
虽然VEX IQ(第二代)STEM实验室是为IQ(第二代)套件设计的,但也有很多方法可以用你的(第一代)套件来教授(第二代)STEM实验室。 在本文中,我们为你提供了帮助适应(第二代)STEM 实验课的资源,让你可以灵活地使用 IQ(第一代)套装教授所有 IQ STEM 实验课。
使用(第一代)套件进行(第二代)STEM实验单元教学时的总体考虑
每个IQ(第二代)STEM实验室单元都是围绕着STEM课堂竞赛而展开的。 单元课程遵循可预测的 "学习--实践--竞争 "格式,并有一个总结课程,将学生的学习与现实生活中的STEM职业联系起来。 调整的主要部分是需要介绍性课程中推荐的构建和模板,以及对学习和实践资源的一些小的调整,以适应(第一代)构建的使用。
- 关于IQ(第二代)STEM实验室单元格式的更多信息,请看这篇文章。
- 请参阅STEM图书馆本节中的文章,以获得建立和促进STEM实验室竞赛的支持。
在每个(第二代)STEM实验单元的第1课中,要求学生检查并给他们的电池充电,为单元活动做准备。 对于(第 1 代)电池,程序是不同的。
- 请参阅 STEM 库 这一部分中的文章,了解有关检查和为(第一代)电池充电的说明。
以下部分列出了每个第二代STEM实验室单元,该实验室使用的IQ(第二代)构建,以及你可以用来完成实验室活动的兼容IQ(第一代)构建。 还包括适应每节实验课‘Play’部分的建议。
- 选择搭建名称以在新窗口中打开搭建说明。
拔河
探索机械优势和质量中心如何影响你的机器人拉动物体的能力,并设计最好的机器人来赢得拔河比赛。 在此处查看拔河 STEM 实验室单元。
| (第二代)搭建 | 推荐(第一代)搭建 | 调整 |
|---|---|---|
BaseBot
|
自动驾驶
|
按照《第1课:准备编程》中的建议,使用自动驾驶仪(传动系2号电机)模板,而不是Basebot(传动系2号电机)模板。
在第2课和第3课的练习和挑战活动中,建议使用重约1和2公斤(约2和4磅)的教室物品代替IQ储存箱。 |
赛队冻结标签
你可以使用IQ控制器驾驶你的机器人,测试你的驾驶技巧,选择车轮,并添加传感器,在团队冻结标签比赛中竞争。 在此处查看 Team Freeze Tag STEM 实验室单元。
| (第二代)搭建 | 推荐的(第一代)搭建 | 调整 |
|---|---|---|
|
BaseBot
|
自动驾驶
|
在第一课中,为(第一代)控制器充电和配对的步骤与 "准备 "部分的指示说明略有不同 请参阅 STEM 库的此部分 ,了解有关如何为(第一代)控制器充电和配对的有用信息。 按照《第1课:准备编程》中的建议,使用自动驾驶仪(传动系2号电机)模板,而不是Basebot(传动系2号电机)模板。
在第2课中,在(第一代)大脑上访问和运行驱动控制程序的程序与学习部分显示的步骤略有不同。 请参阅这篇文章 ,让你的学生熟悉使用(第一代)大脑运行驱动程序控制程序的步骤这一过程。 第4课让学生在他们的机器人上添加一个IQ保险杠开关,然而自动驾驶仪的后面已经安装了两个 让学生取下一个保险杠开关,将剩余的保险杠放在中间,按照指示进行练习和挑战活动。 |
机器人足球
探索如何在你的机器人上创建一个操纵器,以便在机器人足球比赛中作为机器人足球运动员抓取、传球并获得最多进球。 在此处查看机器人足球 STEM 实验室单元。
| (第二代)搭建 | 推荐(第一代)搭建 | 适应性 |
|---|---|---|
简单爪形机器人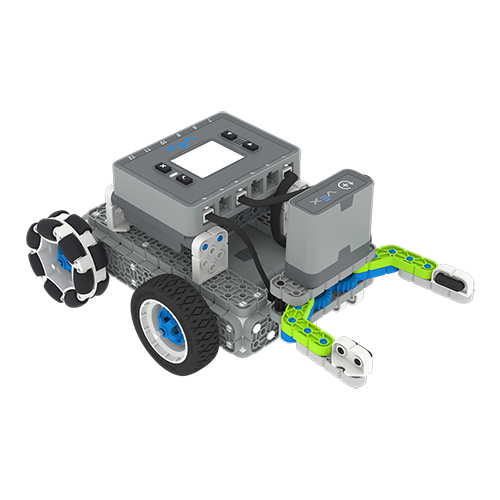
|
IQ 钳爪机器人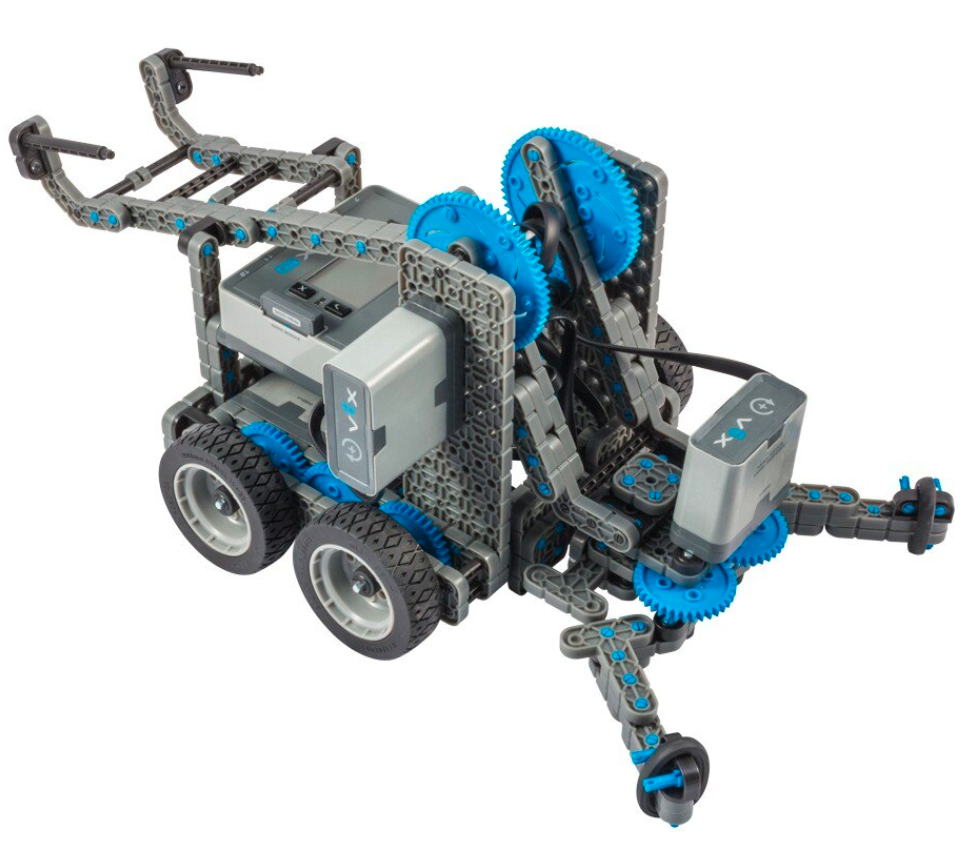
|
在第一课中,为(第一代)控制器充电和配对的步骤与 "准备 "部分的指示略有不同。 请参阅 STEM 库的此部分 ,了解有关如何为(第一代)控制器充电和配对的有用信息。 使用(第一代)钳爪机器人(底盘 2-motor)模板,而不是第1课:准备编程中建议的简单 钳爪机器人(底盘 2-motor)。
|
寻宝
用光学传感器建立和编码简单的钳爪机器人,识别和收集红色方块,参加寻宝比赛。 在此处查看寻宝 STEM 实验室单元。
| (第二代)搭建 | 推荐(第一代)搭建 | 适应性 |
|---|---|---|
|
简单爪形机器人
|
IQ 钳爪机器人
|
使用(第一代)钳爪机器人(Drivetrain 2-motor)模板,而不是第1课:准备编程中建议的简单钳爪机器人(Drivetrain 2-motor)。
除了第2课的学习视频,让学生在VEXcode IQ中观看以下教程 移动爪子 移动手臂 |
上上下下
在 Up and Over 比赛中,探索如何设计一个 Clawbot 来收集、拾取并将立方体从场地的一侧移动到另一侧。 在此处查看 Up and Over STEM 实验室单元。
| (第二代)搭建 | 推荐(第一代)搭建 | 调整 |
|---|---|---|
钳爪机器人
|
IQ 钳爪机器人
|
在第一课中,为(第一代)控制器充电和配对的步骤与 "准备 "部分的指示略有不同。 请参阅 STEM 库的此部分 ,了解有关如何为(第一代)控制器充电和配对的有用信息。 使用(第一代)钳爪机器人(Drivetrain 2-motor)模板,而不是第1课:准备编程中建议的钳爪机器人(Drivetrain 2-motor)。
|
立方体收集器
当你学会驾驶钳爪机器人,并在立方体收集器比赛中用代码对立方体进行分类和堆叠时,你将探索驾驶员控制和自主挑战之间的区别。
| (第二代)搭建 | 推荐(第一代)搭建 | 调整 |
|---|---|---|
| 钳爪机器人 |
IQ 钳爪机器人
|
在第 1 课中,为(第一代)控制器充电和配对的步骤与“准备就绪”部分中的说明略有不同。 请参阅 STEM 库的此部分 ,了解有关如何为(第一代)控制器充电和配对的有用信息。 使用(第一代)钳爪机器人(Drivetrain 2-motor)模板,而不是(第二代)钳爪机器人(Drivetrain 2-motor),如第1课:准备编程中所建议的。
在第2课中,在(第一代)大脑上访问和运行驱动控制程序的程序与学习部分显示的步骤略有不同。 请参阅这篇文章 ,了解使用(第一代)大脑运行驾驶员控制程序并让您的学生熟悉这个流程。 |
捣毁城堡
学习如何编写循环代码,以使你的机器人发挥其作用。 在此处查看 Castle Crasher STEM 实验室单元。
| (第二代)搭建 | 推荐(第一代)搭建 | 调整 |
|---|---|---|
带传感器的基地机器人
|
自动驾驶
|
按照第 1 课:准备编码中的建议,使用 Autopilot(传动系统 2 电机)模板而不是带传感器的 Basebot(传动系统 2 电机)模板。
第 2 课学习部分介绍了 IQ(第 2 代)距离传感器。 您可以使用 这篇(第 1 代)距离传感器文章 中的信息来为您的学生补充信息。 |