This article is not viewable in your language. Please check back at a future date.
Bản dịch của bài viết này được hoàn thành bằng máy dịch. Xin vui lòng tha thứ cho bất kỳ lỗi có thể xảy ra.
Bước 1: Tập hợp các bộ phận cần thiết và tháo Pin EDR

- Bạn sẽ cần các mục sau đây:
- (1) Pin Robot V5 (không hiển thị)
- (1) Cáp pin Robot V5 (không hiển thị)
- (2) Kẹp pin V5 (không hiển thị)
- (4) Vít #8-32 x 1/2"
- (4) #8-32 Hạt Keps
- (1) Cờ lê 11/32"
- (1) Khóa lục giác 3-32"
- Một VEX EDR Clawbot được chế tạo (không hiển thị)
- Khi muốn nối dây pin, bạn cũng sẽ cần gắn Bộ não Robot V5 vào robot của mình.
- Sử dụng cờ lê và phím lục giác để tháo Dây đeo pin VEX EDR và Pin robot 7.2V NiMH khỏi robot của bạn trước khi tiếp tục.
Bước 2: Gắn kẹp pin V5

- Gắn hai Kẹp pin V5 vào phần dưới cùng của cấu trúc thành bên trong cho cánh tay Clawbot.
Bước 3: Cố định Pin Robot V5 vào các kẹp
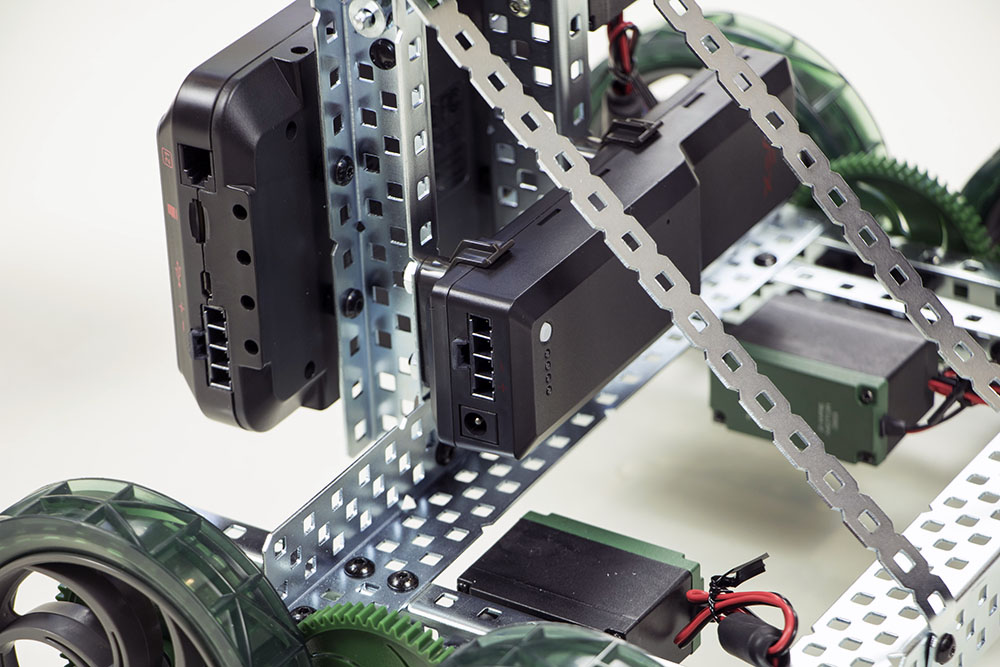
- Nhấn pin vào các kẹp cho đến khi bạn nghe và cảm thấy pin khớp vào vị trí.
Bước 4: Kết nối pin Robot V5
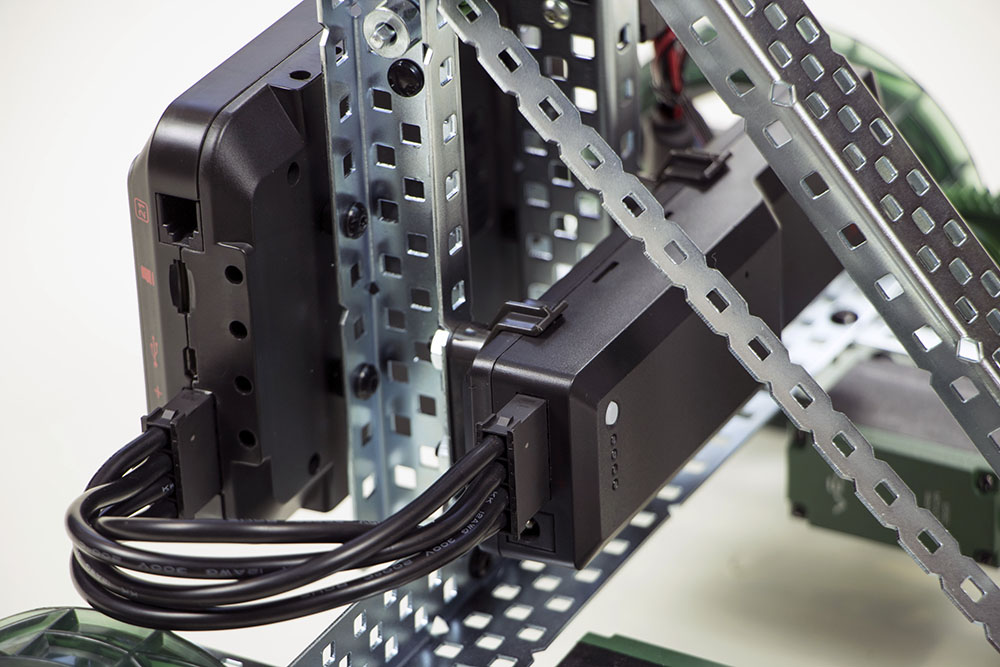
- Đấu dây pin vào Bộ não Robot V5 bằng cáp pin.
- Để biết hướng dẫn chi tiết hơn về cách lắp và đấu dây pin, hãy xemHướng dẫn lắp ráp V5 Clawbot.
