This article is not viewable in your language. Please check back at a future date.
การแปลบทความนี้เสร็จสมบูรณ์โดยการแปลด้วยเครื่อง โปรดยกโทษให้ข้อผิดพลาดใด ๆ ที่อาจเกิดขึ้น
ขั้นตอนที่ 1: รวบรวมชิ้นส่วนที่จำเป็นและถอดแบตเตอรี่ EDR ออก

- คุณจะต้องมีสิ่งต่อไปนี้:
- (1) แบตเตอรี่หุ่นยนต์ V5 (ไม่แสดง)
- (1) สายแบตเตอรี่หุ่นยนต์ V5 (ไม่แสดง)
- (2) คลิปแบตเตอรี่ V5 (ไม่แสดง)
- (4) สกรู #8-32 x 1/2"
- (4) #8-32 ถั่วเคปส์
- (1) ประแจ 11/32"
- (1) ประแจหกเหลี่ยม 3-32"
- VEX EDR Clawbot ที่สร้างขึ้น (ไม่แสดง)
- เมื่อคุณต้องการต่อสายแบตเตอรี่ คุณจะต้องติดตั้ง Robot Brain V5 เข้ากับหุ่นยนต์ของคุณด้วย
- ใช้ประแจและประแจหกเหลี่ยมเพื่อถอดสายรัดแบตเตอรี่ VEX EDR และแบตเตอรี่หุ่นยนต์ NiMH 7.2V ออกจากหุ่นยนต์ของคุณก่อนดำเนินการต่อ
ขั้นตอนที่ 2: ติดตั้งคลิปแบตเตอรี่ V5
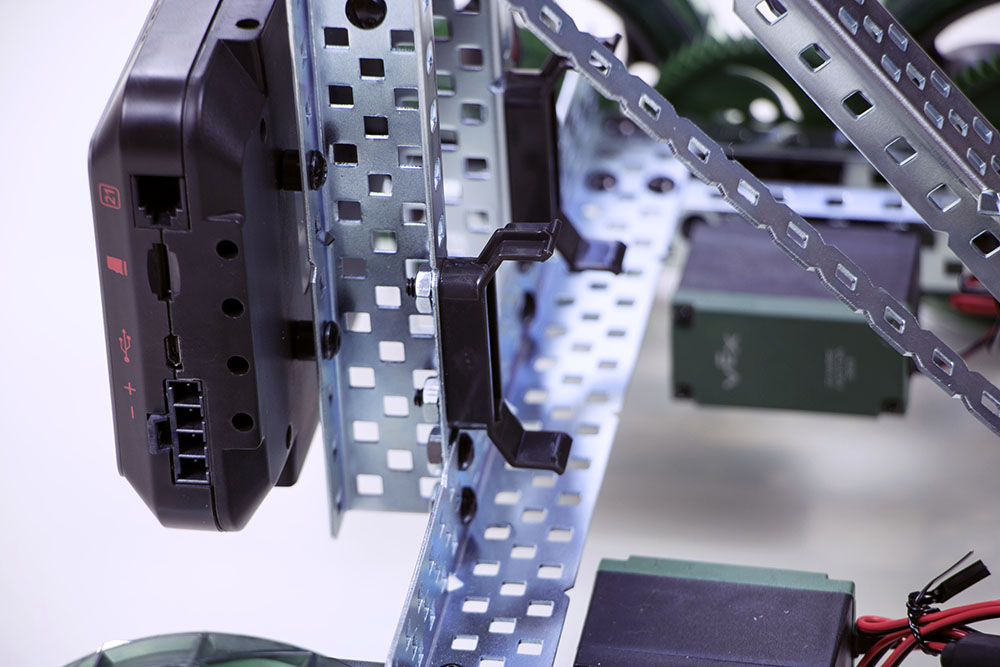
- ติดตั้งคลิปแบตเตอรี่ V5 สองตัวที่ด้านล่างของโครงสร้างผนังด้านในสำหรับแขน Clawbot
ขั้นตอนที่ 3: ยึดแบตเตอรี่หุ่นยนต์ V5 เข้ากับคลิป
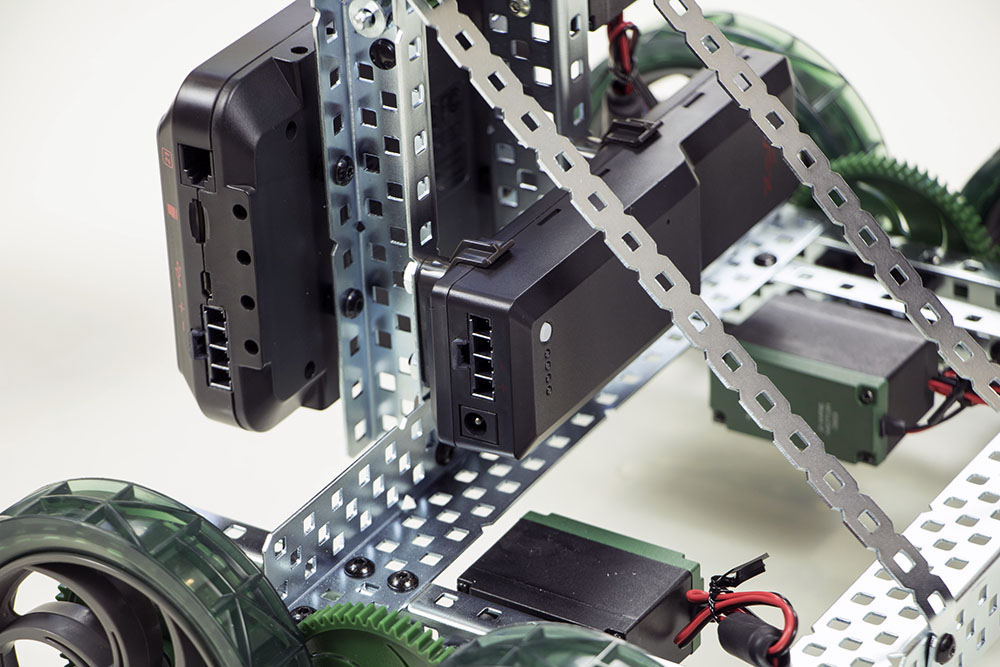
- กดแบตเตอรี่เข้าไปในคลิปจนกว่าคุณจะได้ยินและรู้สึกว่าแบตเตอรี่คลิกเข้าที่
ขั้นตอนที่ 4: เชื่อมต่อแบตเตอรี่หุ่นยนต์ V5
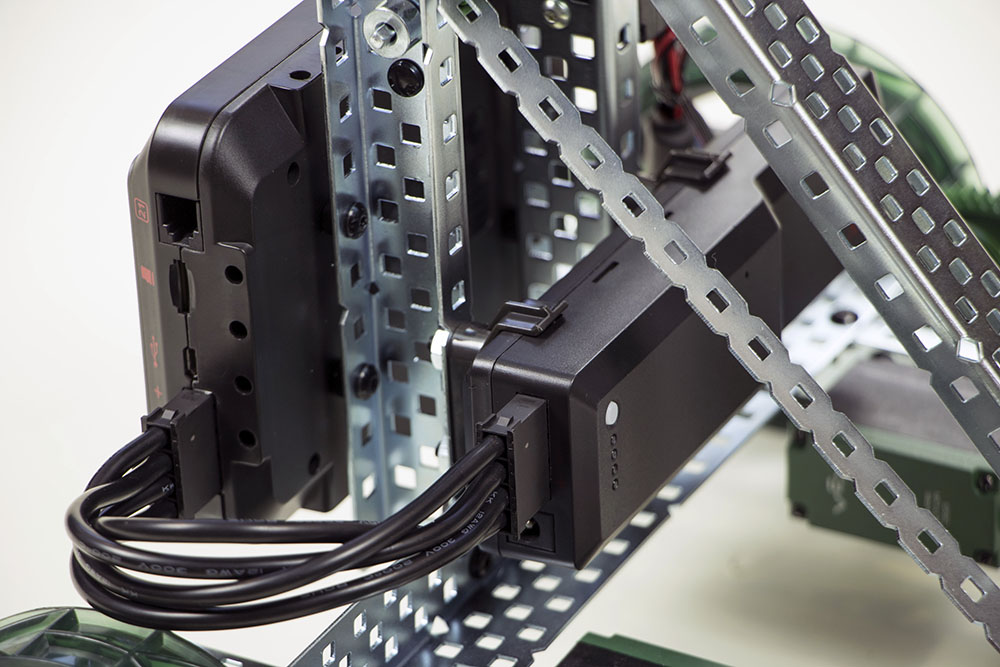
- ต่อแบตเตอรี่เข้ากับ V5 Robot Brain โดยใช้สายเคเบิลแบตเตอรี่
- สำหรับคำแนะนำโดยละเอียดเกี่ยวกับการติดตั้งและเดินสายแบตเตอรี่ โปรดดูคำแนะนำการสร้าง Clawbot V5
