
Le robot utilisé dans VRC Virtual Skills est une version virtuelle de Disco, le VEX V5 Hero Bot, utilisé pour l'édition 2022. -2023 Concours de robotique VEX (VRC) Spin Up. Virtual Disco a les mêmes dimensions et moteurs que la Disco physique, mais avec des capteurs supplémentaires pour une programmation autonome dans VRC Virtual Skills. Dans VRC Virtual Skills, il n'y a qu'un seul robot, et il est déjà préconfiguré. Cela élimine le besoin d'une configuration de robot ou d'un projet de modèle prédéterminé.
Commandes de robots
Disco a les commandes suivantes :
Une transmission . Cela permet à la catégorie de blocs « Transmission » de la boîte à outils de VEXcode V5 de conduire et de faire tourner le robot.
Une admission qui est contrôlée par l'Intake Motor Group. Cela permet au robot de collecter et de marquer les disques.
L'admission peut être tournée à l'aide du groupe moteur d'admission et du bloc [Spin for]. Faire tourner le groupe moteur dans le sens « sortie » déplacera les disques vers les tuiles Terrain, tandis que tourner dans le sens « admission » vous permet de lancer des disques dans les airs pour marquer dans le but élevé.
Au sommet de l'admission se trouve un ensemble de deux roues. Ceux-ci peuvent être utilisés pour faire tourner les rouleaux.
En faisant tourner le groupe moteur d'admission pendant que les roues sont en contact avec le rouleau, le rouleau tournera et changera de couleur.
Capteurs de robots
Virtual Disco a ajouté des capteurs pour une programmation autonome dans VRC Virtual Skills.
Capteur inertiel
Le capteur inertiel est utilisé avec la transmission pour permettre à Disco d'effectuer des virages précis et précis en utilisant le cap de la transmission.
Le cap de la transmission indique une valeur de 0 à 359,9 degrés, et dans le sens des aiguilles d'une montre est positif.
Pour plus d'informations sur le capteur inertiel, consultez cet article de la bibliothèque VEX.
Capteur de distance
Il y a un capteur de distance à l'avant de Virtual Disco.
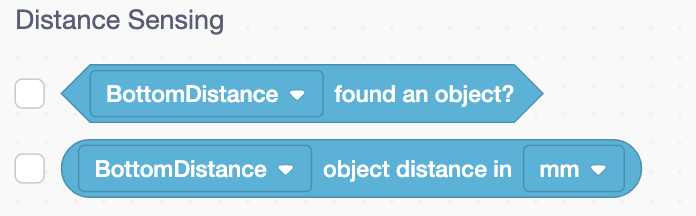
Le capteur de distance signale si un objet est proche du capteur, ainsi que la distance approximative entre l'avant du capteur et un objet, en millimètres ou en pouces.
Le capteur de distance situé à l'avant de Disco peut être utilisé pour déterminer si un disque se trouve devant l'admission ou à quelle distance approximative se trouvent les disques sur le terrain par rapport au capteur.
Pour plus d'informations sur le capteur de distance V5, Consultez cet article de la bibliothèque VEX.
Traqueurs de lignes
Les trois Line Trackers sont situés sous la prise d'air du Disco. Ceux-ci peuvent être utilisés pour détecter la position des disques dans l'admission et déterminer combien de disques sont actuellement contenus dans l'admission.
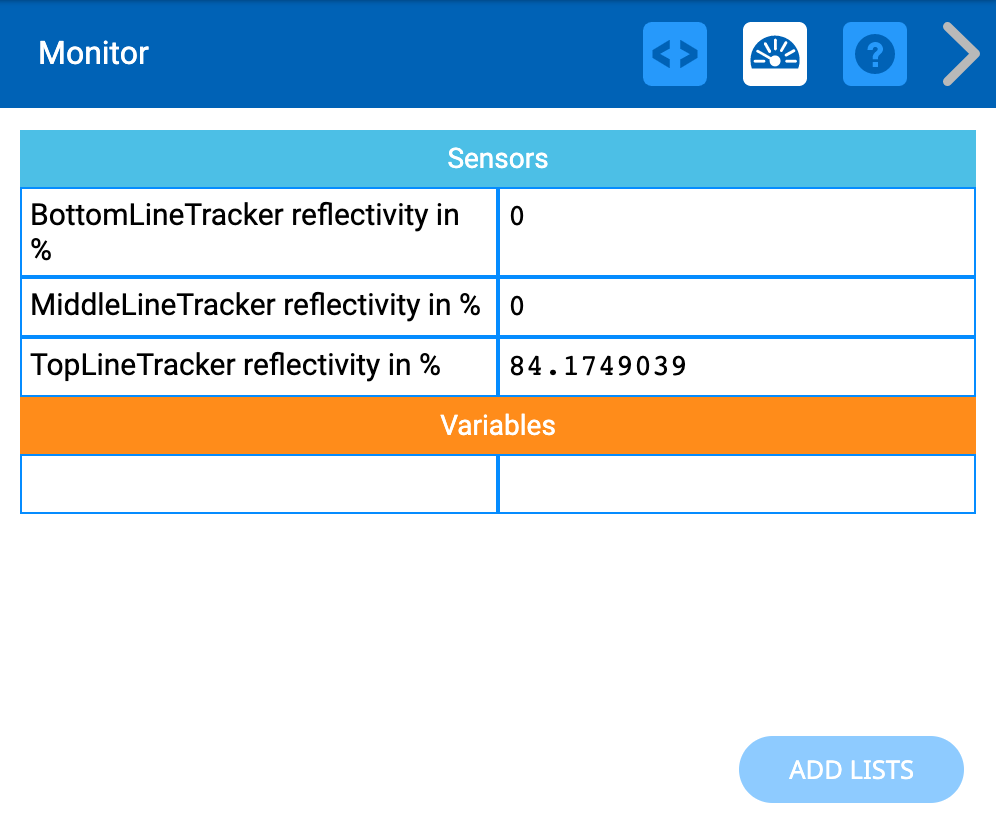
Les trackers de ligne sont un capteur à 3 fils composé d'une LED infrarouge et d'un capteur de lumière infrarouge. Ils mesurent la réflectivité de la surface. Il est important lors du codage des Line Trackers de comprendre les différentes valeurs de réflectivité qui seront signalées en fonction de l'environnement. Dans cet exemple, un disque est actuellement chargé en haut de l'admission, le Top Line Tracker signale donc une valeur de réflectivité plus élevée.
Pour en savoir plus sur les trackers de ligne VEX V5, consultez cet article.
Pour en savoir plus sur la surveillance des valeurs des capteurs dans un projet VRC Virtual Skills (illustré dans l'image ici), consultez cet article.
Capteur optique
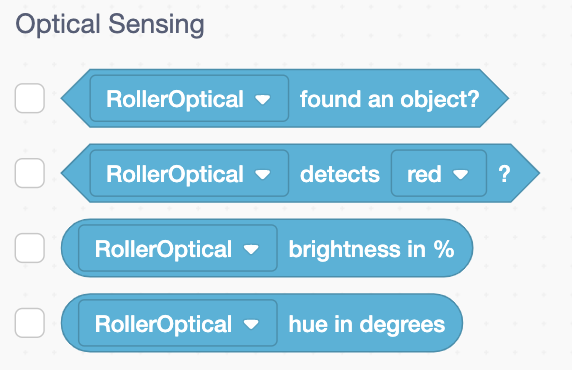
Le Optical Sensor signale si un objet est proche du capteur, et si oui, de quelle couleur est cet objet.
Le capteur optique peut également signaler la luminosité et la valeur de teinte d'un objet en degrés.
Le capteur optique est situé en haut de Disco, près des roues. Ce capteur est positionné à la hauteur des rouleaux pour être utilisé pour déterminer la couleur de chaque rouleau
Pour plus d'informations sur le capteur optique, , consultez cet article de la bibliothèque VEX.
Capteur du système de positionnement de jeu (GPS)
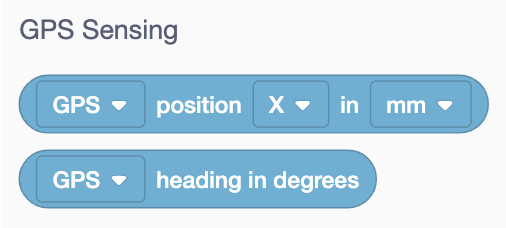
Le capteur GPS peut signaler la position X et Y actuelle du centre de rotation de Disco en millimètres ou en pouces.
Le capteur GPS peut également indiquer le cap actuel en degrés.
Le capteur GPS est situé près de l’arrière de Disco et est utilisé pour déterminer la position et l’orientation du robot sur le terrain en lisant les bandes de code de terrain GPS le long du périmètre intérieur du terrain.
Vous pouvez utiliser le capteur GPS pour aider Disco à naviguer sur le terrain en vous dirigeant vers des emplacements spécifiques en utilisant votre connaissance du système de coordonnées cartésiennes.
À l'aide du capteur GPS, Disco peut rouler le long des axes X ou Y jusqu'à ce que la valeur du capteur soit supérieure ou inférieure à une valeur seuil. Cela permet à Disco de conduire en utilisant les commentaires des capteurs au lieu des distances définies.
Pour plus d'informations sur l'identification des détails de localisation dans les compétences virtuelles VRC à l'aide du capteur GPS, , consultez cet article de la bibliothèque VEX.