
Rô-bốt được sử dụng trong VRC Virtual Skills là phiên bản ảo của Disco, VEX V5 Hero Bot, được sử dụng cho 2022 -2023 Cuộc thi Người máy VEX (VRC) Quay lên. Virtual Disco có cùng kích thước và động cơ như Disco vật lý, nhưng có thêm các cảm biến để lập trình tự động trong VRC Virtual Skills. Trong Kỹ năng ảo VRC, chỉ có một robot và nó đã được cấu hình sẵn. Điều này giúp loại bỏ nhu cầu về cấu hình robot hoặc dự án mẫu được xác định trước.
Điều khiển rô-bốt
Disco có các điều khiển sau:
Hệ thống truyền động . Điều này cho phép danh mục khối “Hệ thống truyền động” trong Hộp công cụ của VEXcode V5 có thể lái và quay rô-bốt.
Cửa hút được điều khiển bởi Intake Motor Group. Điều này cho phép robot thu thập và ghi đĩa.
Đầu vào có thể được quay bằng cách sử dụng nhóm động cơ đầu vào và khối [Spin for]. Quay nhóm động cơ theo hướng 'xuất' sẽ di chuyển các đĩa về phía các ô Trường, trong khi quay theo hướng 'thu vào' cho phép bạn phóng các đĩa lên không trung để ghi điểm trong Mục tiêu cao.
Ở trên cùng của cửa hút là một bộ hai bánh xe. Chúng có thể được sử dụng để quay các con lăn.
Bằng cách quay nhóm động cơ nạp trong khi các bánh xe tiếp xúc với con lăn, con lăn sẽ quay và đổi màu.
cảm biến rô-bốt
Virtual Disco đã thêm các cảm biến để lập trình tự động trong VRC Virtual Skills.
cảm biến quán tính
Cảm biến quán tính được sử dụng với hệ thống truyền động để cho phép Disco rẽ chính xác và chính xác bằng cách sử dụng tiêu đề hệ thống truyền động.
Tiêu đề hệ thống truyền lực báo cáo giá trị từ 0 đến 359,9 độ và theo chiều kim đồng hồ là dương.
Để biết thêm thông tin về Cảm biến quán tính, xem bài viết này từ Thư viện VEX.
cảm biến khoảng cách
Có một Cảm biến khoảng cách ở mặt trước của Virtual Disco.
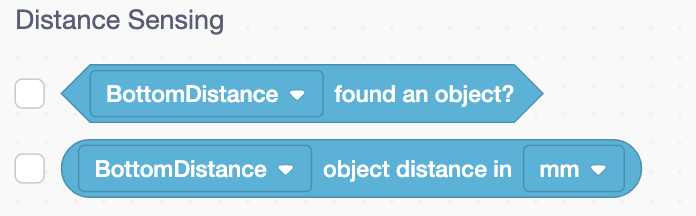
Cảm biến Khoảng cách báo cáo nếu một đối tượng ở gần cảm biến, cũng như khoảng cách gần đúng từ phía trước của cảm biến đến một đối tượng, tính bằng milimét hoặc inch.
Cảm biến Khoảng cách ở mặt trước của Disco có thể được sử dụng để xác định xem đĩa có ở phía trước cửa hút hay không hoặc khoảng cách của đĩa trên Trường tính từ cảm biến.
Để biết thêm thông tin về Cảm biến khoảng cách V5, Xem bài viết này của Thư viện VEX.
Trình theo dõi dòng
Ba Trình theo dõi dòng được đặt dọc theo mặt dưới của đầu vào của Disco. Chúng có thể được sử dụng để phát hiện vị trí của các đĩa trong đầu vào và xác định có bao nhiêu đĩa hiện đang được giữ trong đầu vào.
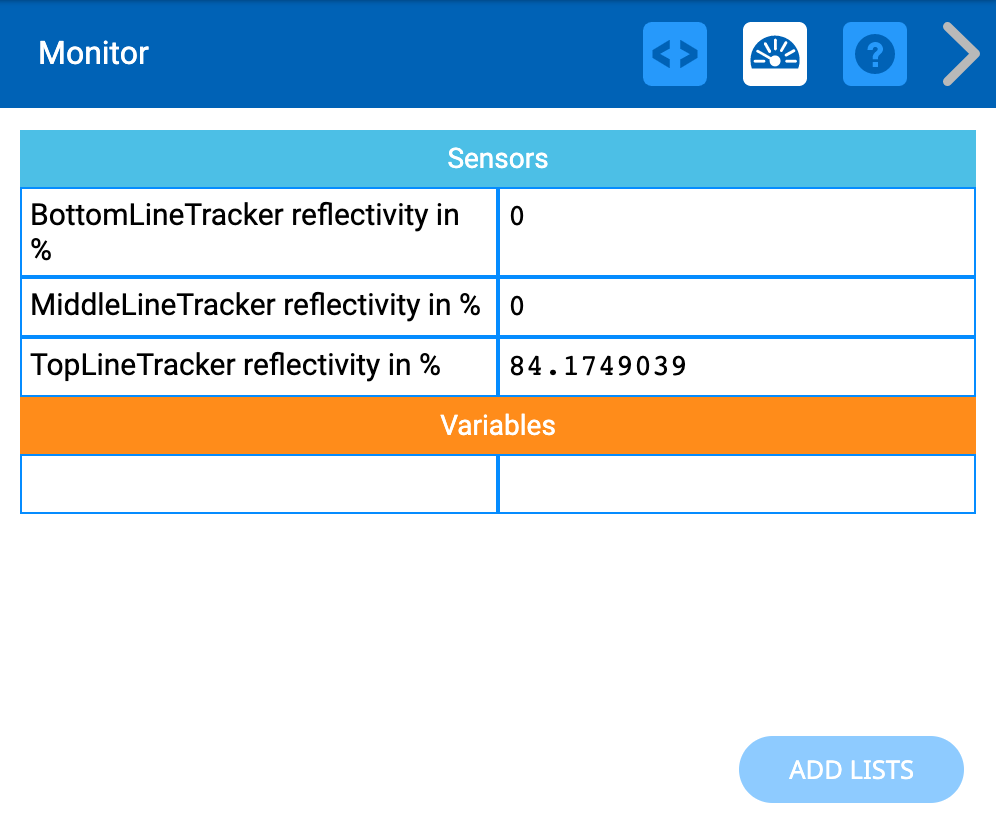
Bộ theo dõi dòng là một cảm biến 3 dây bao gồm đèn LED hồng ngoại và cảm biến ánh sáng hồng ngoại. Họ đo hệ số phản xạ của bề mặt. Điều quan trọng khi mã hóa Trình theo dõi đường thẳng là phải hiểu các giá trị hệ số phản xạ khác nhau sẽ được báo cáo tùy thuộc vào môi trường. Trong ví dụ này, có một đĩa hiện đang được tải ở trên cùng của đầu vào, do đó Trình theo dõi dòng trên cùng đang báo cáo giá trị hệ số phản xạ cao hơn.
Để tìm hiểu thêm về VEX V5 Line Trackers, hãy xem bài viết này.
Để tìm hiểu thêm về cách giám sát các giá trị cảm biến trong dự án VRC Virtual Skills (hiển thị trong hình ảnh ở đây), hãy xem bài viết này.
cảm biến quang học
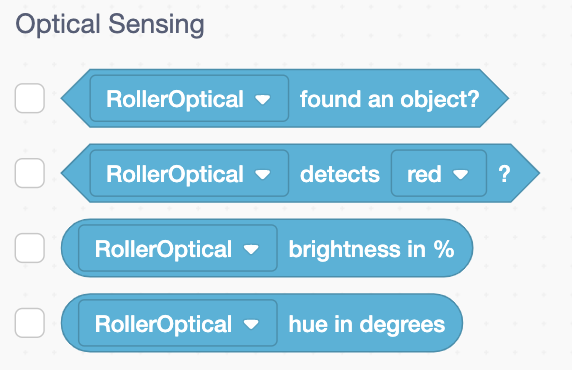
Cảm biến quang họcr báo cáo nếu một vật thể ở gần cảm biến và nếu có, vật thể đó có màu gì.
Cảm biến quang học cũng có thể báo cáo độ sáng và giá trị màu sắc của một đối tượng theo độ.
Cảm biến quang được đặt ở đầu Disco gần các bánh xe. Cảm biến này được đặt ở độ cao của các con lăn được sử dụng để xác định màu của từng con lăn
Để biết thêm thông tin về Cảm biến quang, hãy xem bài viết này của Thư viện VEX.
Cảm biến hệ thống định vị trò chơi (GPS)
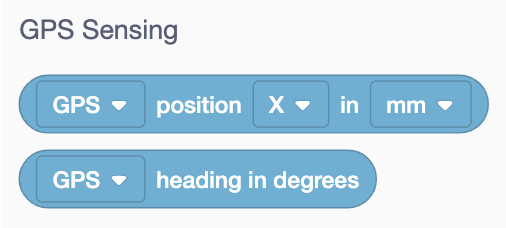
Cảm biến GPS có thể báo cáo vị trí X và Y hiện tại của tâm quay của Disco tính bằng milimét hoặc inch.
Cảm biến GPS cũng có thể báo cáo tiêu đề hiện tại theo độ.
Cảm biến GPS được đặt gần phía sau của Disco và được sử dụng để xác định vị trí và hướng của rô-bốt trên Trường bằng cách đọc Dải mã trường GPS dọc theo chu vi bên trong của Trường.
Bạn có thể sử dụng Cảm biến GPS để giúp Disco điều hướng Trường bằng cách lái xe đến các vị trí cụ thể bằng kiến thức của bạn về hệ tọa độ Descartes.
Sử dụng Cảm biến GPS, Disco có thể lái xe dọc theo trục X hoặc Y cho đến khi giá trị của cảm biến lớn hơn hoặc nhỏ hơn giá trị ngưỡng. Điều này cho phép Disco lái xe bằng cách sử dụng phản hồi của cảm biến thay vì khoảng cách đã đặt.
Để biết thêm thông tin về việc xác định chi tiết vị trí trong VRC Virtual Skills bằng Cảm biến GPS, hãy xem bài viết này của Thư viện VEX.