
Während VEX IQ (2. Generation) STEM Labs für das IQ (2. Generation) Kit entwickelt wurde, gibt es viele Möglichkeiten, (2. Generation) STEM Labs mit Ihrem (1. Generation) Kit zu unterrichten. In diesem Artikel stellen wir Ihnen Ressourcen zur Verfügung, die Sie bei der Anpassung von STEM Labs (2. Generation) unterstützen und Ihnen die Flexibilität geben, alle IQ STEM Labs mit Ihrem IQ-Kit (1. Generation) zu unterrichten.
Allgemeine Überlegungen beim Unterrichten einer MINT-Laboreinheit (2. Generation) mit Kits (1. Generation).
Jede IQ-STEM-Laboreinheit (2. Generation) ist um einen abschließenden MINT-Klassenzimmerwettbewerb herum strukturiert. Die Einheitslektionen folgen einem vorhersehbaren Lernen-Üben-Wettbewerben-Format mit einer Abschlusslektion, die das Lernen der Schüler mit realen MINT-Berufen verbindet. Die wichtigsten Abschnitte, die angepasst werden müssen, sind die in der Einführungslektion empfohlenen Builds und Vorlagen sowie einige kleinere Anpassungen der Lern- und Übungsressourcen, um die Verwendung von Builds (der 1. Generation) zu ermöglichen.
- Weitere Informationen zum IQ (2. Generation) STEM Lab Unit-Format finden Sie in diesem Artikel .
- Sehen Sie sich die Artikel in diesem Abschnitt der STEM-Bibliothek an, um Unterstützung bei der Einrichtung und Durchführung eines STEM-Laborwettbewerbs zu erhalten.
In Lektion 1 jeder MINT-Laboreinheit (2. Generation) werden die Schüler gebeten, ihre Batterien zu überprüfen und aufzuladen, um sich auf die Aktivitäten der Einheit vorzubereiten. Bei einer Batterie (1. Generation) ist das Verfahren anders.
Der folgende Abschnitt identifiziert jede STEM-Laboreinheit der 2. Generation (Generation), den IQ-Build (2. Generation), der für dieses Lab verwendet wird, und einen kompatiblen IQ-Build (1. Generation), den Sie zum Abschließen von Lab-Aktivitäten verwenden können. Außerdem sind Vorschläge zur Anpassung des „Play“-Bereichs jedes Labs enthalten.
- Wählen Sie den Build-Namen aus, um die Build-Anweisungen in einem neuen Fenster zu öffnen.
Tauziehen
Entdecken Sie, wie sich der mechanische Vorteil und der Schwerpunkt auf die Fähigkeit Ihres Roboters auswirken, Objekte zu ziehen, und entwerfen Sie den besten Roboter, um einen Tauziehen-Wettbewerb zu gewinnen. Sehen Sie sich hier die Tug of War STEM Lab Unit an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
BaseBot 
|
Autopilot
|
Verwenden Sie die Vorlage Autopilot (Antriebsstrang 2 Motor) anstelle der Basebot-Vorlage (Antriebsstrang 2 Motor), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
Verwenden Sie Unterrichtsgegenstände mit einem Gewicht von ca. 1 und 2 Kilogramm (ca. 2 und 4 Pfund) anstelle der IQ-Aufbewahrungsbehälter, wie in den Übungs- und Herausforderungsaktivitäten der Lektionen 2 und 3 empfohlen. |
Team-Freeze-Tag
Testen Sie Ihre Fahrkünste, indem Sie Ihren Roboter mit dem IQ-Controller steuern, Räder auswählen und Sensoren hinzufügen, um an einem Team Freeze Tag-Wettbewerb teilzunehmen. Sehen Sie sich hier die Team Freeze Tag STEM Lab-Einheit an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
|
BaseBot
|
Autopilot
|
In Lektion 1 unterscheiden sich die Schritte zum Laden und Koppeln eines Controllers (1. Generation) geringfügig von den Anweisungen im Abschnitt „Vorbereitungen“. In diesem Abschnitt der STEM-Bibliothek finden Sie hilfreiche Informationen zum Laden und Koppeln eines Controllers (1. Generation). Verwenden Sie die Vorlage Autopilot (Antriebsstrang 2 Motor) anstelle der Basebot-Vorlage (Antriebsstrang 2 Motor), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
In Lektion 2 unterscheidet sich das Verfahren zum Zugreifen auf und Ausführen des Fahrersteuerungsprogramms auf einem Brain (1. Generation) geringfügig von den im Abschnitt „Lernen“ gezeigten Schritten. In diesem Artikel erfahren Sie, wie Sie das Fahrerkontrollprogramm mit einem Gehirn (1. Generation) ausführen und Ihre Schüler damit vertraut machen dieser Prozess. In Lektion 4 fügen die Schüler ihrem Roboter einen IQ Bumper Switch hinzu, auf der Rückseite des Autopiloten sind jedoch bereits zwei montiert. Lassen Sie die Schüler einen Stoßfängerschalter entfernen und den verbleibenden Stoßfänger zentrieren und die Übungs- und Herausforderungsaktivitäten wie angewiesen durchführen. |
Roboterfußball
Erfahren Sie, wie Sie einen Manipulator auf Ihrem Roboter erstellen, um als Roboterfußballspieler im Robot Soccer-Wettbewerb die meisten Tore zu greifen, zu passen und zu schießen. Sehen Sie sich hier die Robot Soccer STEM Lab-Einheit an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
Einfacher Klauenbot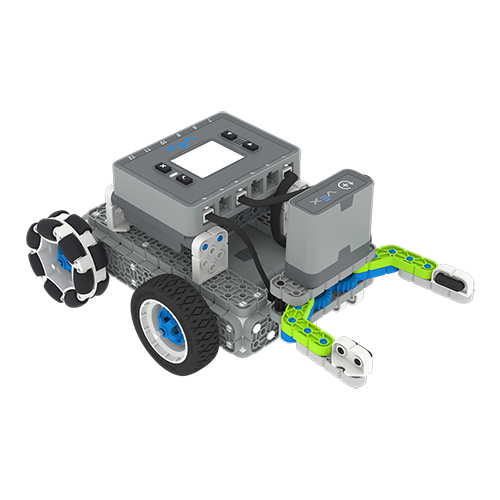
|
Clawbot IQ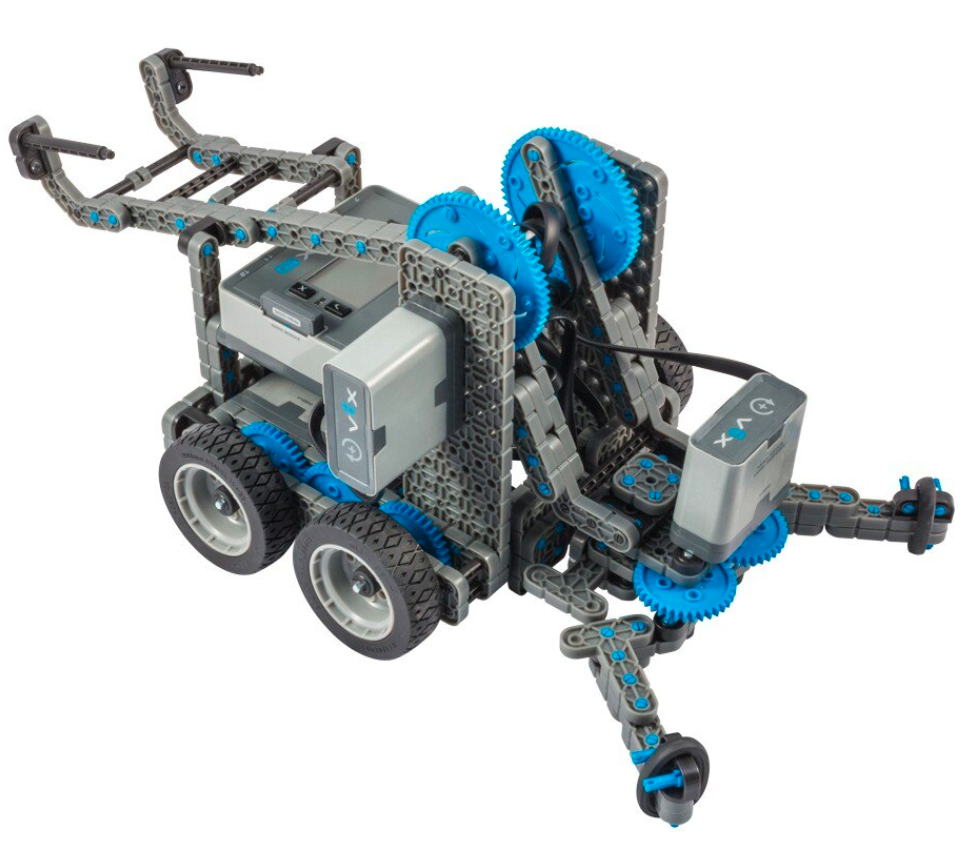
|
In Lektion 1 unterscheiden sich die Schritte zum Laden und Koppeln eines Controllers (1. Generation) geringfügig von den Anweisungen im Abschnitt „Vorbereitungen“. In diesem Abschnitt der STEM-Bibliothek finden Sie hilfreiche Informationen zum Laden und Koppeln eines Controllers (1. Generation). Verwenden Sie die Clawbot-Vorlage (Antriebsstrang 2 Motoren) der 1. Generation anstelle des einfachen Clawbots (Antriebsstrang 2 Motoren), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
|
Schatzsuche
Bauen und programmieren Sie den Simple Clawbot mit dem optischen Sensor, um rote Würfel zu erkennen und zu sammeln, um am Schatzsuche-Wettbewerb teilzunehmen. Sehen Sie sich hier die STEM-Laboreinheit „Schatzsuche“ an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
|
Einfacher Klauenbot
|
Clawbot IQ
|
Verwenden Sie die Clawbot-Vorlage (Antriebsstrang 2-Motor) (1. Generation) anstelle von Simple Clawbot (Antriebsstrang 2-Motor), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
Lassen Sie die Schüler zusätzlich zu den Lernvideos in Lektion 2 die folgenden Tutorials in VEXcode IQ ansehen. Die Klaue bewegen Den Arm bewegen |
Auf und ab
Erfahren Sie im Up and Over-Wettbewerb, wie Sie einen Clawbot entwerfen, der Würfel sammelt, aufnimmt und von einer Seite des Spielfelds zur anderen bewegt. Sehen Sie sich hier die Up and Over STEM Lab-Einheit an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
Klauenbot
|
Clawbot IQ
|
In Lektion 1 unterscheiden sich die Schritte zum Laden und Koppeln eines Controllers (1. Generation) geringfügig von den Anweisungen im Abschnitt „Vorbereitungen“. In diesem Abschnitt der STEM-Bibliothek finden Sie hilfreiche Informationen zum Laden und Koppeln eines Controllers (1. Generation). Verwenden Sie die Clawbot-Vorlage (Antriebsstrang 2-Motor) (1. Generation) anstelle von Clawbot (Antriebsstrang 2-Motor), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
|
Würfelsammler
Entdecken Sie den Unterschied zwischen Fahrersteuerung und autonomen Herausforderungen, während Sie lernen, den Clawbot zu steuern und ihn zu programmieren, um im Cube Collector-Wettbewerb Würfel zu sortieren und zu stapeln.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
| Klauenbot |
Clawbot IQ
|
In Lektion 1 unterscheiden sich die Schritte zum Laden und Koppeln eines Controllers (1. Generation) geringfügig von den Anweisungen im Abschnitt „Vorbereitungen“. In diesem Abschnitt der STEM-Bibliothek finden Sie hilfreiche Informationen zum Laden und Koppeln eines Controllers (1. Generation). Verwenden Sie die Clawbot-Vorlage (1. Generation) (Antriebsstrang 2 Motoren) anstelle des Clawbots (2. Generation) (Antriebsstrang 2 Motoren), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.
In Lektion 2 unterscheidet sich das Verfahren zum Zugreifen auf und Ausführen des Fahrersteuerungsprogramms auf einem Brain (1. Generation) geringfügig von den im Abschnitt „Lernen“ gezeigten Schritten. In diesem Artikel erfahren Sie, wie Sie das Fahrerkontrollprogramm mit einem Gehirn (1. Generation) ausführen und Ihre Schüler damit vertraut machen dieser Prozess. |
Schloss-Crasher
Erfahren Sie, wie Sie Schleifen programmieren, um Ihren Roboter zum Grooven zu bringen. Sehen Sie sich hier die STEM-Laboreinheit von Castle Crasher an.
| (2. Generation) Build | Empfohlener Build (1. Generation). | Anpassungen |
|---|---|---|
BaseBot mit Sensoren
|
Autopilot
|
Verwenden Sie die Vorlage „Autopilot (Antriebsstrang 2 Motor)“ anstelle der Vorlage „Basebot mit Sensoren (Antriebsstrang 2 Motor), wie in Lektion 1: Vorbereitungen zum Programmieren empfohlen.“
Der IQ-Abstandssensor (2. Generation) wird im Lernabschnitt von Lektion 2 vorgestellt. Sie können Informationen aus diesem (1. Generation) Abstandssensor-Artikel verwenden, um die Informationen für Ihre Schüler zu ergänzen. |