This article is not viewable in your language. Please check back at a future date.
Die Übersetzung dieses Artikels wurde durch maschinelle Übersetzung vervollständigt. Bitte verzeihen Sie eventuelle Fehler.
Sensoren bieten einem Roboter die Möglichkeit, Feedback von der Umgebung zu erhalten. Es gibt eine Vielzahl von VEX IQ-Sensoren (1. Generation), die verwendet werden können, um verschiedene Arten von Eingaben für den Roboter zu erhalten. Die folgende Tabelle bietet einen Überblick darüber, was jeder Sensor kann, und Beispiele dafür, wie er in einem Projekt verwendet werden kann.
VEX IQ (1. Generation) Sensor-Vergleichstabelle
| Sensor |
Funktion |
Anwendungsbeispiele |
|
Stoßstangenschalter
|
- Teilt dem Roboter mit, ob sein Stoßfänger gedrückt (Sensorwert 1) oder losgelassen (Sensorwert 0) ist.
|
- Erkennt, ob der Roboter gegen ein Objekt gestoßen ist, beispielsweise gegen eine Labyrinthwand oder ein Spielobjekt
- Auslösen einer Roboteraktion durch Drücken oder Loslassen.
- Durch Drücken können Sie die Motoren ein- oder ausschalten.
- Erkennen anderer Teile des Roboters, beispielsweise eines Arms, wenn dieser auf den Stoßfänger drückt.
|
|
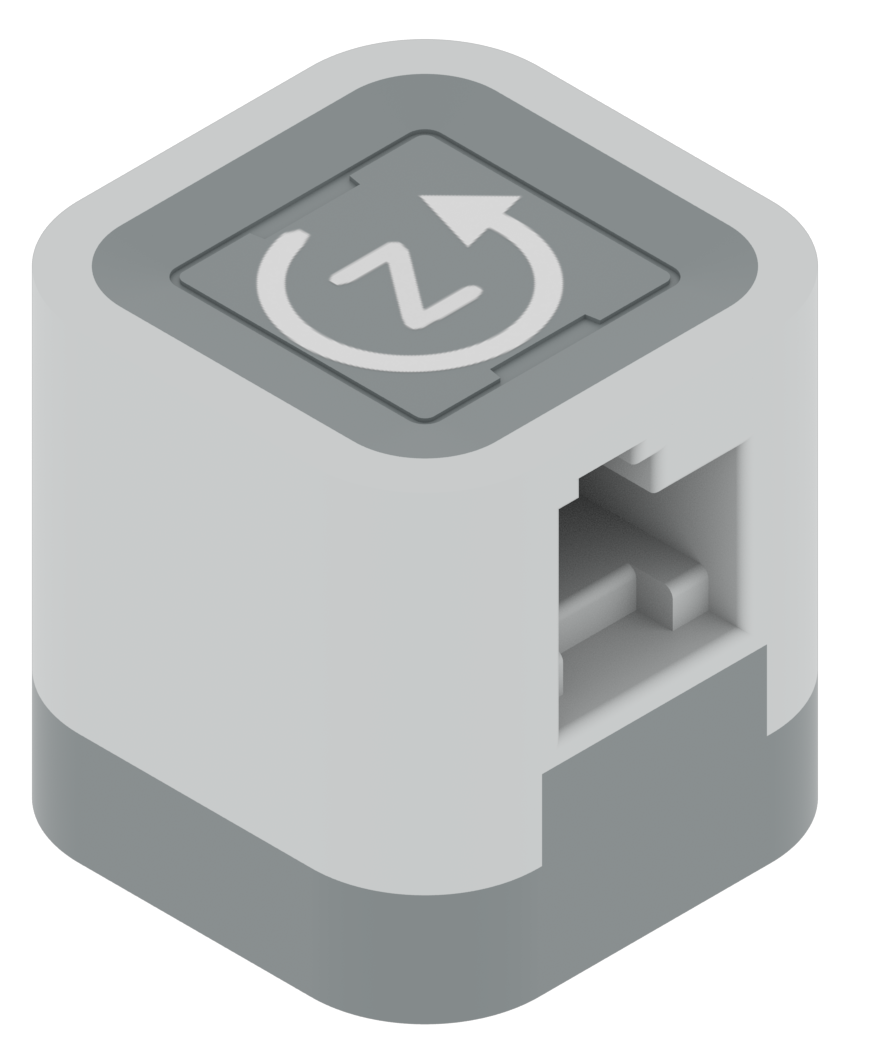
Touch-LED

|
- Kann kapazitive Berührungen erkennen, z. B. die Berührung eines Fingers.
- Kann so eingestellt werden, dass viele Farben angezeigt werden.
|
- Bei Berührung wird eine Roboteraktion ausgelöst
- Durch Berühren starten oder pausieren Sie ein Programm
- Anzeige unterschiedlicher Farben in verschiedenen Teilen eines Programms, sodass Code zur Fehlerbehebung leichter lokalisiert werden kann.
|
|
Farbsensor
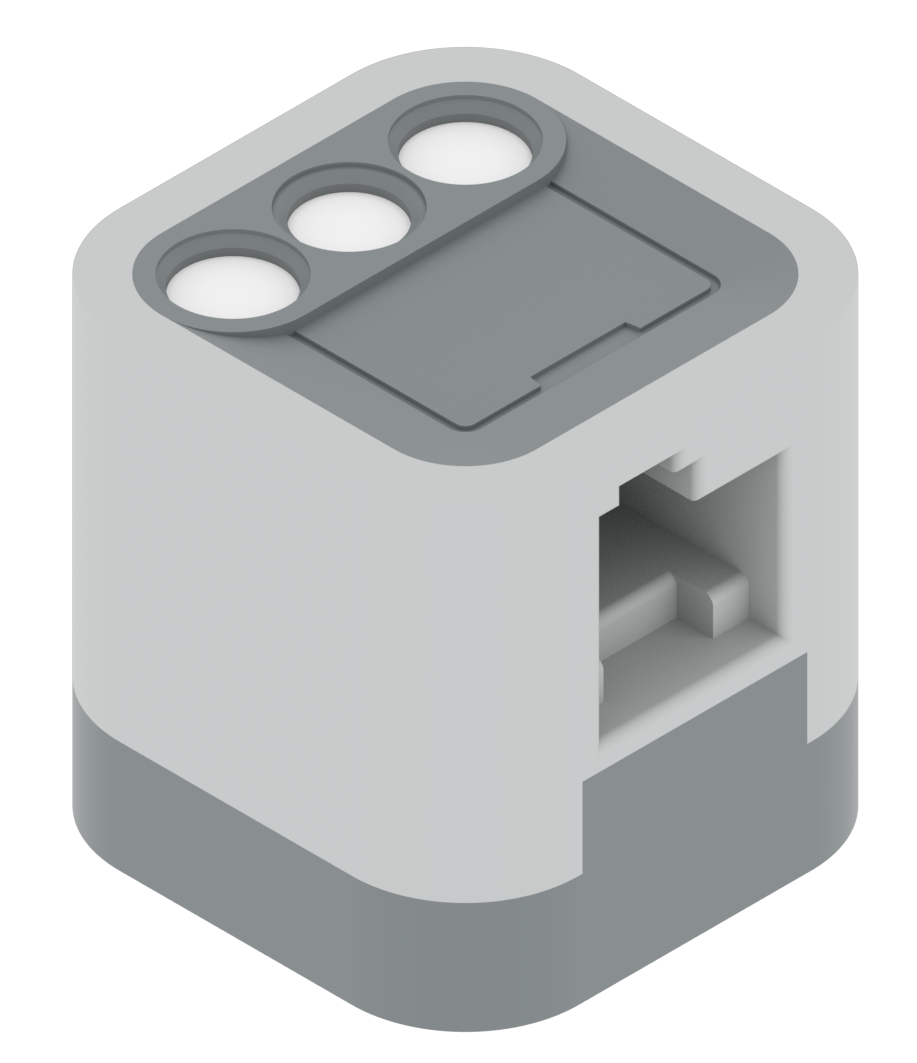
|
-
Verwendet reflektiertes Licht, um ein Objekt zu erkennen
- Farbe
- Farbtonwert
- Graustufenwert
- Helligkeit
- Nähe.
|
- Interaktion mit einem Element einer bestimmten Farbe, beispielsweise beim Sortieren von Objekten nach Farbe.
- Bestimmen des numerischen Farbtonwerts eines farbigen Objekts. Diese Daten können bei der Fehlerbehebung des Farbsensors bei unterschiedlichen Lichtverhältnissen hilfreich sein.
- Verstehen, wie der Sensor Farben bei unterschiedlichen Lichtverhältnissen erkennt.
- Erkennen einer Linie
- Erkennen, ob ein Objekt vorhanden ist
|
|
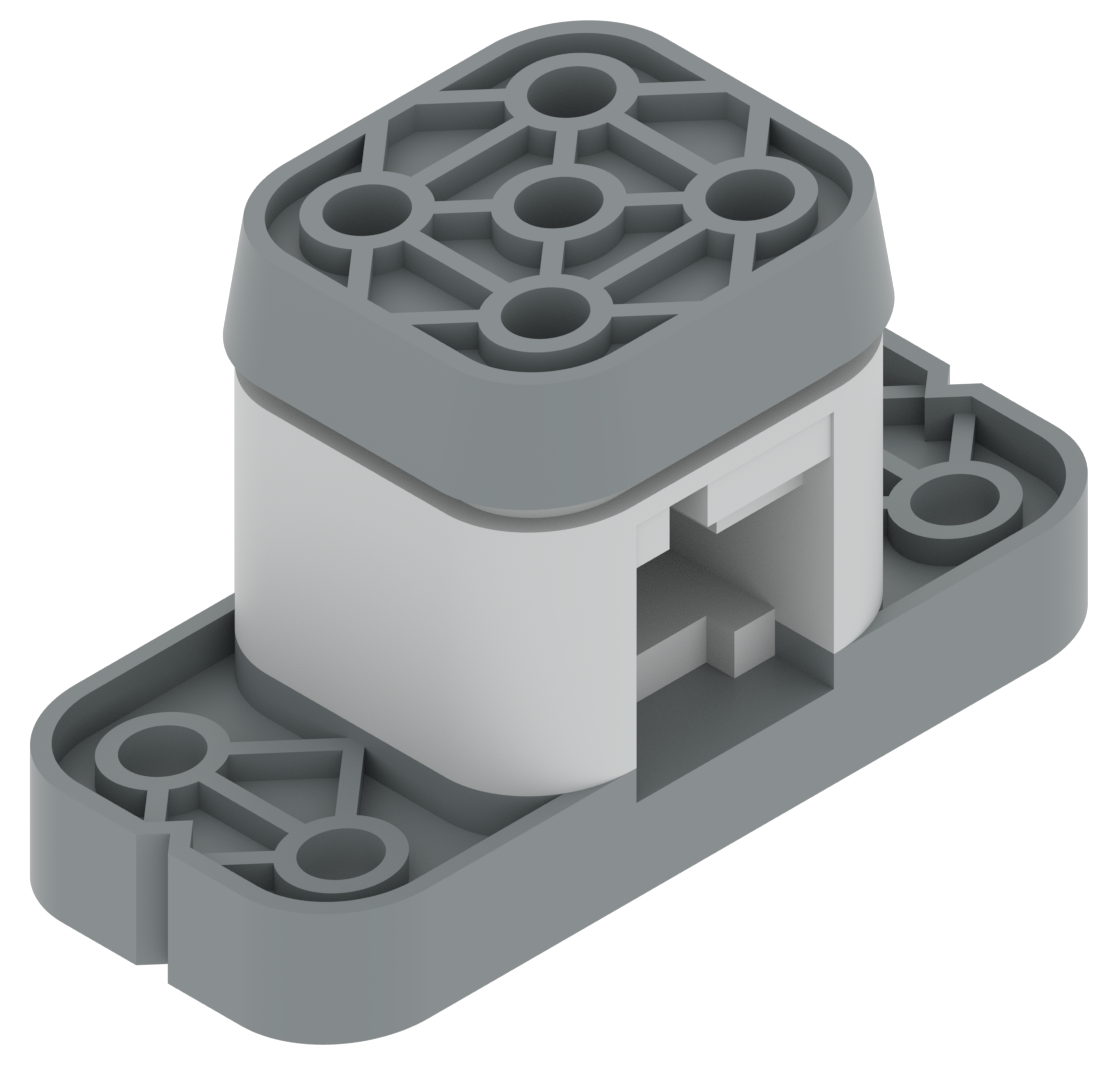
Gyrosensor
|
- Erkennt die Geschwindigkeit und Rotation des Roboters
|
- Geradeaus fahren
- Präzise Kurven fahren
|
|
Abstandssensor
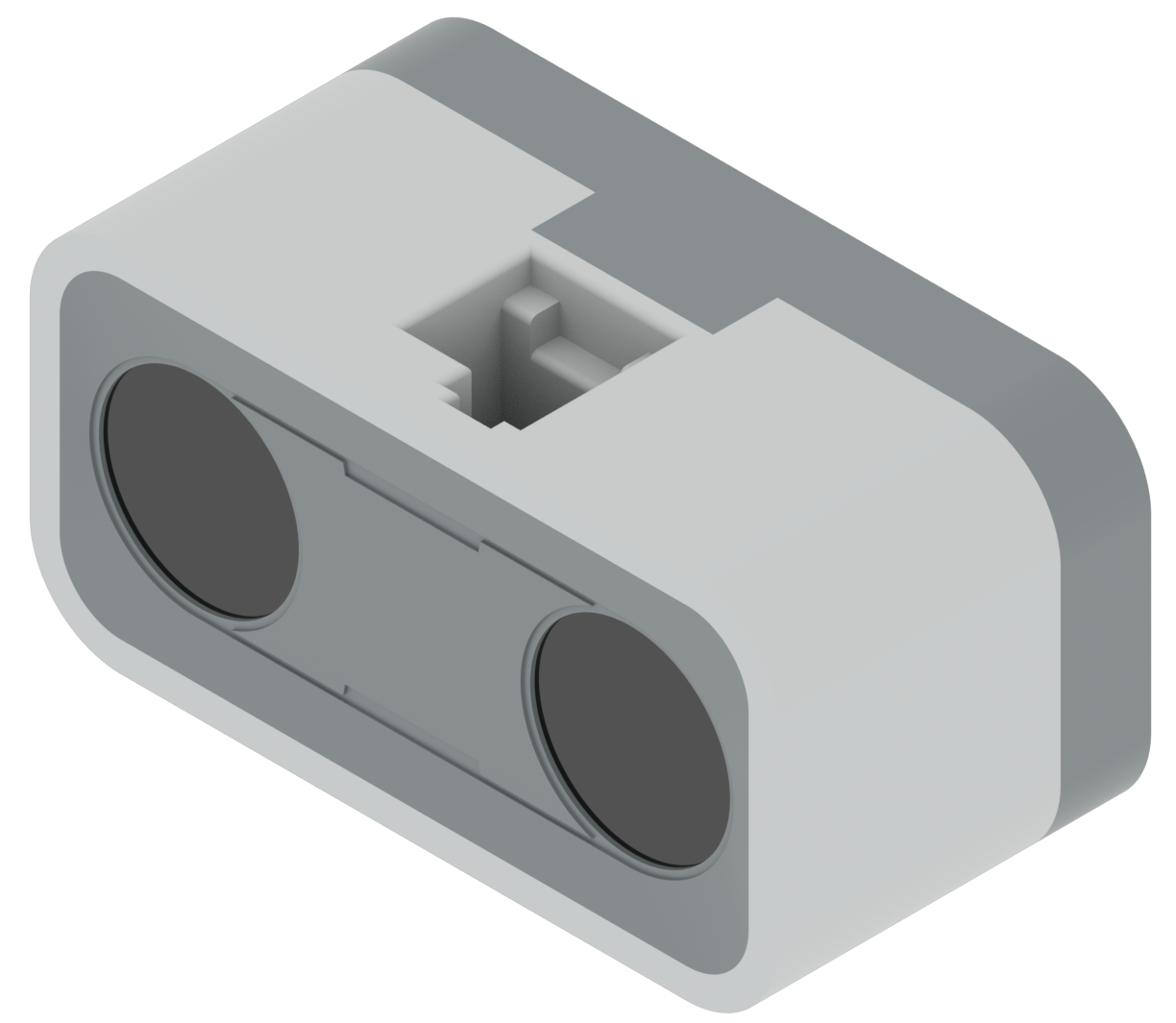
|
- Erkennt, ob sich ein Objekt davor befindet
- Misst den Abstand zwischen sich selbst und einem Objekt
|
- Fahren bis zu einem bestimmten Abstand vor einem Objekt, beispielsweise einer Wand oder einem Spielobjekt
- Fahren Sie vorwärts, bis es erkennt, dass es einen bestimmten Abstand von einer Wand hat, und halten Sie dann an.
- Zu einem Gegenstand fahren, um ihn aufzunehmen.
- Wegfahren von einem Objekt oder einer Oberfläche, bis eine bestimmte Entfernung erreicht ist.
|
Zusätzliche Sensorinformationen
Ausführliche Informationen zu den oben genannten Sensoren finden Sie in den folgenden Artikeln:
