This article is not viewable in your language. Please check back at a future date.
Denna artikels översättning har gjorts med maskinöversättning. Vi ber om ursäkt för eventuella fel.
Sensorer ger en robot möjlighet att ta emot feedback från omgivningen. Det finns en mängd olika VEX IQ-sensorer (1:a generationen) som kan användas för att få olika typer av indata till roboten. Tabellen nedan ger en översikt över vad varje sensor kan göra och exempel på hur den kan användas i ett projekt.
Jämförelsetabell för VEX IQ (1:a generationen) sensorer
| Sensor |
Fungera |
Exempel på användningsområden |
|
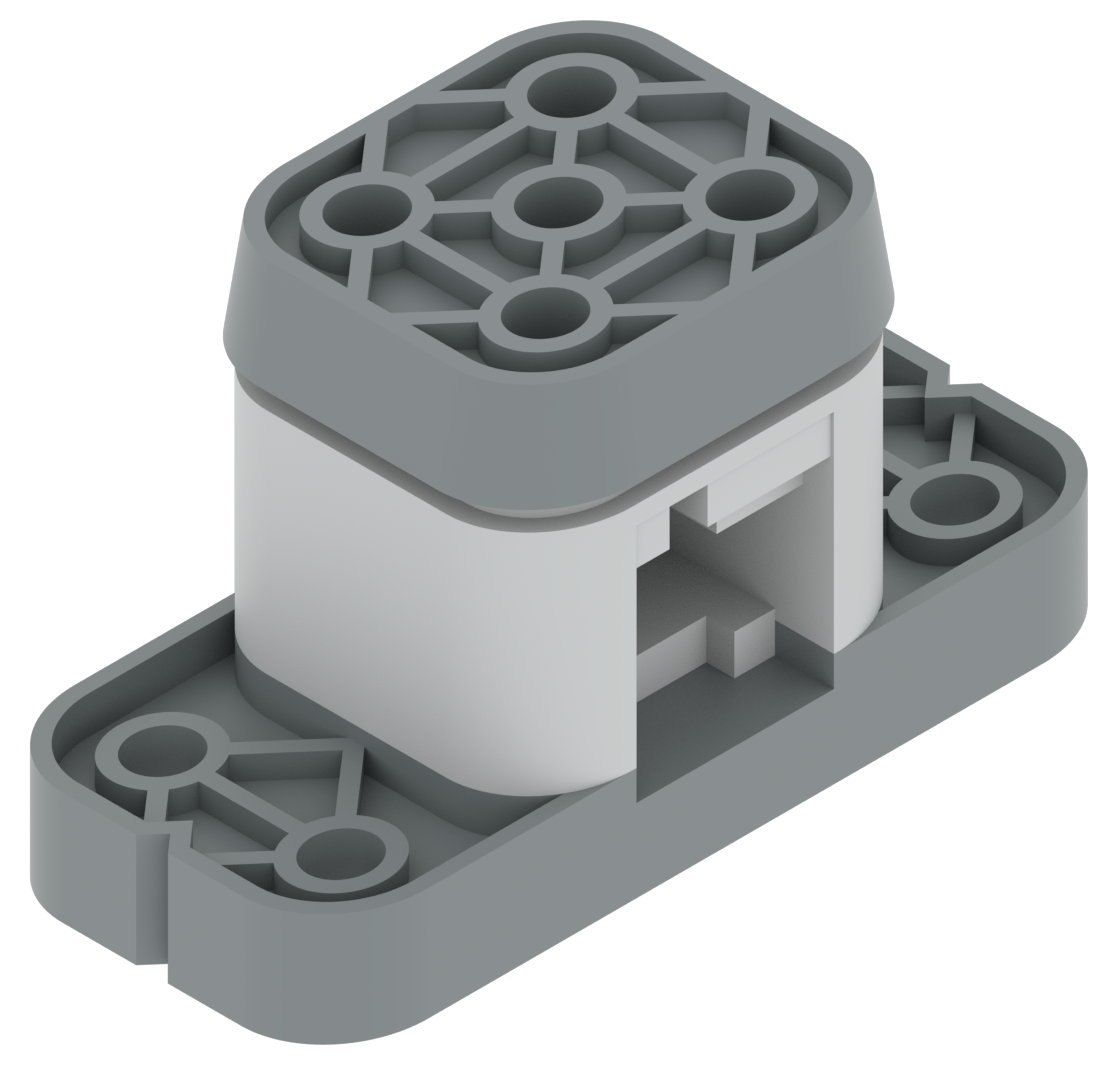
Stötfångarbrytare
|
- Anger för roboten om dess stötfångare är nedtryckt (sensorvärde 1) eller släppt (sensorvärde 0).
|
- Detekterar om roboten har stött på ett föremål, till exempel en labyrintvägg eller ett spelföremål
- Utlöser en robotåtgärd när den trycks ned eller släpps.
- Växla för att slå på eller av motorer när du trycker på.
- Detekterar andra delar av roboten, såsom en arm, när den trycker mot stötfångaren.
|
|
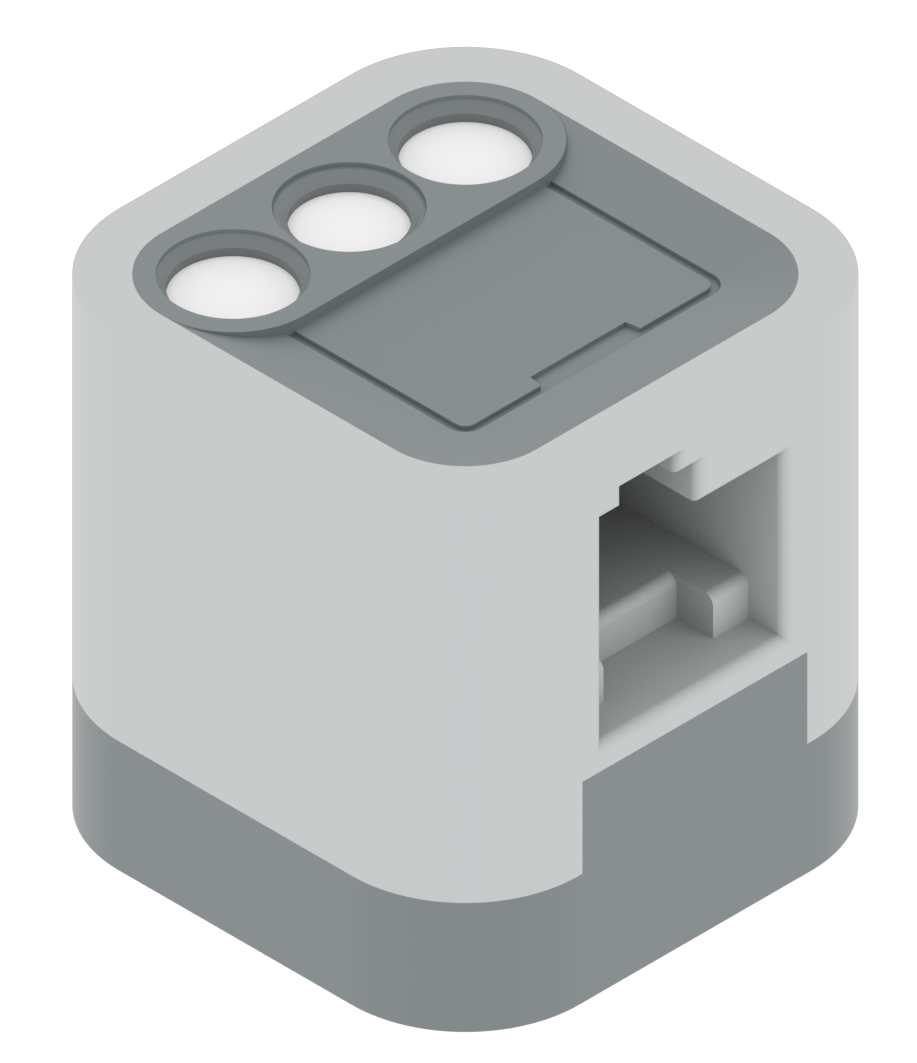
Pek-LED

|
- Kan upptäcka kapacitiv beröring, såsom beröring med ett finger.
- Kan ställas in för att visa många färger.
|
- Utlösa en robotåtgärd vid beröring
- Starta eller pausa ett program när du trycker på
- Visar olika färger under olika delar av ett program, så det är enklare att hitta rätt kod för felsökning.
|
|
Färgsensor
|
-
Använder reflekterat ljus för att upptäcka ett objekts
- färg
- nyansvärde
- gråskalevärde
- ljusstyrka
- anslutning.
|
- Interagera med ett föremål av en viss färg, till exempel när man sorterar föremål efter färg.
- Bestämning av det numeriska nyansvärdet för ett färgat objekt. Denna data kan vara användbar vid felsökning av färgsensorn under varierande ljusförhållanden.
- Förstå hur sensorn detekterar färg under olika ljusförhållanden.
- Att upptäcka en linje
- Avgöra om ett objekt finns
|
|
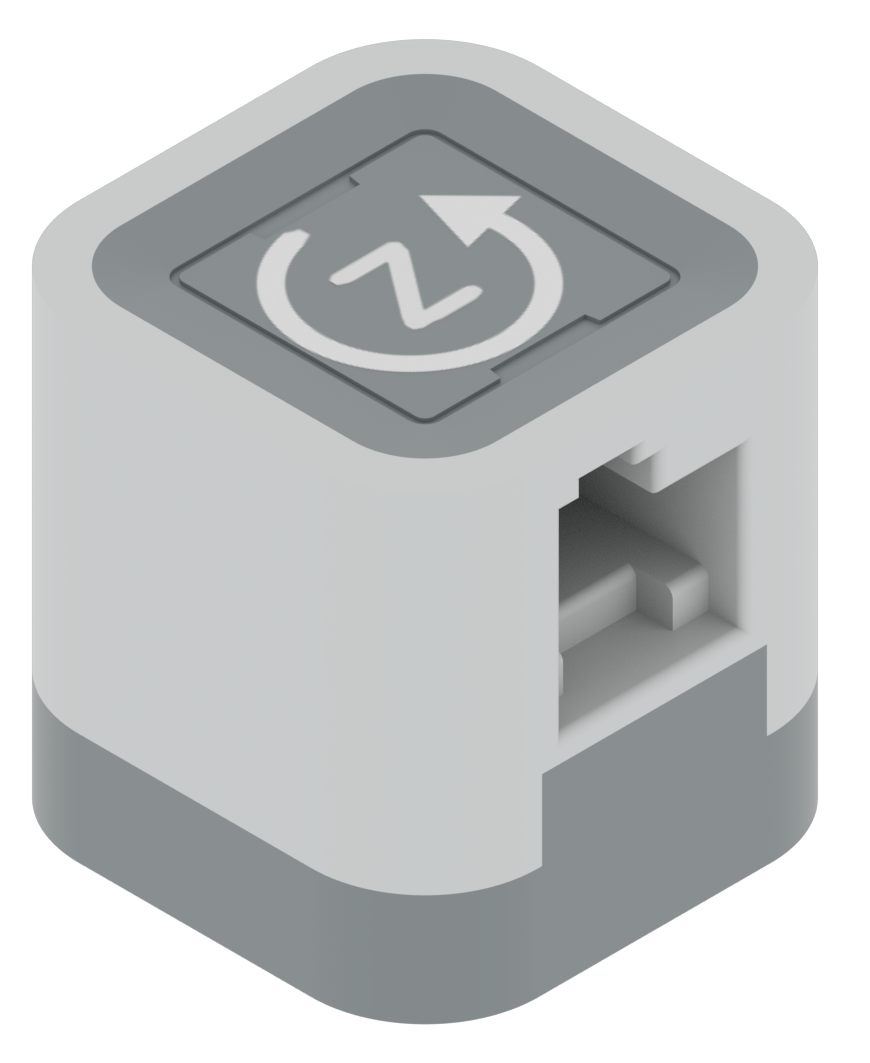
Gyrosensor
|
- Detekterar robotens hastighet och rotation
|
- Att hålla körningen rakt fram
- Göra exakta svängar
|
|
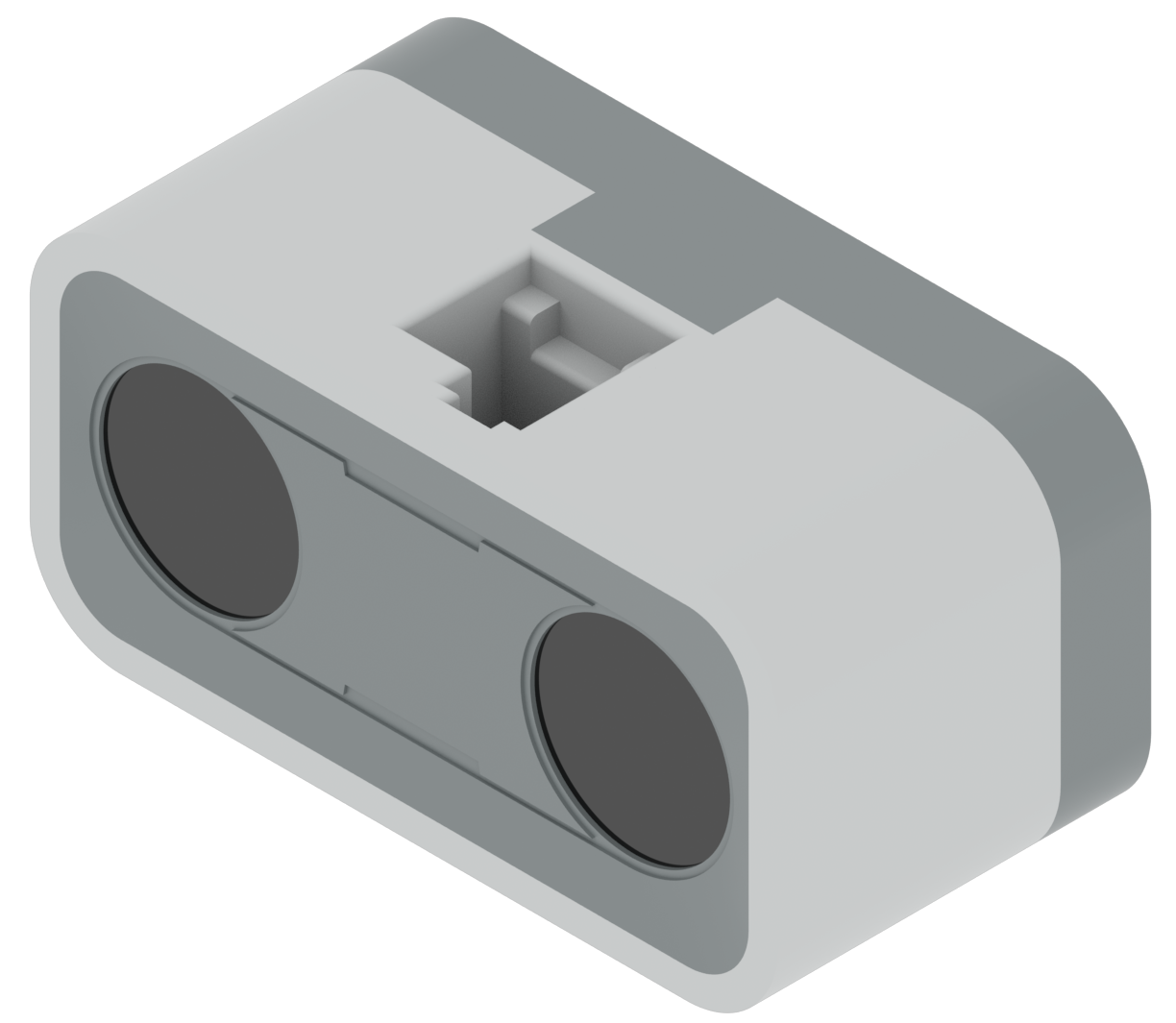
Avståndssensor
|
- Känner av om det finns ett föremål framför den
- Mäter avståndet mellan sig själv och ett objekt
|
- Körning till ett visst avstånd framför ett föremål, såsom en vägg eller ett spelföremål
- Kör framåt tills den känner av att den är ett visst avstånd från en vägg, och stannar sedan.
- Köra till ett föremål för att hämta det.
- Att köra bort från ett föremål eller en yta tills det har nått ett visst avstånd.
|
Ytterligare sensorinformation
För detaljerad information om sensorerna ovan, se följande artiklar:
