
VRC 虚拟技能 中使用的机器人是 Disco 的虚拟版本,VEX V5 Hero Bot,用于 2022 年-2023 VEX 机器人大赛 (VRC) 启动。 虚拟迪斯科具有与物理迪斯科相同的尺寸和电机,但增加了用于 VRC 虚拟技能中自主编程的传感器。 VRC Virtual Skills中只有一个机器人,而且已经预先配置好了。 这消除了对机器人配置或预定模板项目的需要。
机器人控制
Disco 具有以下控件:
传动系统。 这使得 VEXcode V5 工具箱中的“传动系统”类别的块能够驱动和转动机器人。
由进气电机组控制的 进气 。 这使得机器人能够收集光盘并进行刻划。
可以使用进气电机组和 [Spin for] 块来旋转进气。 朝“出风”方向旋转电机组会将圆盘移向场地方块,而沿“进风”方向旋转则可让您将圆盘发射到空中以在高目标中得分。
入口顶部有一组两个轮子。 这些可用于旋转滚筒。
当车轮接触滚轮时,通过旋转进气电机组,滚轮将旋转并改变颜色。
机器人传感器
Virtual Disco 在 VRC Virtual Skills 中添加了用于自主编程的传感器。
惯性传感器
惯性传感器 与动力传动系统配合使用,使 Disco 能够利用动力传动系统航向进行精确转弯。
传动系统航向报告的值范围为 0 到 359.9 度,顺时针方向为正。
有关惯性传感器的更多信息, 查看 VEX 库中的这篇文章。
距离传感器
Virtual Disco 正面有一个 距离传感器 。
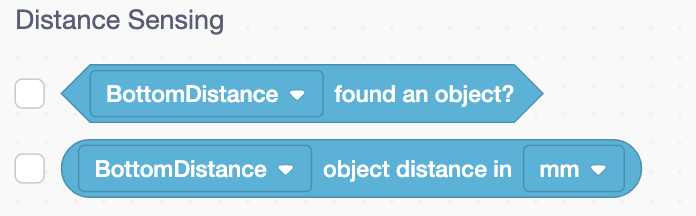
距离传感器报告物体是否靠近传感器,以及从传感器前端到物体的大致距离(以毫米或英寸为单位)。
Disco 前面的距离传感器可用于确定圆盘是否位于入口前方,或者圆盘在场地上距传感器的大约距离。
有关 V5 距离传感器的更多信息, 请参阅此 VEX 库文章。
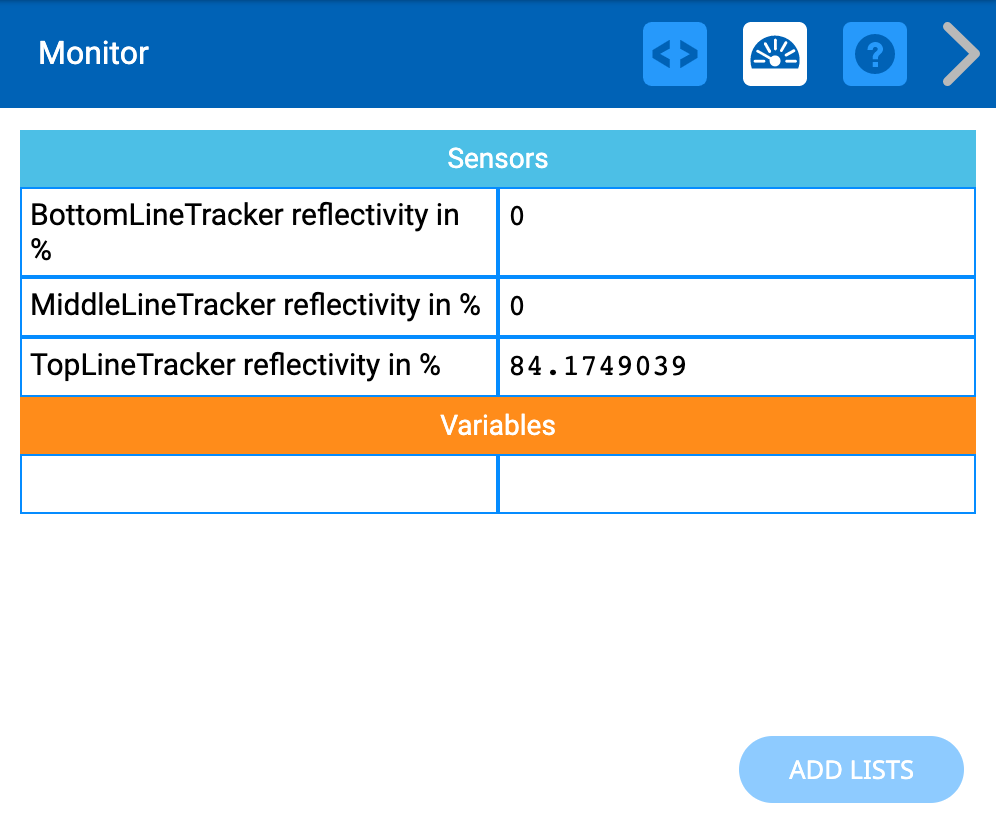
线路追踪器
三个 线路跟踪器 位于迪斯科入口的底部。 这些可用于检测进气口内圆盘的位置,并确定进气口中当前容纳有多少个圆盘。
光学传感器
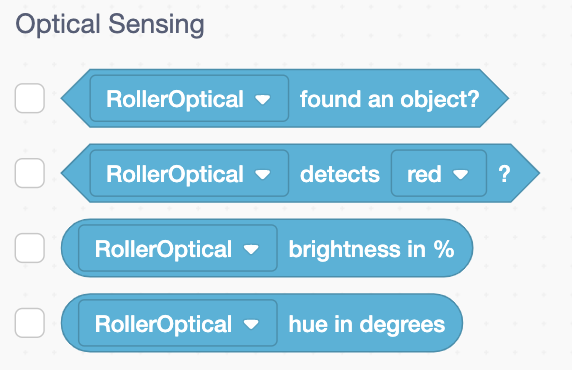
光学传感器r 报告物体是否靠近传感器,如果靠近,则该物体是什么颜色。
光学传感器还可以报告物体的亮度和色调值(以度为单位)。
光学传感器位于迪斯科顶部靠近车轮的位置。 该传感器位于滚筒的高度处,用于确定每个滚筒的颜色
有关光学传感器的更多信息, 请参阅此 VEX 库文章。
游戏定位系统 (GPS) 传感器
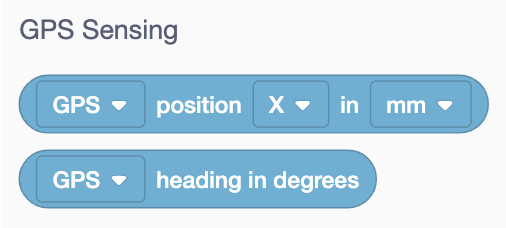
GPS 传感器 可以报告 Disco 旋转中心当前的 X 和 Y 位置(以毫米或英寸为单位)。
GPS 传感器还可以报告当前航向(以度为单位)。
GPS 传感器位于 Disco 背面附近,用于通过读取沿场地内周边的 GPS 场地代码条来确定机器人在场地上的位置和方向。
您可以使用 GPS 传感器,利用您对笛卡尔坐标系的了解,驾驶到特定位置,从而帮助 Disco 导航场地。
使用 GPS 传感器,Disco 可以沿着 X 或 Y 轴行驶,直到传感器的值大于或小于阈值。 这使得 Disco 可以使用传感器反馈而不是设定距离来驾驶。
有关使用 GPS 传感器识别 VRC Virtual Skills 中的位置详细信息的更多信息, 请参阅这篇 VEX 库文章。