This article is not viewable in your language. Please check back at a future date.
Перевод этой статьи был выполнен машинным переводом. Пожалуйста, простите любые возможные ошибки.
Хотя лабораторные блоки EXP STEM были разработаны для комплекта VEX EXP Kit и соответствуют формату «Обучай-практикуйся-соревнуйся», существует множество способов преподавания этих лабораторных занятий STEM с помощью комплекта V5. В этой статье мы предоставляем вам ресурсы, которые помогут адаптировать EXP STEM Labs, предоставляя вам возможность преподавать как V5, так и EXP STEM Lab Units.
Чтобы узнатькак объединить лабораторные занятия EXP и STEM-программы V5 в вашем классе, с этим общим руководством по темпам работы V5.
Общие соображения при преподавании лабораторных работ EXP STEM с использованием комплектов V5
Роботы V5 занимают больше места, чем сборки EXP. При создании полей для тренировок и испытаний вам может потребоваться увеличить размер поля, чтобы у Clawbot или Speedbot было достаточно места для навигации. Ниже будут даны рекомендации по полям большего размера для каждого блока. Их можно создать либо с помощью полевых плиток VEX V5, либо с помощью ленты на полу того же размера.
Вводный урок
Урок 1 в каждом лабораторном модуле STEM включает введение в соревнование в конце модуля, а также проверку уровня заряда батареи и контроллера и подготовку к использованию VEXcode EXP. Используйте статьи ниже, чтобы узнать, как проверить уровень заряда батареи V5 и подготовиться к использованию VEXcode V5.
В следующем разделе описаны лаборатория EXP STEM, сборка EXP, которая используется для этого модуля, и совместимая сборка V5, которую вы можете использовать для выполнения практических и сложных заданий. Также включены предложения по адаптации соревнований внутри каждого подразделения.
Тег командного замораживания
В этом блоке вы будете управлять BaseBot с помощью контроллера, выбирать колеса и добавлять датчики для участия в соревновании Team Freeze Tag! Смотрите блок Team Freeze Tag здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
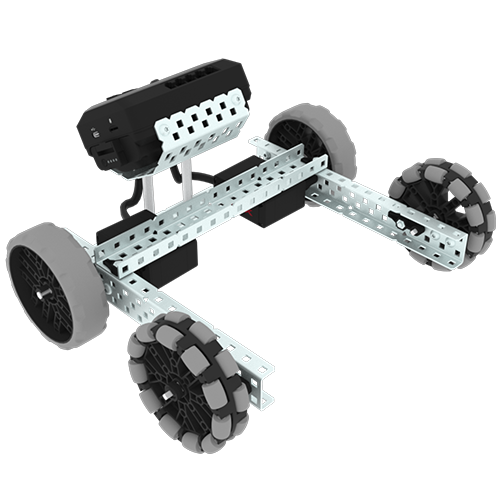
БазовыйБот
|
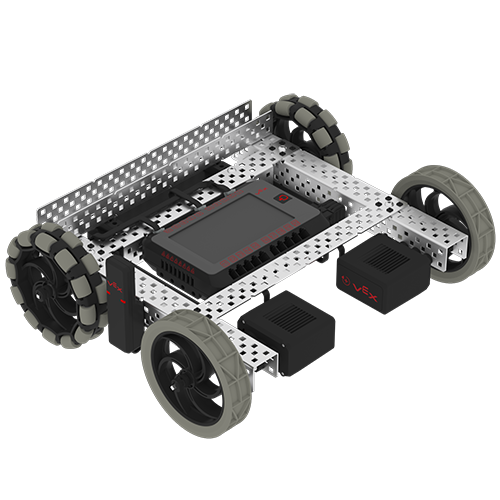
Спидбот
|
- Для всех видов деятельности рекомендуется использовать поле размером 6 на 8 футов (~ 180 на 240 см), чтобы у роботов было больше места для навигации.
- Все занятия, в которых используются бакиболы, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре).
- Урок 3. В стартовые комплекты V5 входят колеса двух типов (всенаправленные и ходовые колеса 4 дюйма). Используйте их в практическом упражнении.
- Урок 4. Добавьте C-канал к передней части робота, чтобы облегчить разметку. Бамперный выключатель можно установить на задней части робота на С-образном канале над аккумулятором.
|
Робот-футбол
В этом модуле вы узнаете, как создать манипулятор для вашего робота, чтобы хватать, передавать и забивать больше всего голов в качестве робота-футболиста в соревновании по футболу роботов! См. модуль «Футбол роботов» здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
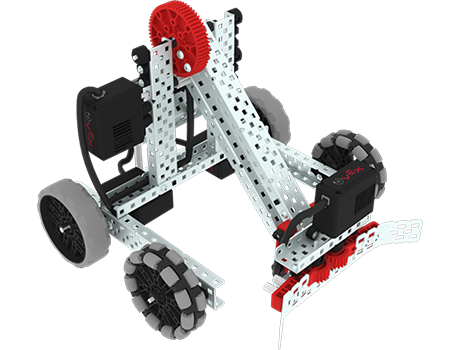
Коготьбот
|
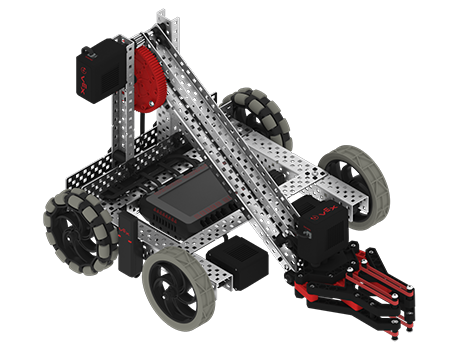
Коготьбот
|
- Все занятия, в которых используются шары Buckyballs, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре).
- Урок 3: Для тренировок и заданий рекомендуется использовать доску размером 4 на 6 футов (~ 120 на 180 см).
- Для соревнований по футболу роботов рекомендуется использовать поле размером 6 на 8 футов (~ 180 на 240 см), чтобы у роботов было больше места для навигации.
|
Вверх и снова
В этом модуле вы узнаете, как сконструировать робота-когтя, который будет собирать, подбирать и перемещать бакиболлы с одной стороны поля на другую в соревновании «Вверх и больше»! См. раздел «Вверх и вниз» здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
Коготьбот
|
Коготьбот
|
- Для всех тренировок и соревнований рекомендуется использовать поле размером 4 на 6 футов (~ 120 на 180 см).
- Все занятия, в которых используются бакиболы, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре). Их также можно заменить квадратными игровыми элементами, которые можно штабелировать, а не ставить бакибол на кольцо.
- Урок 4. Чтобы создать барьер, вы можете использовать дополнительный металл из набора или другие классные материалы, например картон. Барьер должен быть 4–5 дюймов (~ 10–12 см) в высоту и охватывать ширину поля.
- Для соревнований Up and Over рекомендуется использовать поле размером 6 на 8 футов (~ 180 на 240 см), чтобы у роботов было больше места для навигации.
|
Разрушитель замка
В этом разделе вы узнаете, как использовать оптические датчики и датчики расстояния для поиска, разрушения и очистки «замков» Бакибола, чтобы набирать очки в соревновании Castle Crasher! Смотрите раздел «Разрушители замков» здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
БазовыйБот
|
Спидбот
|
- Для всех тренировок и соревнований, а также соревнований Castle Crasher, рекомендуется использовать приподнятое поле размером 4 на 4 фута (~ 120 на 120 см).
- Возможно, вы захотите увеличить размер до 5 на 5 футов (~ 150 на 150 см), чтобы у роботов было больше места для перемещения по полю.
- Все занятия, в которых используются бакиболы, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре). Их также можно заменить квадратными игровыми элементами для складывания вместо создания стопок бакиболов.
- В уроках 3 и 4 представлены рекомендуемые положения установки датчиков расстояния и оптических датчиков. Добавьте C-канал к передней части Speedbot, чтобы использовать его в качестве места установки датчиков.
|
Охота за сокровищами
В этом модуле вы создадите и закодируете робота-когтя с оптическим датчиком, который будет распознавать и собирать красные бакиболлы для участия в соревновании «Охота за сокровищами»! Смотрите раздел «Охота за сокровищами» здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
Коготьбот
|
Коготьбот
|
- Для всех тренировок и соревнований, а также соревнований по поиску сокровищ рекомендуется использовать поле размером 3 на 5 футов (~ 90 на 150 см) с удаленной одной стеной в дальнем конце, чтобы создать отверстие для «домашней зоны». .'
- Возможно, вы захотите увеличить размер до 4 на 6 футов (~ 120 на 180 см), чтобы у роботов было больше места для перемещения по полю.
- Все занятия, в которых используются бакиболы, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре).
- У вас должно быть два объекта красного цвета и шесть объектов другого цвета.
|
Лидер кольца
В этом модуле вы изучите разницу между управлением водителем и автономным движением, поскольку вы используете несколько программ (автономное управление и управление водителем), чтобы забивать кольца на столбах разного размера в соревновании лидера ринга! Смотрите блок Ring Leader здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
Коготьбот
|
Коготьбот
|
- Для всех тренировок и соревнований, а также соревнований лидеров ринга рекомендуется использовать поле размером 3 на 5 футов (~ 90 на 150 см) с прикрепленными столбами различного размера.
- Посты создаются с использованием соединенных вместе C-каналов. Вы можете использовать следующие детали, чтобы воссоздать столбы с помощью комплекта V5 или создать столбы аналогичной высоты с использованием других объектов класса.
- Небольшой столб представляет собой С-образный канал размером 1x2x1x8, прикрепленный вертикально к полю (высота примерно 100 мм).
- Средняя стойка представляет собой C-образный канал 1x2x1x8 и C-канал 1x2x1x12, прикрепленный вертикально к полю (высота примерно 250 мм).
- Большой столб представляет собой два C-канала 1x2x1x8 и C-канал 1x2x1x12, прикрепленные вертикально к полю (высота примерно 350 мм).
- Все занятия, в которых используются кольца, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (диаметр 4 дюйма/10 см) с центральным отверстием для размещения на стойках.
|
Платформа Placer
В этом модуле вы изучите конструкцию манипуляторов, в том числе подъемников, которые помогут вашему роботу размещать кольца и бакиболлы на платформах различной высоты и набирать очки. В соревновании «Лидер ринга» команды объединятся, чтобы разработать игровую стратегию для команды из двух роботов, чтобы попытаться выиграть соревнование! Смотри блок размещения платформы здесь.
| Опыт сборки |
Рекомендуемая сборка V5 |
Адаптации |
Коготьбот
|
Коготьбот
|
- Для практических и сложных заданий для Уроков 2 и 3, а также практических занятий для Урока 4 рекомендуется использовать поле размером 4 на 4 фута со стенами (приблизительно 120 на 120 см) с прикрепленными платформами.
- Для выполнения задания к Уроку 4 рекомендуется использовать поле размером 4 на 6 футов со стенами (приблизительно 120 на 180 см) и прикрепленными платформами.
- Для соревнований по расстановке платформ рекомендуется использовать поле размером 6 на 6 футов со стенами (приблизительно 180 на 180 см) и прикрепленными платформами.
- Платформы создаются с использованием любых дополнительных металлических деталей из комплекта и полевых плиток. Вы можете использовать следующие детали, чтобы воссоздать платформы с помощью комплекта V5 или создать платформы аналогичной высоты, используя другие объекты классной комнаты.
- Среднюю платформу рекомендуется приподнять примерно на 20 см или 8 дюймов от поля.
- Высокую платформу рекомендуется приподнять примерно на 40,5 см или 16 дюймов над полем.
- Все занятия, в которых используются кольца, можно заменить другими круглыми игровыми элементами или классными предметами примерно того же размера (4 дюйма/10 см в диаметре) с центральным отверстием.
|
