This article is not viewable in your language. Please check back at a future date.
A tradução deste artigo foi realizada por tradução automática. Por favor, perdoe quaisquer possíveis erros.
Os sensores fornecem a capacidade de um robô receber feedback do ambiente. Há uma variedade de sensores VEX IQ (1ª geração) que podem ser usados para obter diferentes tipos de entrada para o robô. A tabela abaixo fornece uma visão geral do que cada sensor pode fazer e exemplos de como ele pode ser usado em um projeto.
Tabela de comparação de sensores VEX IQ (1ª geração)
| Sensor |
Função |
Exemplos de uso |
|
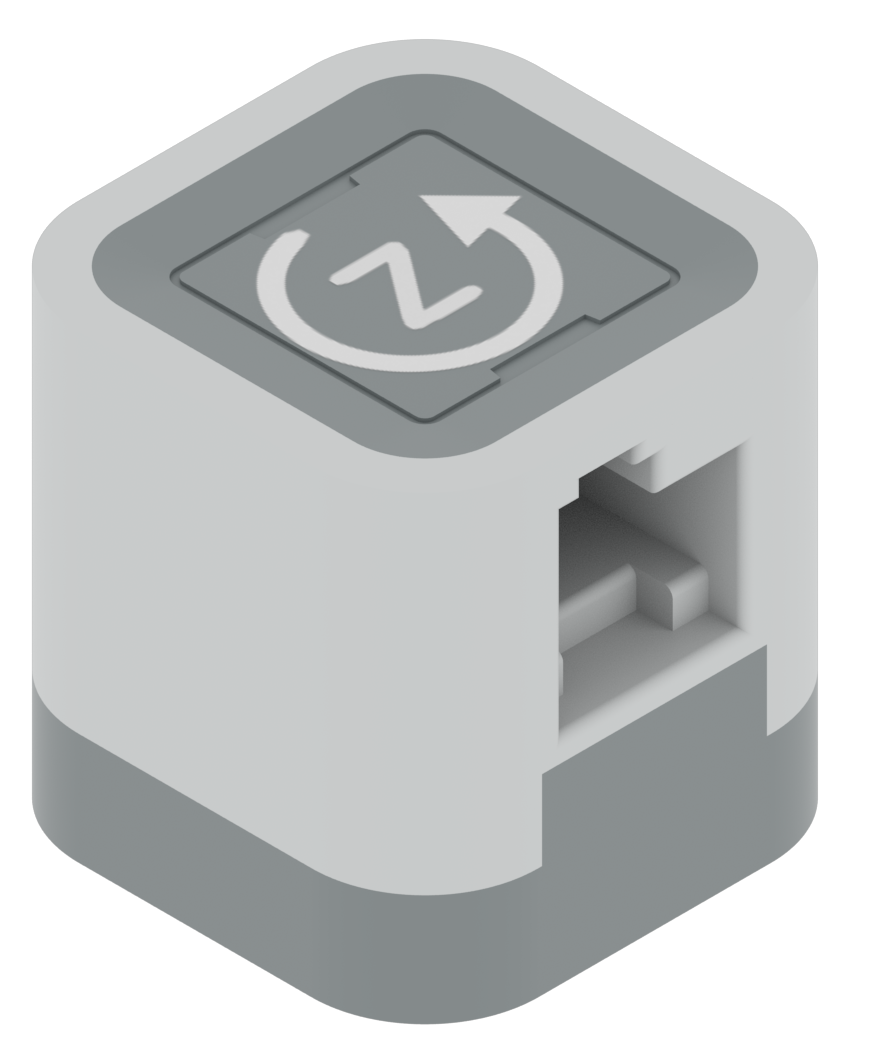
Interruptor de pára-choques
|
- Informa ao robô se seu amortecedor está pressionado (valor do sensor 1) ou liberado (valor do sensor 0).
|
- Detectar se o robô colidiu com um objeto, como uma parede de labirinto ou um objeto de jogo
- Acionando uma ação do robô, quando pressionado ou liberado.
- Alternando para ligar ou desligar motores quando pressionado.
- Detectar outras partes do robô, como um braço, quando ele pressiona o para-choque.
|
|
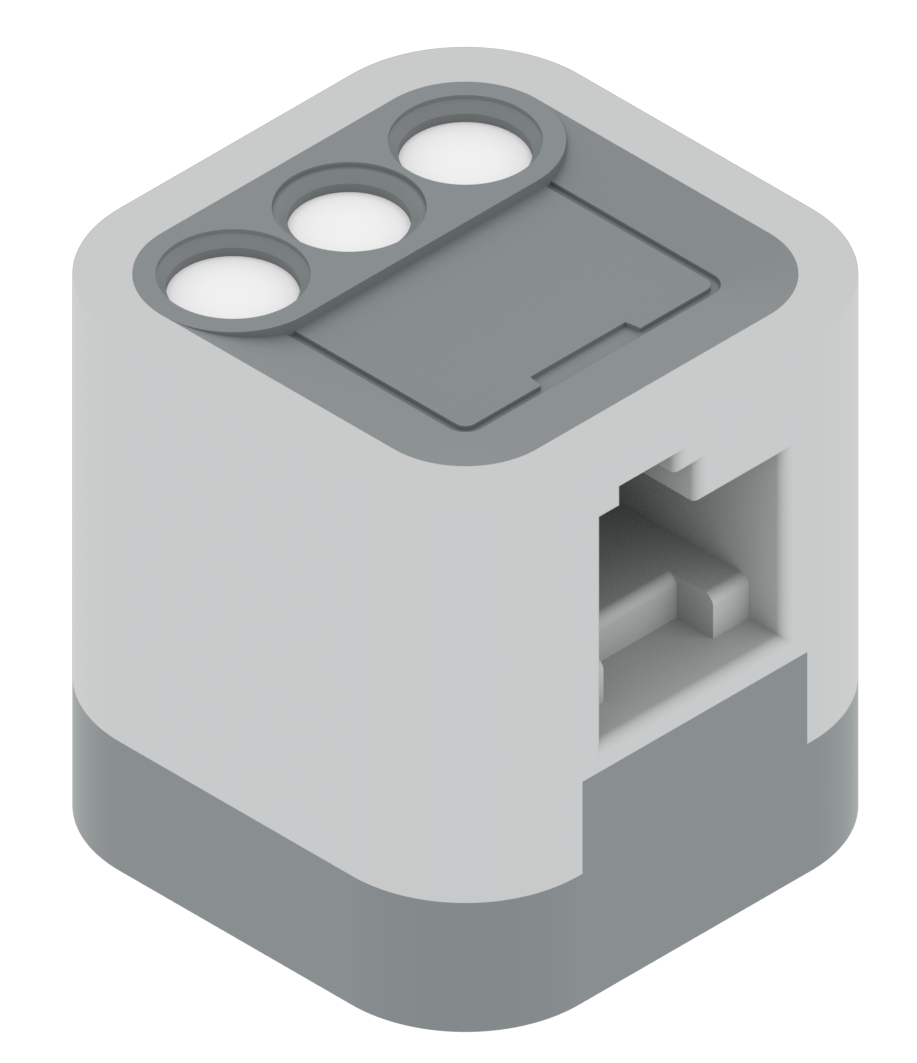
LED de toque

|
- Pode detectar toque capacitivo, como o toque de um dedo.
- Pode ser configurado para exibir muitas cores.
|
- Acionando uma ação do robô quando tocado
- Iniciar ou pausar um programa quando tocado
- Exibindo cores diferentes durante diferentes partes de um programa, facilitando a localização do código para solução de problemas.
|
|
Sensor de cores
|
-
Usa luz refletida para detectar a presença de um objeto
- cor
- valor de matiz
- valor da escala de cinza
- brilho
- proximidade.
|
- Interagir com um item de uma determinada cor, como ao classificar objetos por cor.
- Determinar o valor numérico da tonalidade de um objeto colorido. Esses dados podem ser úteis na solução de problemas do sensor de cores em diversas condições de iluminação.
- Compreender como o Sensor detecta cores em diversas condições de iluminação.
- Detectando uma linha
- Detectando se um objeto está presente
|
|
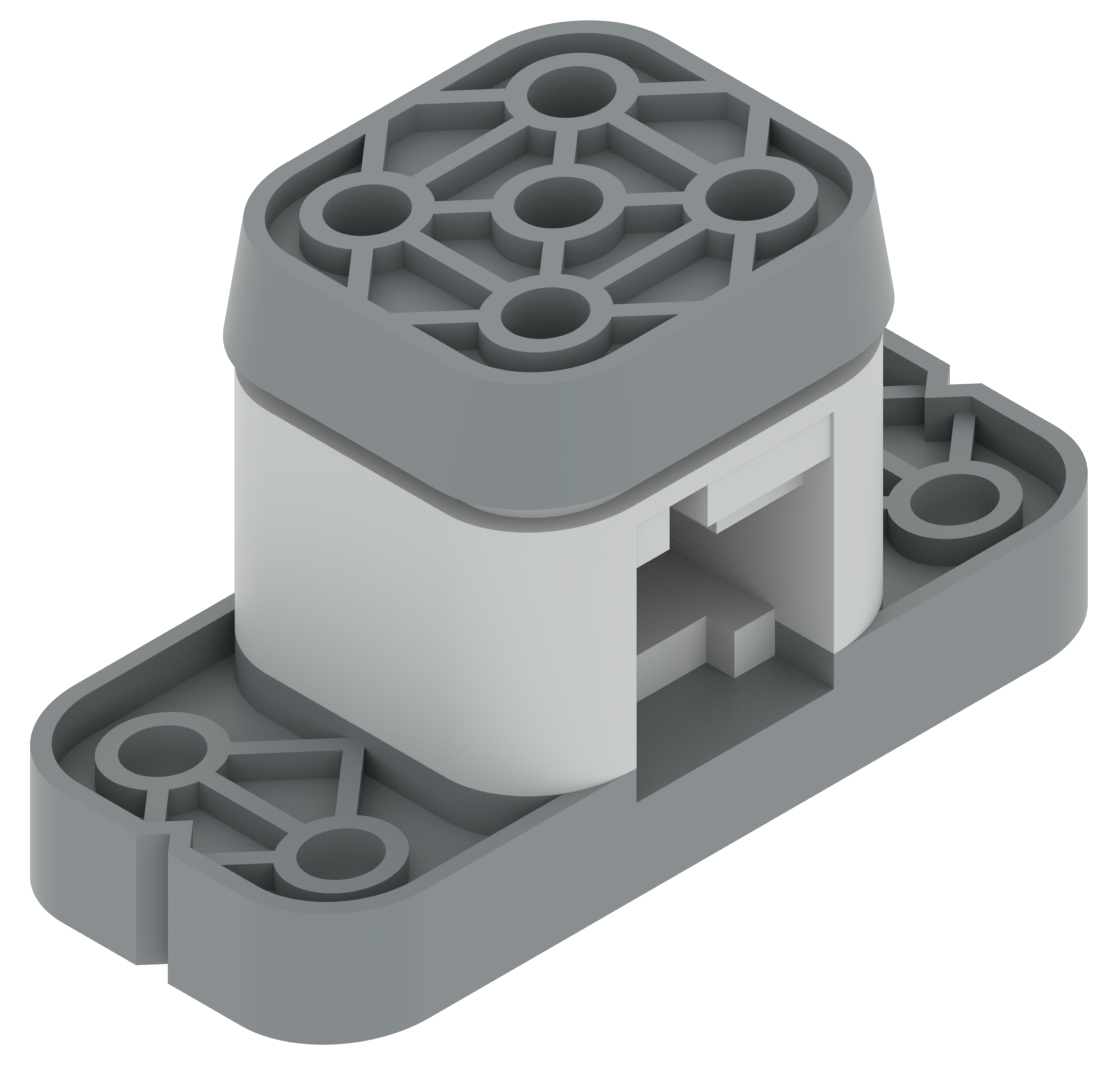
Sensor giroscópio
|
- Detecta a velocidade e rotação do robô
|
- Mantendo a direção reta
- Fazendo curvas precisas
|
|
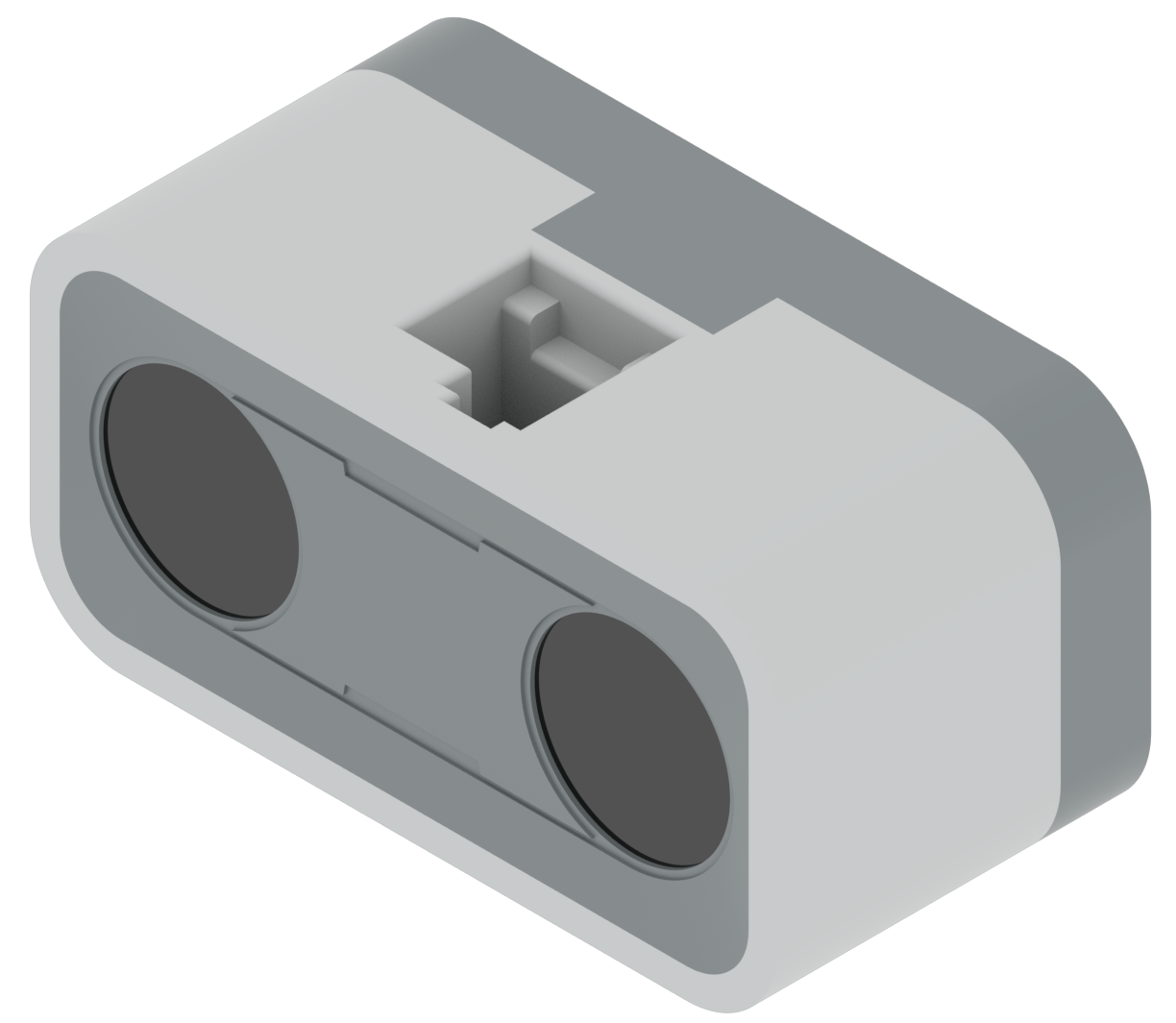
Sensor de distância
|
- Detecta se há um objeto na frente dele
- Mede a distância entre ele e um objeto
|
- Dirigir até uma certa distância na frente de um objeto, como uma parede ou um objeto de jogo
- Seguindo em frente até detectar que está a uma certa distância de uma parede, parando então.
- Dirigindo até um objeto para pegá-lo.
- Afastar-se de um objeto ou superfície até atingir uma distância específica.
|
Informações adicionais sobre sensores
Para obter informações detalhadas sobre os sensores acima, consulte os seguintes artigos:
