This article is not viewable in your language. Please check back at a future date.
Bản dịch của bài viết này được hoàn thành bằng máy dịch. Xin vui lòng tha thứ cho bất kỳ lỗi có thể xảy ra.
Cảm biến cung cấp khả năng cho robot nhận phản hồi từ môi trường. Có nhiều loại cảm biến VEX IQ (thế hệ 1) có thể được sử dụng để thu được các loại đầu vào khác nhau cho robot. Bảng bên dưới cung cấp thông tin tổng quan về chức năng của mỗi cảm biến và các ví dụ về cách sử dụng cảm biến đó trong một dự án.
Bảng so sánh cảm biến VEX IQ (thế hệ 1)
| Cảm biến |
Chức năng |
Ví dụ sử dụng |
|
Công tắc bội thu
|
- Cho robot biết thanh cản của nó được nhấn (giá trị cảm biến là 1) hay được thả ra (giá trị cảm biến là 0).
|
- Phát hiện xem robot có va vào vật thể hay không, chẳng hạn như tường mê cung hoặc đồ vật trong trò chơi
- Kích hoạt hành động của robot khi được nhấn hoặc thả ra.
- Chuyển đổi để bật hoặc tắt động cơ khi nhấn.
- Phát hiện các bộ phận khác của robot, chẳng hạn như cánh tay, khi nó ấn vào cản.
|
|
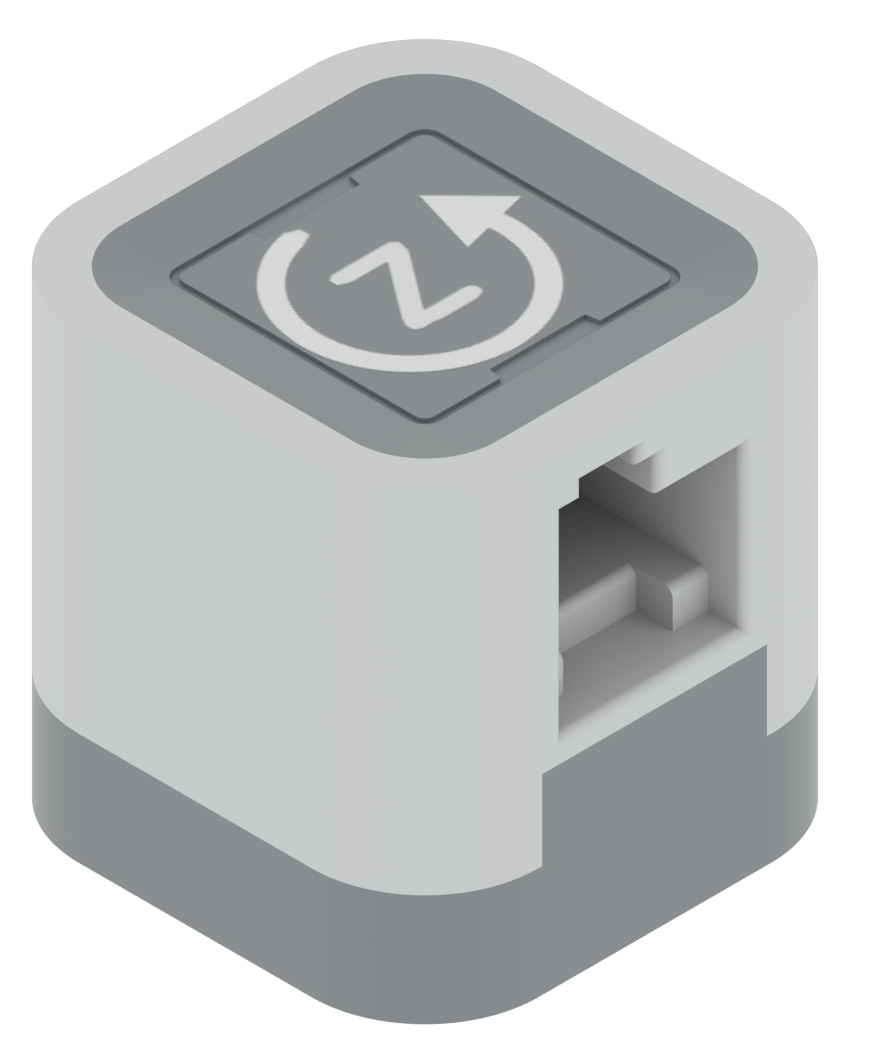
Đèn LED cảm ứng

|
- Có thể phát hiện cảm ứng điện dung, chẳng hạn như chạm ngón tay.
- Có thể được thiết lập để hiển thị nhiều màu sắc.
|
- Kích hoạt hành động của robot khi chạm vào
- Bắt đầu hoặc tạm dừng chương trình khi chạm vào
- Hiển thị các màu khác nhau trong các phần khác nhau của chương trình, do đó dễ dàng xác định mã để khắc phục sự cố hơn.
|
|
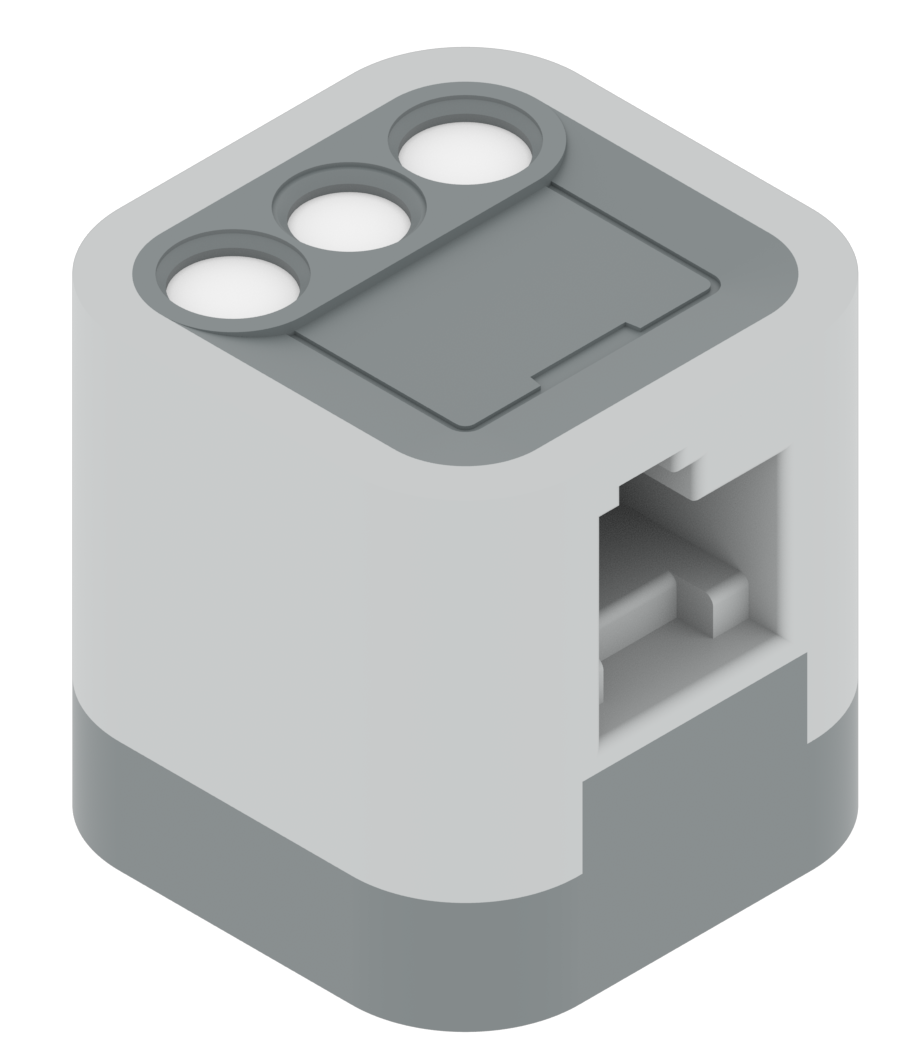
Cảm biến màu
|
-
Sử dụng ánh sáng phản xạ để phát hiện vật thể
- màu sắc
- giá trị màu sắc
- giá trị thang độ xám
- độ sáng
- sự gần gũi.
|
- Tương tác với một vật phẩm có màu nhất định, chẳng hạn như khi sắp xếp đồ vật theo màu sắc.
- Xác định giá trị màu sắc bằng số của một vật thể có màu. Dữ liệu này có thể hữu ích khi khắc phục sự cố cảm biến màu trong các điều kiện ánh sáng khác nhau.
- Hiểu cách Cảm biến phát hiện màu sắc trong các điều kiện ánh sáng khác nhau.
- Phát hiện một dòng
- Phát hiện xem một đối tượng có hiện diện hay không
|
|
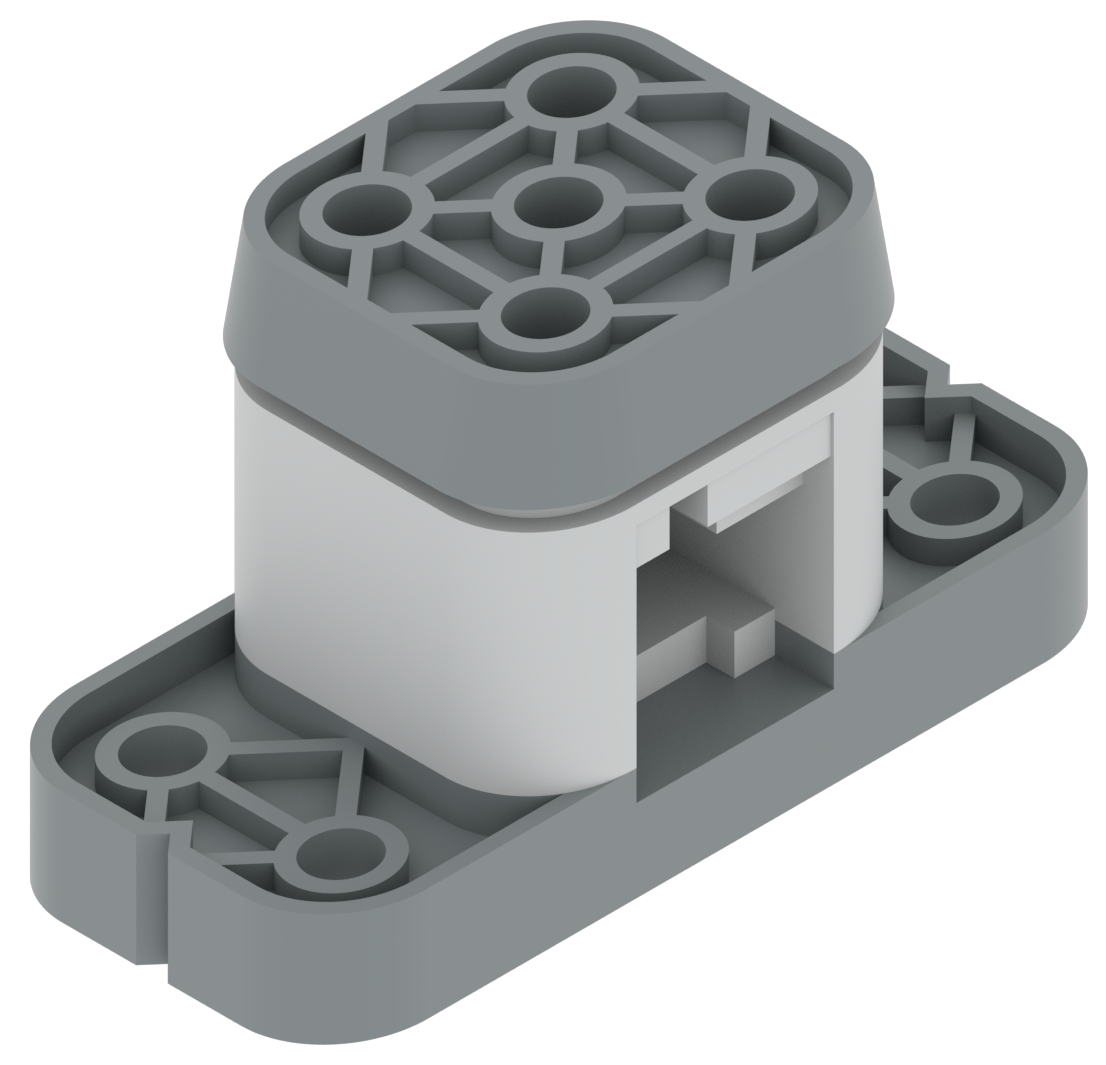
Cảm biến con quay hồi chuyển
|
- Phát hiện tốc độ và chuyển động quay của robot
|
- Duy trì lái xe thẳng
- Thực hiện các lượt rẽ chính xác
|
|
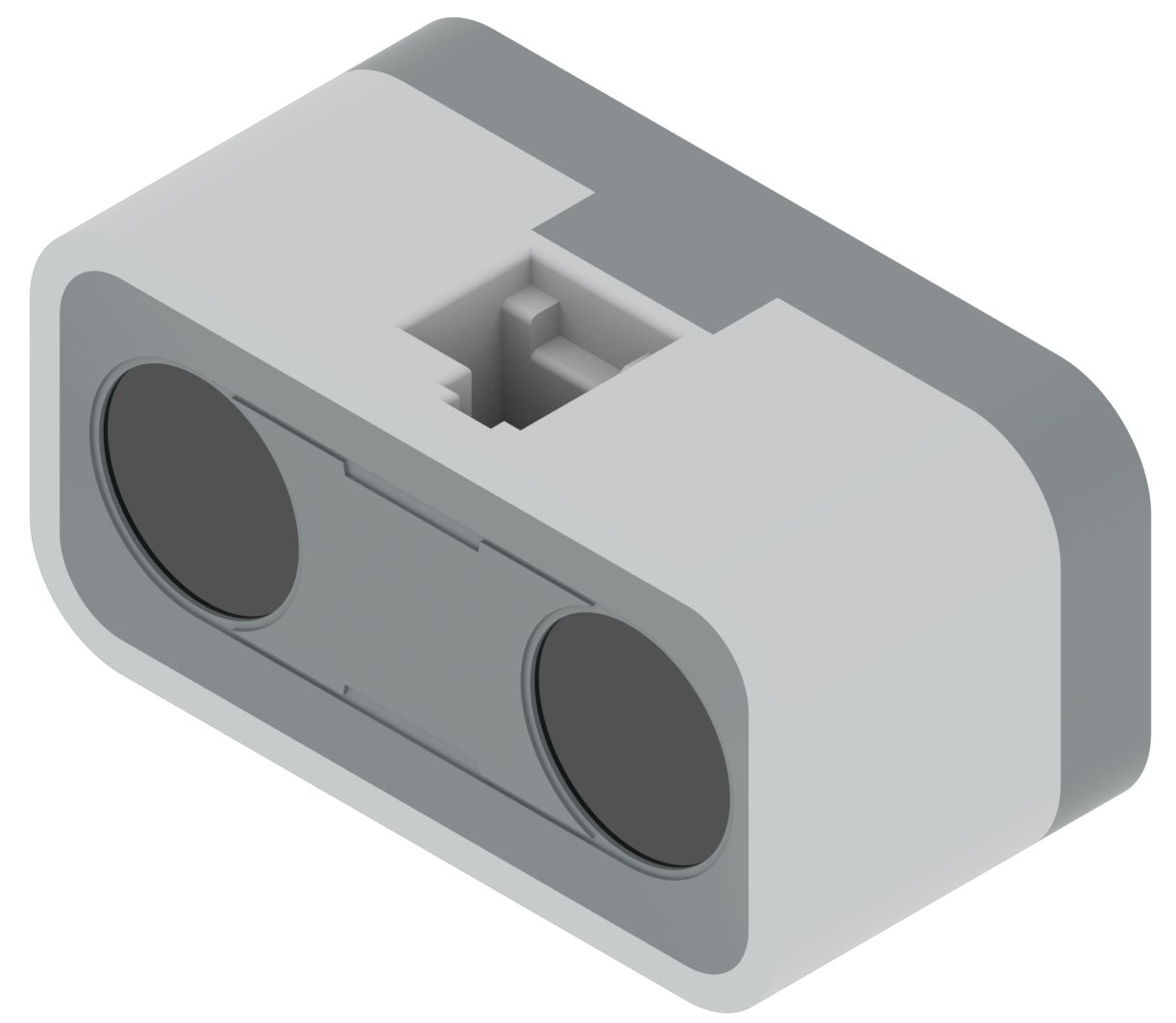
Cảm biến khoảng cách
|
- Phát hiện nếu có một vật thể ở phía trước nó
- Đo khoảng cách giữa nó và vật thể
|
- Lái xe đến một khoảng cách nhất định trước một vật thể, chẳng hạn như bức tường hoặc đồ vật trò chơi
- Lái xe về phía trước cho đến khi nhận thấy mình cách bức tường một khoảng nhất định thì dừng lại.
- Lái xe tới một đồ vật để nhặt nó lên.
- Lái xe ra khỏi một vật thể hoặc bề mặt cho đến khi đạt đến một khoảng cách cụ thể.
|
Thông tin cảm biến bổ sung
Để biết thông tin chi tiết về các cảm biến ở trên, hãy xem các bài viết sau:
