This article is not viewable in your language. Please check back at a future date.
การแปลบทความนี้เสร็จสมบูรณ์โดยการแปลด้วยเครื่อง โปรดยกโทษให้ข้อผิดพลาดใด ๆ ที่อาจเกิดขึ้น
เซ็นเซอร์ช่วยให้หุ่นยนต์สามารถรับการตอบรับจากสิ่งแวดล้อมได้ มีเซ็นเซอร์ VEX IQ (รุ่นที่ 1) หลากหลายชนิดที่สามารถใช้เพื่อรับอินพุตประเภทต่างๆ สำหรับหุ่นยนต์ ตารางด้านล่างแสดงภาพรวมของสิ่งที่เซ็นเซอร์แต่ละตัวสามารถทำได้ และตัวอย่างวิธีการนำไปใช้ในโปรเจ็กต์
ตารางเปรียบเทียบเซ็นเซอร์ VEX IQ (รุ่นที่ 1)
| เซ็นเซอร์ |
การทำงาน |
ตัวอย่างการใช้งาน |
|
สวิตช์กันชน

|
- บอกหุ่นยนต์ว่ากันชนถูกกด (ค่าเซ็นเซอร์ 1) หรือปล่อย (ค่าเซ็นเซอร์ 0)
|
- การตรวจจับว่าหุ่นยนต์ชนเข้ากับวัตถุ เช่น กำแพงเขาวงกตหรือวัตถุในเกม
- กระตุ้นการทำงานของหุ่นยนต์ เมื่อกดหรือปล่อย
- สลับเพื่อเปิดหรือปิดมอเตอร์เมื่อกด
- การตรวจจับส่วนอื่นๆ ของหุ่นยนต์ เช่น แขน เมื่อกดเข้าไปในกันชน
|
|
สัมผัสแอลอีดี

|
- สามารถตรวจจับการสัมผัสแบบคาปาซิทีฟ เช่น การสัมผัสนิ้ว
- สามารถตั้งค่าให้แสดงสีได้หลายสี
|
- กระตุ้นการทำงานของหุ่นยนต์เมื่อสัมผัส
- การเริ่มหรือหยุดโปรแกรมชั่วคราวเมื่อสัมผัส
- การแสดงสีที่แตกต่างกันระหว่างส่วนต่างๆ ของโปรแกรม ดังนั้นจึงง่ายต่อการระบุโค้ดสำหรับการแก้ไขปัญหา
|
|
เซ็นเซอร์สี
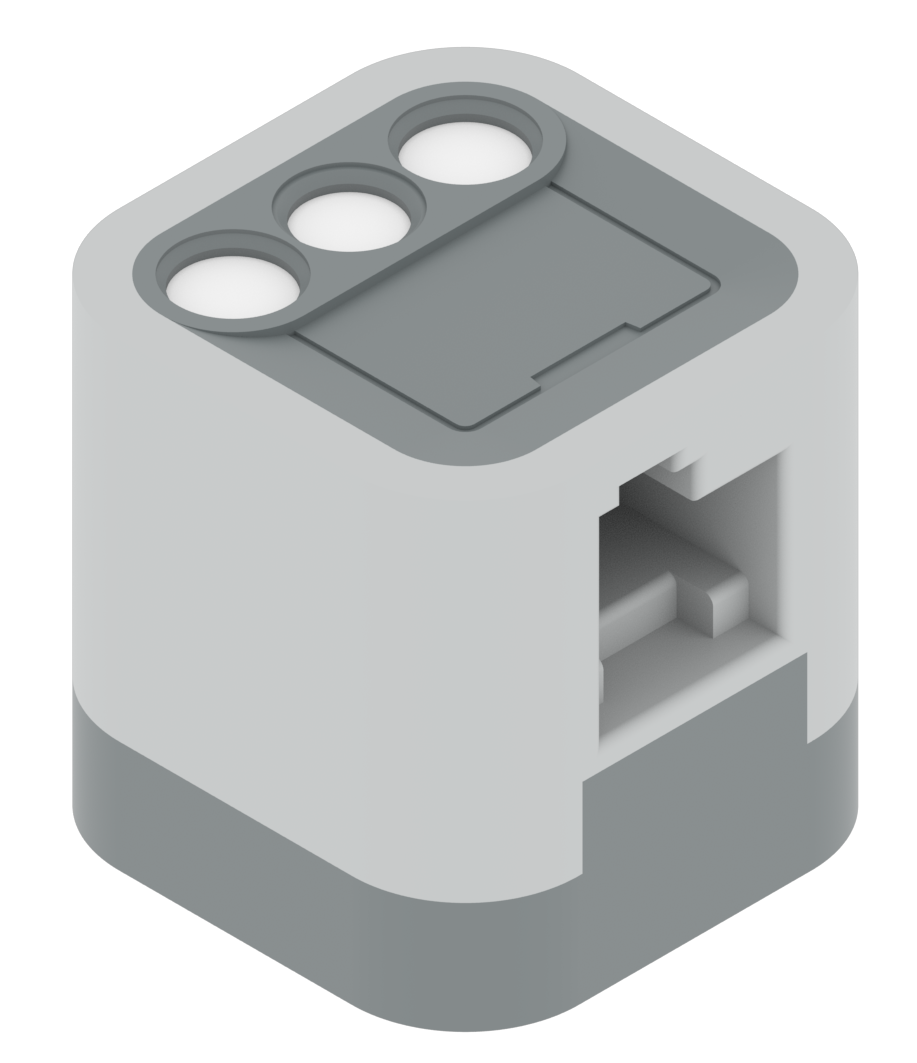
|
-
ใช้แสงสะท้อนเพื่อตรวจจับวัตถุ
- สี
- ค่าสี
- ค่าระดับสีเทา
- ความสว่าง
- ความใกล้ชิด
|
- การโต้ตอบกับรายการที่มีสีเฉพาะ เช่น เมื่อเรียงลำดับวัตถุตามสี
- การกำหนดค่าเฉดสีตัวเลขของวัตถุที่มีสี ข้อมูลนี้จะมีประโยชน์เมื่อแก้ไขปัญหาเซ็นเซอร์สีในสภาพแสงที่หลากหลาย
- ทำความเข้าใจวิธีที่เซ็นเซอร์ตรวจจับสีในสภาพแสงที่หลากหลาย
- การตรวจจับเส้น
- การตรวจจับว่ามีวัตถุอยู่หรือไม่
|
|
เซ็นเซอร์ไจโร
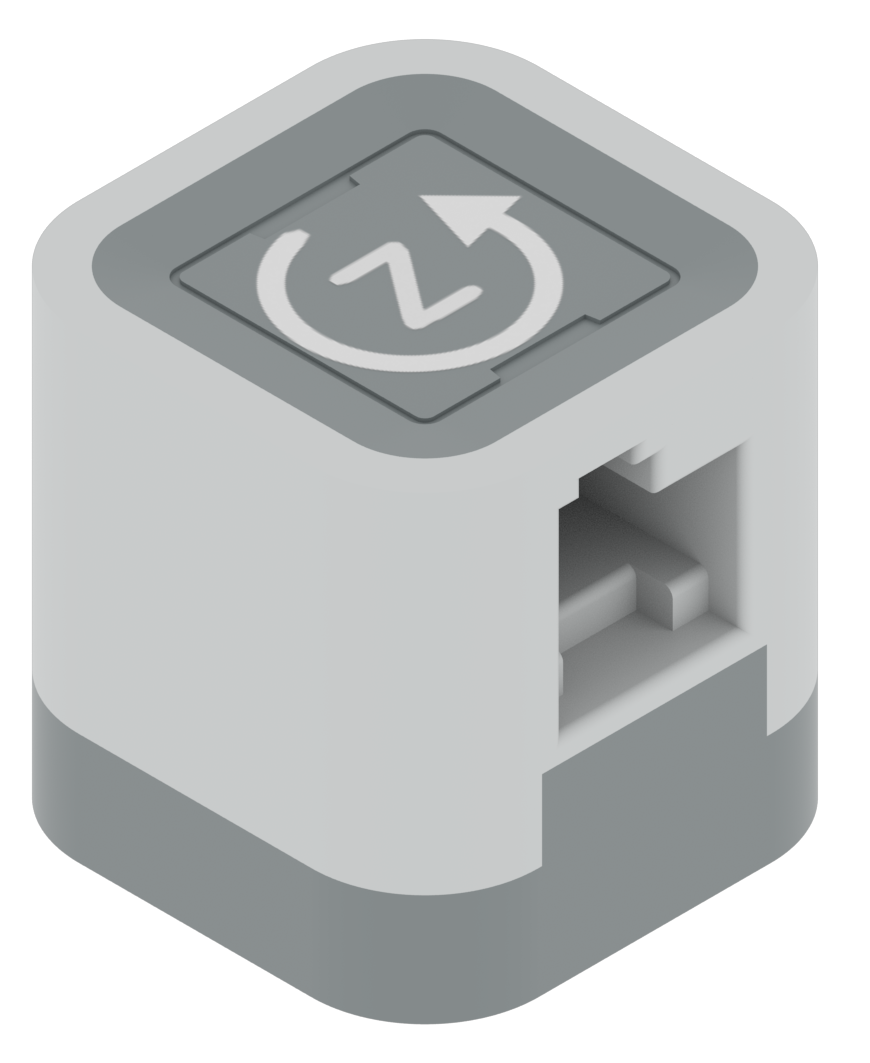
|
- ตรวจจับความเร็วและการหมุนของหุ่นยนต์
|
- รักษาการขับขี่ทางตรง
- การเลี้ยวที่แม่นยำ
|
|
เซ็นเซอร์วัดระยะ
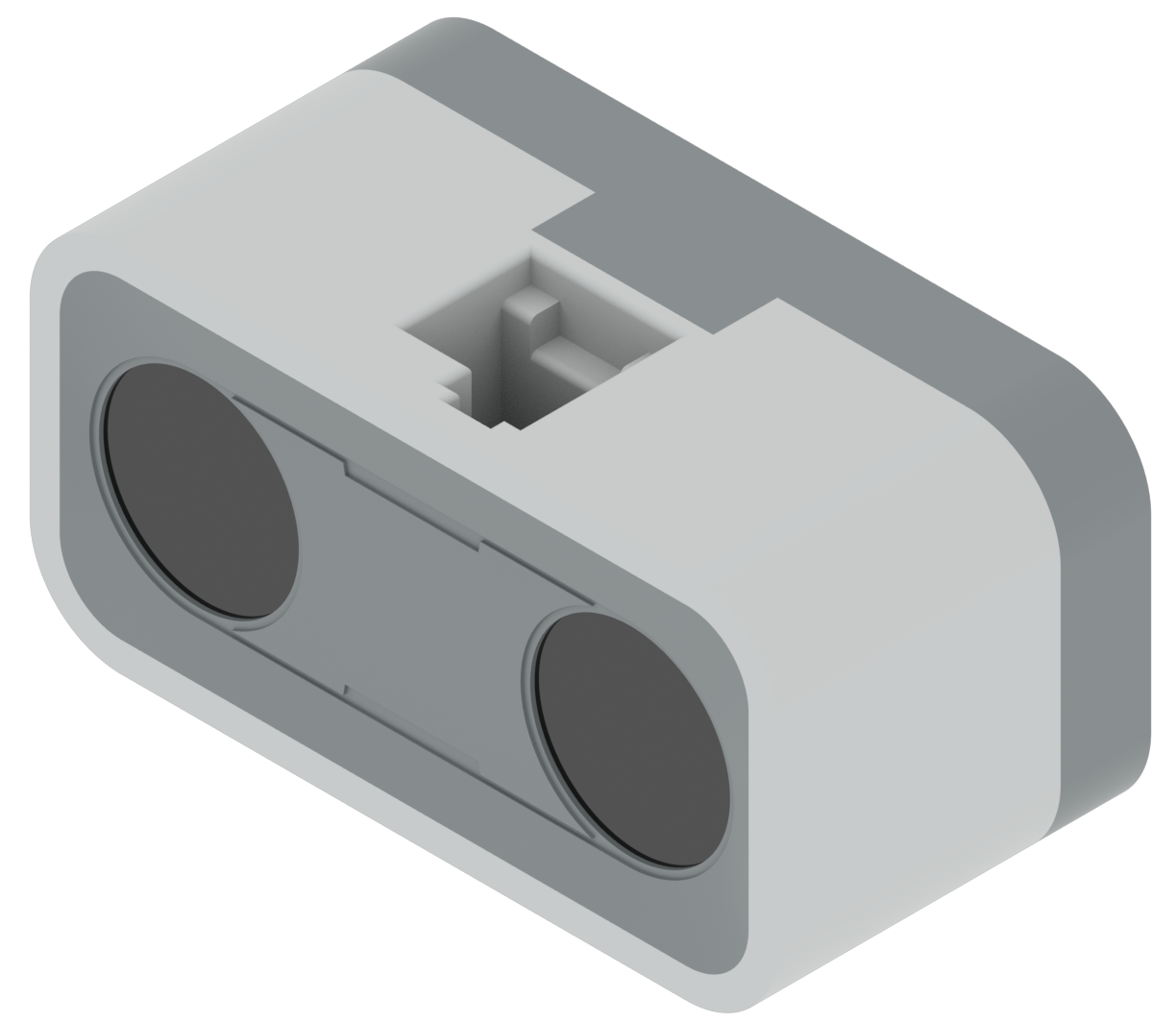
|
- ตรวจจับว่ามีวัตถุอยู่ด้านหน้าหรือไม่
- วัดระยะห่างระหว่างตัวมันเองกับวัตถุ
|
- การขับรถไปด้านหน้าวัตถุ เช่น กำแพงหรือเกม
- ขับไปข้างหน้าจนตรวจพบว่าอยู่ห่างจากกำแพงระยะหนึ่งจึงหยุด
- ขับรถไปที่วัตถุเพื่อหยิบมันขึ้นมา
- การขับรถออกห่างจากวัตถุหรือพื้นผิวจนกว่าจะถึงระยะทางที่กำหนด
|
ข้อมูลเซ็นเซอร์เพิ่มเติม
สำหรับข้อมูลโดยละเอียดเกี่ยวกับเซนเซอร์ด้านบน โปรดดูบทความต่อไปนี้:
