
Der in VRC Virtual Skills verwendete Roboter ist eine virtuelle Version von Disco, der VEX V5 Hero Bot, der für 2022 verwendet wird -2023 Start des VEX Robotics Competition (VRC). Virtual Disco hat die gleichen Abmessungen und Motoren wie die physische Disco, verfügt jedoch über zusätzliche Sensoren für die autonome Programmierung in VRC Virtual Skills. In VRC Virtual Skills gibt es nur einen Roboter und dieser ist bereits vorkonfiguriert. Dadurch entfällt die Notwendigkeit einer Roboterkonfiguration oder eines vordefinierten Vorlagenprojekts.
Robotersteuerung
Disco verfügt über die folgenden Steuerelemente:
Ein -Antriebsstrang. Dies ermöglicht der Blockkategorie „Antriebsstrang“ in der Toolbox von VEXcode V5, den Roboter anzutreiben und zu drehen.
Ein Einlass , der von der Intake Motor Group gesteuert wird. Dadurch kann der Roboter Scheiben einsammeln und punkten.
Der Einlass kann mit der Einlassmotorgruppe und dem Block [Spin for] gedreht werden. Wenn Sie die Motorgruppe in Richtung „Austritt“ drehen, werden die Scheiben in Richtung der Spielfeldplättchen bewegt, während Sie durch Drehen in Richtung „Eintritt“ Scheiben in die Luft schleudern können, um beim High Goal zu punkten.
Oben am Einlass befindet sich ein Satz aus zwei Rädern. Mit ihnen lassen sich die Walzen drehen.
Durch Drehen der Ansaugmotorgruppe, während die Räder die Walze berühren, dreht sich die Walze und ändert ihre Farbe.
Robotersensoren
Virtual Disco hat Sensoren für die autonome Programmierung in VRC Virtual Skills hinzugefügt.
Trägheitssensor
Der Trägheitssensor wird mit dem Antriebsstrang verwendet, damit Disco mithilfe der Antriebsstrangrichtung genaue und präzise Kurven fahren kann.
Die Richtung des Antriebsstrangs meldet einen Wert von 0 bis 359,9 Grad und im Uhrzeigersinn ist positiv.
Weitere Informationen zum Trägheitssensor finden Sie in diesem Artikel aus der VEX-Bibliothek.
Abstandssensor
Auf der Vorderseite von Virtual Disco befindet sich ein Distanzsensor .
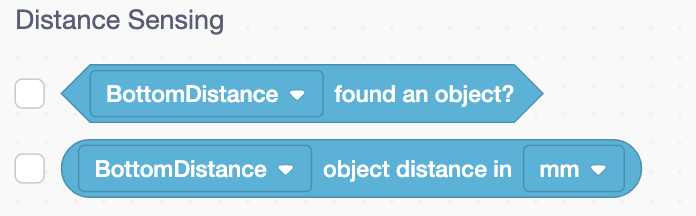
Der Distanzsensor meldet, ob sich ein Objekt in der Nähe des Sensors befindet, sowie die ungefähre Entfernung von der Vorderseite des Sensors zu einem Objekt in Millimetern oder Zoll.
Der Abstandssensor an der Vorderseite von Disco kann verwendet werden, um festzustellen, ob sich eine Scheibe vor dem Einlass befindet oder wie weit die Scheiben auf dem Spielfeld ungefähr vom Sensor entfernt sind.
Weitere Informationen zum V5-Abstandssensor finden Sie in diesem VEX-Bibliotheksartikel.
Linienverfolger
Die drei Line Tracker befinden sich entlang der Unterseite des Disco-Einlasses. Damit lässt sich die Position der Scheiben innerhalb der Aufnahme ermitteln und feststellen, wie viele Scheiben sich aktuell in der Aufnahme befinden.
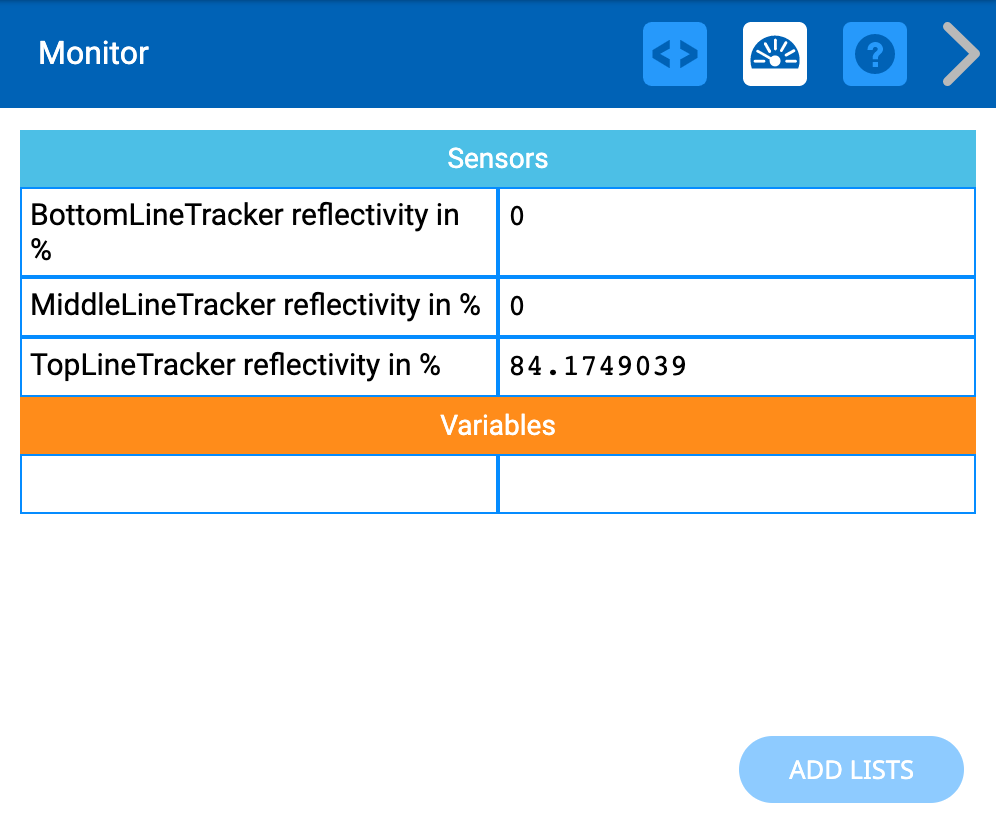
Line-Tracker sind ein 3-Draht-Sensor bestehend aus einer Infrarot-LED und einem Infrarot-Lichtsensor. Sie messen das Reflexionsvermögen der Oberfläche. Bei der Codierung von Line Trackern ist es wichtig, die unterschiedlichen Reflexionswerte zu verstehen, die je nach Umgebung gemeldet werden. In diesem Beispiel befindet sich derzeit eine Disc oben im Einlass, sodass der Top Line Tracker einen höheren Reflexionswert meldet.
Weitere Informationen zu VEX V5 Line Trackern finden Sie in diesem Artikel.
Weitere Informationen zur Überwachung von Sensorwerten in einem VRC Virtual Skills-Projekt (hier im Bild gezeigt) finden Sie in diesem Artikel.
Optischer Sensor
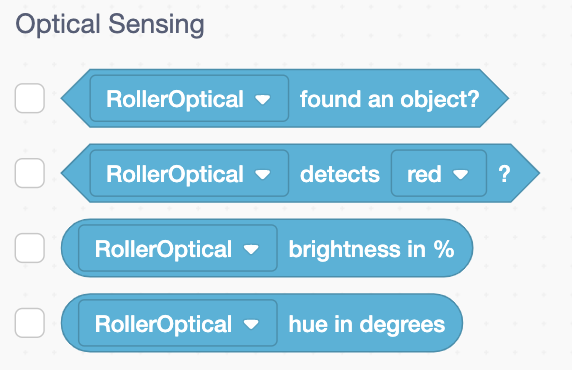
Der Optical Sensor meldet, ob sich ein Objekt in der Nähe des Sensors befindet und wenn ja, welche Farbe dieses Objekt hat.
Der optische Sensor kann auch die Helligkeit und den Farbtonwert eines Objekts in Grad melden.
Der optische Sensor befindet sich oben auf Disco in der Nähe der Räder. Dieser Sensor wird auf der Höhe der Walzen positioniert und dient zur Bestimmung der Farbe jeder Walze
Weitere Informationen zum optischen Sensor finden Sie in diesem Artikel der VEX-Bibliothek.
Game Positioning System (GPS)-Sensor
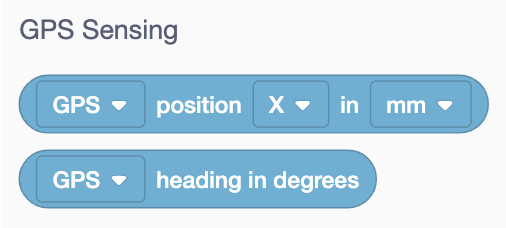
Der GPS-Sensor kann die aktuelle X- und Y-Position des Rotationszentrums von Disco in Millimetern oder Zoll melden.
Der GPS-Sensor kann auch den aktuellen Kurs in Grad melden.
Der GPS-Sensor befindet sich in der Nähe der Rückseite von Disco und wird verwendet, um die Position und Ausrichtung des Roboters auf dem Feld zu bestimmen, indem er die GPS-Feldcodestreifen entlang des Innenumfangs des Feldes liest.
Sie können den GPS-Sensor verwenden, um Disco dabei zu helfen, sich auf dem Spielfeld zurechtzufinden, indem Sie mithilfe Ihrer Kenntnisse des kartesischen Koordinatensystems zu bestimmten Orten fahren.
Mithilfe des GPS-Sensors kann Disco entlang der X- oder Y-Achse fahren, bis der Wert des Sensors größer oder kleiner als ein Schwellenwert ist. Dadurch kann Disco mit Sensor-Feedback statt mit festgelegten Distanzen fahren.
Weitere Informationen zum Identifizieren von Standortdetails in VRC Virtual Skills mithilfe des GPS-Sensors finden Sie in diesem Artikel der VEX-Bibliothek.