela permet à la catégorie de blocs « Drivetrain » de la boîte à outils de VEXcode IQ de conduire et de faire tourner le robot.
Un Bras contrôlé par le moteur du bras. Cela permet au robot de libérer les disques de certains distributeurs et de passer par-dessus la barrière pour toucher la zone de contact à la fin d'un match.
- Le bras est levé et abaissé à l'aide du bloc [Spin for] ou [Spin to position]. La position par défaut est que le bras soit abaissé.
Une admission contrôlée par le moteur d'admission. Cela permet au robot d'introduire des disques ou d'inverser l'admission (l'inversion de l'admission est également appelée sortie) pour faire tourner les disques et les éloigner de l'admission et les marquer.
- L'admission peut être tournée à l'aide du bloc [Spin for]. Faire tourner l'admission à 180 degrés fait entrer un disque du champ.
- L'admission et la sortie peuvent être déplacées à l'aide du bloc [Spin] . En faisant tourner le moteur pendant une durée définie, puis en arrêtant le moteur, vous pouvez vous assurer que le disque a été dégagé de la sortie.
Capteurs de robots
Virtual Snapshot a ajouté des capteurs pour une programmation autonome dans VEXcode IQ. Ces capteurs sont basés sur les capteurs VEX IQ (2e génération), notamment le capteur de distance (2e génération) et le capteur optique.
Inertiel
Un capteur inertiel qui est utilisé avec la transmission . Cela permet au robot d'effectuer des virages précis et précis.
Le cap de la transmission indique une valeur de 0 à 359,9 degrés, et dans le sens des aiguilles d'une montre est positif.
Capteur de distance (2e génération)
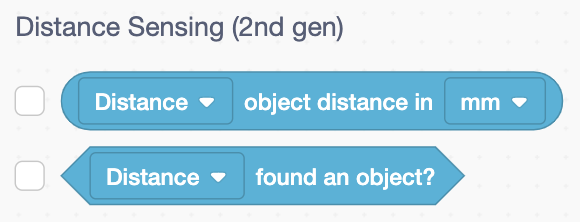
Le capteur de distance signale si un objet est proche du capteur, ainsi que la distance approximative depuis l'avant du capteur. à un objet, en millimètres ou en pouces.
Le capteur de distance sur l'instantané avant peut être utilisé pour détecter à quelle distance de la clôture se trouve actuellement le robot.
Pour plus d'informations sur le capteur de distance IQ (2e génération), , consultez cet article de la bibliothèque VEX.
Interrupteur de pare-chocs
Le commutateur de pare-chocs indique s'il est actuellement enfoncé ou non.
L'interrupteur pare-chocs est situé dans le mécanisme d'admission et peut être utilisé pour déterminer si un disque a été chargé dans l'admission.
Pour plus d'informations sur le commutateur pare-chocs, , consultez cette bibliothèque VEX article.
Capteur optique
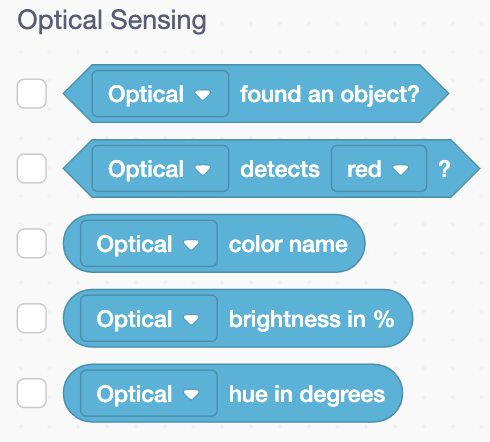
Le capteur optique utilise la lumière réfléchie pour détecter la couleur, la valeur de teinte, la valeur d'échelle de gris et la proximité d'un objet.
Le capteur optique situé sur le Snapshot avant est utilisé pour détecter la couleur des distributeurs.
Cela peut être utile pour déterminer avec quel distributeur interagir et comment le robot doit réagir au distributeur pour libérer les disques.