This article is not viewable in your language. Please check back at a future date.
本文的翻譯是透過機器翻譯完成的。請原諒任何可能的錯誤。
雖然 EXP STEM 實驗室單元是為 VEX EXP 套件設計的,並遵循學習 - 實踐 - 競爭的格式,但使用 V5 套件教授這些 STEM 實驗室的方法有很多。 在本文中,我們為您提供了幫助您適應 EXP STEM 實驗室的資源,使您能夠靈活地教授 V5 和 EXP STEM 實驗室單元。
若要了解如何將 EXP 和 V5 STEM 實驗室合併到課堂中, 請參閱此 V5 累積進度指南。
使用 V5 套件教授 EXP STEM 實驗室單元時的整體注意事項
V5 機器人的佔地面積比 EXP 機器人更大。 在建立練習和挑戰場地時,您可能需要增加場地的大小,以便 Clawbot 或 Speedbot 有足夠的空間進行導航。 以下將針對每個單元提供更大的欄位大小的建議。 這些可以使用 VEX V5 Field Tiles 或在相同尺寸的地板上使用膠帶創建。
介紹課
每個 STEM 實驗室單元的第 1 課涵蓋單元結束時的競賽介紹以及檢查電池和控制器上的電池電量以及準備使用 VEXcode EXP。 使用以下文章了解如何檢查 V5 電池電量並準備使用 VEXcode V5。
以下部分標識了 EXP STEM 實驗室、用於該單元的 EXP 版本以及可用於完成練習和挑戰活動的兼容 V5 版本。 也包括調整每個單元內的競賽的建議。
團隊凍結標籤
在本單元中,您將使用控制器驅動 BaseBot、選擇車輪並添加感測器來參加 Team Freeze Tag 競賽! 請參閱此處的團隊凍結標籤單元。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
機器人
|
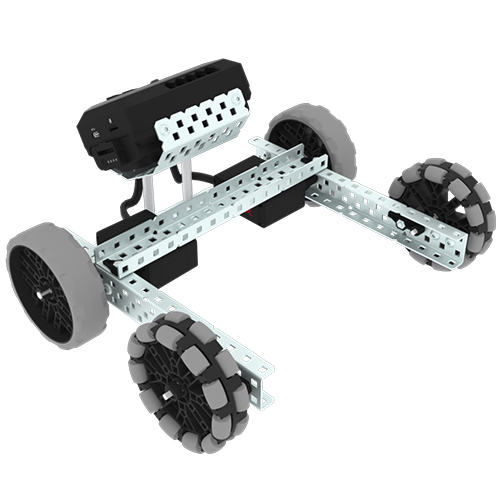
速度機器人
|
- 對於所有活動,建議使用 6 英尺 x 8 英尺(~180 公分 x 240 公分)的場地,以便機器人有更多的導航空間。
- 所有使用巴基球的活動都可以替換為其他圓形遊戲元素或大致相同尺寸(直徑 4 英寸/10 厘米)的教室物體。
- 第 3 課:V5 入門套件有兩種車輪類型(全向輪和 4 吋旅行輪)。 在練習活動中使用這些。
- 第 4 課:在機器人前部添加 C 型通道以幫助標記。 保險桿開關可以安裝在機器人背面電池上方的 C 形通道上。
|
機器人足球
在本單元中,您將探索如何在機器人上創建一個操縱器,以作為機器人足球員在機器人足球比賽中抓取、傳球和進球最多! 請參閱此處的機器人足球隊。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
爪形機器人
|
爪形機器人
|
- 所有使用巴基球的活動都可以替換為其他圓形遊戲元素或大致相同尺寸(直徑 4 英寸/10 厘米)的教室物體。
- 第 3 課:對於練習和挑戰活動,建議使用 4' x 6'(~120cm x 180cm)。
- 對於機器人足球比賽,建議使用 6 英尺 x 8 英尺(~180 公分 x 240 公分)的場地,以便機器人有更多的導航空間。
|
向上和向上
在本單元中,您將探索如何設計一個爪形機器人來收集、撿起巴基球並將其從場地的一側移動到比賽的另一側! 請參閱此處的向上和向上單元。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
爪形機器人
|
爪形機器人
|
- 對於所有練習和挑戰活動,建議使用 4 英尺 x 6 英尺(~120 公分 x 180 公分)的場地。
- 所有使用巴基球的活動都可以替換為其他圓形遊戲元素或大致相同尺寸(直徑 4 英寸/10 厘米)的教室物體。 這些也可以替換為方形遊戲元素來堆疊,而不是將巴基球堆疊在環上。
- 第 4 課:要建立屏障,您可以使用套件中的額外金屬或其他課堂材料(例如紙板)。 障礙物高度應為 4-5 英吋(約 10-12 公分),橫跨場地寬度。
- 對於Up and Over 比賽,建議使用 6' x 8'(~180cm x 240cm)的場地,以便機器人有更多的導航空間。
|
城堡破壞者
在本單元中,您將探索如何使用光學和距離感測器來尋找、撞擊和清除巴基球“城堡”,以便在 Castle Crasher 比賽中得分! 請參閱此處的城堡破壞者單位。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
機器人
|
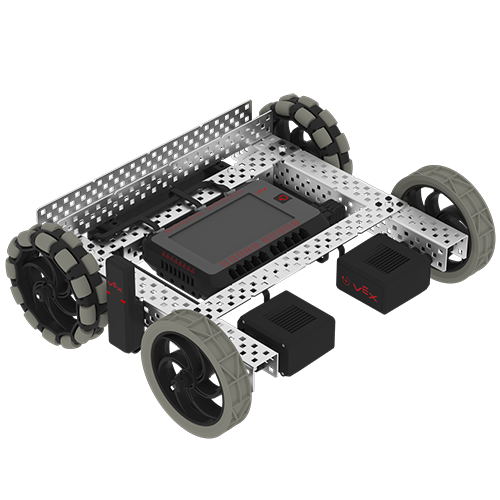
速度機器人
|
- 對於所有練習和挑戰活動以及城堡破壞者比賽,建議使用 4 英尺 x 4 英尺(約 120 公分 x 120 公分)的凸起場地。
- 您可能需要將尺寸增加到 5 英尺 x 5 英尺(約 150 公分 x 150 公分),以便機器人有更多空間在場地中導航。
- 所有使用巴基球的活動都可以替換為其他圓形遊戲元素或大致相同尺寸(直徑 4 英寸/10 厘米)的教室物體。 這些也可以替換為方形遊戲元素來堆疊,而不是創建巴基球堆疊。
- 第 3 課和第 4 課提供了距離感測器和光學感測器的建議安裝位置。 在 Speedbot 的前面添加一個 C 通道,用作感測器的安裝位置。
|
尋寶
在本單元中,您將使用光學感測器建構和編碼 Clawbot,以識別和收集紅色巴基球,以參加尋寶比賽! 請參閱此處的尋寶單元。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
爪形機器人
|
爪形機器人
|
- 對於所有練習和挑戰活動以及尋寶比賽,建議使用 3 英寸 x 5 英寸(~90 厘米 x 150 厘米)的場地,並從遠端拆除一堵牆,為“主場區”創造一個開口.'
- 您可能需要將尺寸增加到 4 英尺 x 6 英尺(約 120 公分 x 180 公分),以便機器人有更多空間在場地中導航。
- 所有使用巴基球的活動都可以替換為其他圓形遊戲元素或大致相同尺寸(直徑 4 英寸/10 厘米)的教室物體。
|
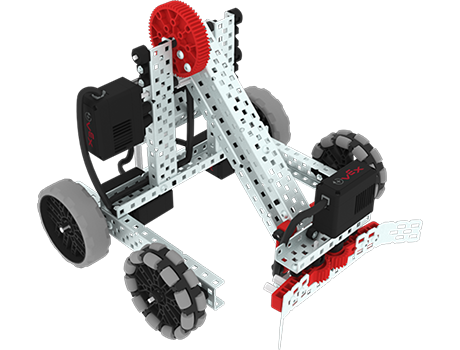
圓環首領
在本單元中,您將探索駕駛員控制和自主運動之間的區別,因為您使用多個程式(自主和駕駛員控制)以便在環領比賽中在不同尺寸的柱子上得分! 請參閱此處的環領導單元。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
爪形機器人
|
爪形機器人
|
- 對於所有練習和挑戰活動以及領隊比賽,建議使用 3 英尺 x 5 英尺(~90 公分 x 150 公分)的場地,並附有各種尺寸的柱子。
- 這些帖子是使用連接在一起的 C 通道創建的。 您可以使用以下詳細資訊透過 V5 套件重新建立柱子,或使用其他教室物件建立類似高度的柱子。
- 小柱子是一個 1x2x1x8 C 型通道,垂直連接到場地(約 100 毫米高)。
- 中型柱是一個 1x2x1x8 C 型槽鋼和一個 1x2x1x12 C 型槽鋼,垂直連接到場地(約 250 毫米高)。
- 大柱由兩個 1x2x1x8 C 型槽鋼和一個 1x2x1x12 C 型槽鋼垂直連接到場地(約 350 毫米高)。
- 所有使用圓環的活動都可以替換為其他圓形遊戲元素或大小大致相同(直徑 4 英寸/10 厘米)且具有可放置在柱子上的中心孔的教室物體。
|
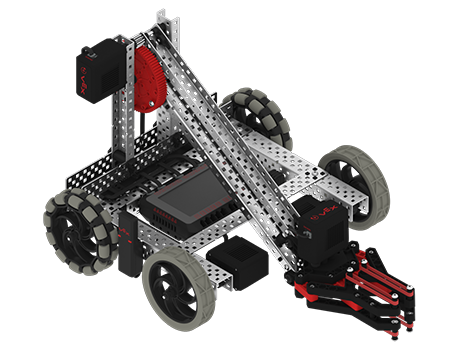
平台放置者
在本單元中,您將探索機械手設計,包括升降機,以驅動機器人將環和巴基球放置在不同高度的平台上以得分。 在環領隊比賽中,團隊將齊心協力,為兩個機器人團隊制定遊戲策略,力求贏得比賽! 請參閱此處的平台放置單元。
| 經驗建構 |
推薦的 V5 版本 |
改編 |
爪形機器人
|
爪形機器人
|
- 對於第 2 課和第 3 課的練習和挑戰活動以及第 4 課的練習活動,建議您使用帶有牆壁(約 120 厘米 x 120 厘米)並附有平台的 4 英尺 x 4 英尺場地。
- 對於第 4 課的挑戰活動,建議您使用 4 英尺 x 6 英尺、有牆壁(約 120 公分 x 180 公分)並附有平台的場地。
- 對於平台放置比賽,建議您使用 6 英尺 x 6 英寸的場地,有牆壁(約 180 厘米 x 180 厘米)並附有平台。
- 該平台是使用套件和場地塊中的任何附加金屬零件創建的。 您可以使用以下詳細資訊透過 V5 套件重新建立平台,或使用其他教室物件建立類似高度的平台。
- 建議將中型平台抬高到距離場地約 20 公分或 8 英吋的位置。
- 建議將高平台抬高到離場地約 40.5 公分或 16 英吋的高度。
- 所有使用圓環的活動都可以替換為其他圓形遊戲元素或具有大致相同尺寸(直徑 4 英寸/10 厘米)且帶有中心孔的教室物體。
|
