
Mặc dù Phòng thí nghiệm STEM VEX IQ (thế hệ thứ 2) được thiết kế cho Bộ công cụ IQ (thế hệ thứ 2), nhưng có nhiều cách để dạy Phòng thí nghiệm STEM (thế hệ thứ 2) bằng Bộ công cụ (thế hệ thứ nhất) của bạn. Trong bài viết này, chúng tôi cung cấp cho bạn các tài nguyên để giúp điều chỉnh Phòng thí nghiệm STEM (thế hệ thứ 2), cho phép bạn linh hoạt giảng dạy tất cả các Phòng thí nghiệm IQ STEM, với Bộ công cụ IQ (thế hệ thứ nhất) của bạn.
Cân nhắc chung khi dạy Đơn vị phòng thí nghiệm STEM (thế hệ thứ 2) với Bộ dụng cụ (thế hệ thứ nhất)
Mỗi Đơn vị phòng thí nghiệm STEM IQ (thế hệ 2) được cấu trúc xung quanh một cuộc thi đỉnh cao trong lớp học STEM. Các Bài học của Bài học tuân theo định dạng Học - Thực hành - Thi đấu có thể dự đoán trước, với Bài học Kết luận kết nối việc học của học sinh với sự nghiệp STEM ngoài đời thực. Các phần chính cần được điều chỉnh là các bản dựng và mẫu được đề xuất trong Bài học giới thiệu và một số điều chỉnh nhỏ của tài nguyên Tìm hiểu và Thực hành để phù hợp với việc sử dụng các bản dựng (thế hệ thứ nhất).
- Xem bài viết này để biết thêm thông tin về định dạng Đơn vị Phòng thí nghiệm STEM IQ (thế hệ 2).
- Xem các bài viết trong phần này của Thư viện STEM để được hỗ trợ thiết lập và tạo điều kiện cho Cuộc thi Phòng thí nghiệm STEM.
Trong Bài 1 của mỗi Đơn vị Phòng thí nghiệm STEM (thế hệ 2), học sinh được yêu cầu kiểm tra và sạc Pin để chuẩn bị cho các hoạt động của Đơn vị. Quy trình này khác đối với Pin (thế hệ thứ nhất).
- Xem các bài viết trong phần này của Thư viện STEM để biết hướng dẫn về cách kiểm tra và sạc Pin (thế hệ thứ nhất).
Phần sau đây xác định từng Đơn vị phòng thí nghiệm STEM (thế hệ) thứ 2, bản dựng IQ (thế hệ thứ 2) được sử dụng cho Phòng thí nghiệm đó và bản dựng IQ (thế hệ thứ nhất) tương thích mà bạn có thể sử dụng để hoàn thành các hoạt động trong Phòng thí nghiệm. Cũng bao gồm các đề xuất để điều chỉnh phần 'Chơi' của mỗi Phòng thí nghiệm.
- Chọn tên bản dựng để mở hướng dẫn bản dựng trong một cửa sổ mới.
Kéo co
Khám phá xem lợi thế cơ học và trọng tâm ảnh hưởng như thế nào đến khả năng kéo đồ vật của rô bốt và thiết kế rô bốt tốt nhất để giành chiến thắng trong cuộc thi Kéo co. Xem Phòng thí nghiệm STEM Kéo co tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
BaseBot 
|
Chế độ lái tự động
|
Sử dụng mẫu Autopilot (Động cơ Drivetrain 2) thay vì mẫu Basebot (Động cơ Drivetrain 2) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
Sử dụng các vật dụng trong lớp nặng khoảng 1 và 2 kilôgam (xấp xỉ 2 và 4 lb) thay vì Thùng lưu trữ IQ như được khuyến nghị trong các hoạt động thử thách và thực hành Bài 2 và 3. |
Thẻ đóng băng nhóm
Kiểm tra kỹ năng lái xe của bạn khi bạn lái rô bốt của mình bằng Bộ điều khiển IQ, chọn bánh xe và thêm cảm biến để cạnh tranh trong cuộc thi Thẻ đóng băng theo nhóm. Xem Đơn vị Phòng thí nghiệm STEM của Team Freeze Tag tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
|
BaseBot
|
Chế độ lái tự động
|
Trong Bài 1, các bước sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất) hơi khác so với hướng dẫn trong phần Chuẩn bị. Xem phần này của Thư viện STEM để biết thông tin hữu ích về cách sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất). Sử dụng mẫu Autopilot (Động cơ Drivetrain 2) thay vì mẫu Basebot (Động cơ Drivetrain 2) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
Trong Bài 2, quy trình truy cập và chạy Chương trình Điều khiển Trình điều khiển trên Brain (thế hệ 1) hơi khác so với các bước được trình bày trong phần Tìm hiểu. Xem bài viết này để biết các bước chạy Chương trình điều khiển trình điều khiển bằng Brain (thế hệ thứ nhất) và giúp học sinh của bạn làm quen với quá trình này. Bài 4 yêu cầu học sinh thêm một Công tắc đệm IQ vào rô-bốt của họ, tuy nhiên Công tắc lái tự động đã có hai công tắc được gắn ở phía sau. Yêu cầu học sinh tháo một Công tắc đệm và căn giữa đệm còn lại, đồng thời thực hiện các hoạt động thực hành và thử thách theo hướng dẫn. |
người máy bóng đá
Khám phá cách tạo một bộ điều khiển trên rô bốt của bạn để chộp, chuyền và ghi nhiều bàn thắng nhất với tư cách là cầu thủ bóng đá rô bốt trong cuộc thi Bóng đá rô bốt. Xem Phòng thí nghiệm Robot Bóng đá STEM tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
Clawbot đơn giản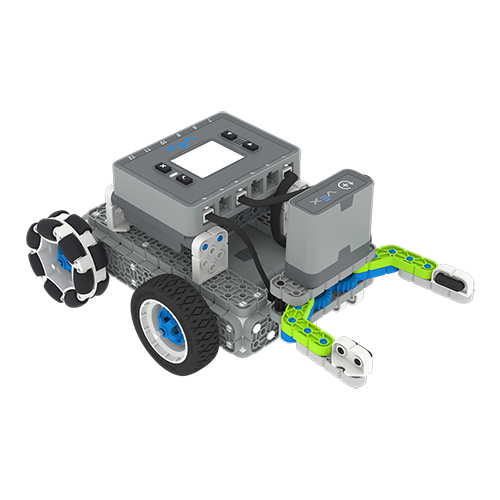
|
Clawbot IQ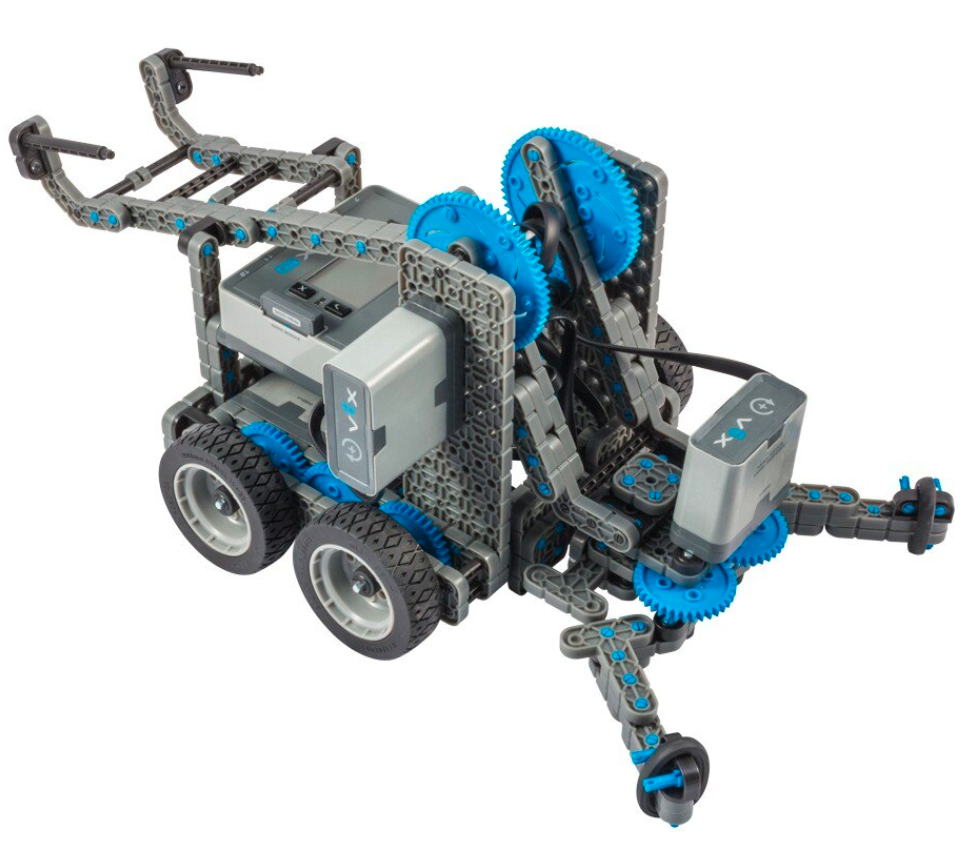
|
Trong Bài 1, các bước sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất) hơi khác so với hướng dẫn trong phần Chuẩn bị. Xem phần này của Thư viện STEM để biết thông tin hữu ích về cách sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất). Sử dụng mẫu Clawbot (Hệ truyền động 2 động cơ) (thế hệ 1) thay vì Clawbot Đơn giản (Hệ truyền động 2 động cơ) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
|
Săn tìm kho báu
Xây dựng và mã hóa Clawbot đơn giản bằng Cảm biến quang học để nhận biết và thu thập các khối màu đỏ để cạnh tranh trong cuộc thi Truy tìm kho báu. Xem Phòng thí nghiệm STEM Truy tìm kho báu tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
|
Clawbot đơn giản
|
Clawbot IQ
|
Sử dụng mẫu Clawbot (Hệ truyền động 2 động cơ) (thế hệ 1) thay vì Clawbot Đơn giản (Hệ truyền động 2 động cơ) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
Yêu cầu học sinh xem các hướng dẫn sau trong VEXcode IQ ngoài các Video Tìm hiểu trong Bài 2. Di chuyển móng vuốt Di chuyển cánh tay |
Lên và hơn
Khám phá cách thiết kế Clawbot để thu thập, nhặt và di chuyển các hình khối từ bên này sang bên kia của Trường, trong cuộc thi Lên và Vượt. Xem Đơn vị phòng thí nghiệm STEM cơ bản tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
Clawbot
|
Clawbot IQ
|
Trong Bài 1, các bước sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất) hơi khác so với hướng dẫn trong phần Chuẩn bị. Xem phần này của Thư viện STEM để biết thông tin hữu ích về cách sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất). Sử dụng mẫu Clawbot (Hệ truyền động 2 động cơ) (thế hệ 1) thay vì Clawbot (Hệ truyền động 2 động cơ) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
|
Bộ sưu tập khối lập phương
khám phá sự khác biệt giữa các thử thách điều khiển bằng người lái và tự lái, khi bạn học cách điều khiển Clawbot và viết mã cho nó để sắp xếp và xếp các khối vuông trong cuộc thi Người sưu tầm khối lập phương.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
| Clawbot |
Clawbot IQ
|
Trong Bài 1, các bước sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất) hơi khác so với hướng dẫn trong phần Chuẩn bị. Xem phần này của Thư viện STEM để biết thông tin hữu ích về cách sạc và ghép nối Bộ điều khiển (thế hệ thứ nhất). Sử dụng mẫu Clawbot (thế hệ 1) (Hệ dẫn động 2 động cơ) thay vì Clawbot (thế hệ 2) (Hệ truyền động 2 động cơ) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
Trong Bài 2, quy trình truy cập và chạy Chương trình Điều khiển Trình điều khiển trên Brain (thế hệ 1) hơi khác so với các bước được trình bày trong phần Tìm hiểu. Xem bài viết này để biết các bước chạy Chương trình điều khiển trình điều khiển bằng Brain (thế hệ thứ nhất) và giúp học sinh của bạn làm quen với quá trình này. |
Lâu đài Crasher
Tìm hiểu cách lập mã các vòng lặp để tạo rãnh rô-bốt của bạn. Xem Phòng thí nghiệm STEM Castle Crasher tại đây.
| (thế hệ thứ 2) Xây dựng | Bản dựng được đề xuất (thế hệ thứ nhất) | chuyển thể |
|---|---|---|
BaseBot có cảm biến
|
Chế độ lái tự động
|
Sử dụng mẫu Autopilot (Động cơ Drivetrain 2) thay vì mẫu Basebot có cảm biến (Động cơ Drivetrain 2) như được đề xuất trong Bài học 1: Sẵn sàng viết mã.
Cảm biến khoảng cách IQ (thế hệ 2) được giới thiệu trong phần Tìm hiểu Bài 2. Bạn có thể sử dụng thông tin từ bài viết Cảm biến khoảng cách (thế hệ 1) này để bổ sung thông tin cho học viên của mình. |