
Chociaż laboratoria VEX IQ (2. generacji) STEM zostały zaprojektowane dla zestawu IQ (2. generacji), istnieje wiele sposobów nauczania laboratoriów STEM (2. generacji) za pomocą zestawu (1. generacji). W tym artykule zapewniamy zasoby pomocne w adaptacji laboratoriów STEM (2. generacji), dając Ci elastyczność w nauczaniu wszystkich laboratoriów IQ STEM za pomocą zestawu IQ (1. generacji).
Ogólne uwagi dotyczące nauczania jednostki laboratoryjnej STEM (2. generacji) za pomocą zestawów (1. generacji).
Struktura każdej jednostki laboratoryjnej STEM IQ (2. generacji) opiera się na kulminacyjnym konkursie w klasie STEM. Lekcje jednostkowe mają przewidywalny format: nauka – praktyka – rywalizacja, z lekcją podsumowującą, która łączy naukę uczniów z karierą w dziedzinach STEM w prawdziwym życiu. Podstawowe sekcje, które będą wymagały dostosowania, to sugerowane kompilacje i szablony zalecane w lekcji wprowadzającej oraz kilka mniejszych adaptacji zasobów Ucz się i ćwicz, aby uwzględnić wykorzystanie kompilacji (1. generacji).
- Zobacz ten artykuł , aby uzyskać więcej informacji na temat formatu jednostki laboratoryjnej IQ (2. generacji) STEM.
- Zapoznaj się z artykułami w tej sekcji Biblioteki STEM , aby uzyskać pomoc w konfigurowaniu i prowadzeniu konkursu laboratoryjnego STEM.
Na lekcji 1 każdej jednostki laboratoryjnej STEM (drugiej generacji) uczniowie proszeni są o sprawdzenie i naładowanie baterii w ramach przygotowań do zajęć w ramach jednostki. Procedura jest inna w przypadku akumulatora (1. generacji).
- Zobacz artykuły w tej sekcji Biblioteki STEM , aby uzyskać wskazówki dotyczące sprawdzania i ładowania akumulatora (1. generacji).
W poniższej sekcji opisano każdą jednostkę laboratoryjną STEM drugiej (generacji), wersję IQ (drugiej generacji) używaną w tym laboratorium oraz zgodną wersję IQ (pierwszej generacji), której można używać do wykonywania czynności laboratoryjnych. Zawarte są także sugestie dotyczące dostosowania sekcji „Graj” w każdym laboratorium.
- Wybierz nazwę kompilacji, aby otworzyć instrukcje kompilacji w nowym oknie.
Przeciąganie liny
Sprawdź, jak przewaga mechaniczna i środek masy wpływają na zdolność robota do ciągnięcia obiektów, i zaprojektuj najlepszego robota, który wygra zawody w przeciąganiu liny. Zobacz moduł laboratorium STEM w zakresie przeciągania liny.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
BaseBot 
|
Autopilot
|
Użyj szablonu autopilota (silnik układu napędowego 2) zamiast szablonu Basebot (silnik układu napędowego 2), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
Używaj przedmiotów w klasie, które ważą około 1 i 2 kilogramy (około 2 i 4 funtów) zamiast pojemników IQ Storage Bins, zgodnie z zaleceniami z lekcji 2 i 3, ćwiczeń i wyzwań. |
Tag zespołu Freeze
Sprawdź swoje umiejętności jazdy, prowadząc robota za pomocą kontrolera IQ, wybierz koła i dodaj czujniki, aby wziąć udział w zawodach Team Freeze Tag. Zobacz moduł laboratorium STEM Team Freeze Tag.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
|
BaseBot
|
Autopilot
|
W Lekcji 1 kroki ładowania i parowania kontrolera (1. generacji) różnią się nieco od wskazówek w sekcji Przygotowanie. Zobacz tę sekcję biblioteki STEM , aby uzyskać przydatne informacje na temat ładowania i parowania kontrolera (1. generacji). Użyj szablonu Autopilota (silnik układu napędowego 2) zamiast szablonu Basebot (silnik układu napędowego 2), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
W Lekcji 2 procedura uzyskiwania dostępu i uruchamiania programu kontroli kierowcy w mózgu (1. generacji) różni się nieco od kroków przedstawionych w części Nauka. Zapoznaj się z tym artykułem , aby zapoznać się z instrukcjami uruchomienia programu kontroli kierowcy za pomocą mózgu (1. generacji) i zaznajomienia z nim swoich uczniów ten proces. W lekcji 4 uczniowie dodają wyłącznik zderzakowy IQ do swojego robota, jednak autopilot ma już dwa zamontowane z tyłu. Poproś uczniów, aby usunęli jeden wyłącznik zderzaka i wycentrowali drugi zderzak, a następnie wykonywali ćwiczenia i zadania zgodnie ze wskazówkami. |
Piłka nożna robotów
Dowiedz się, jak stworzyć manipulator na swoim robocie, aby chwytać, podawać i zdobywać jak najwięcej bramek jako robot-piłkarz w zawodach Robot Soccer. Zobacz moduł laboratorium STEM Robot Soccer Soccer.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
Prosty Clawbot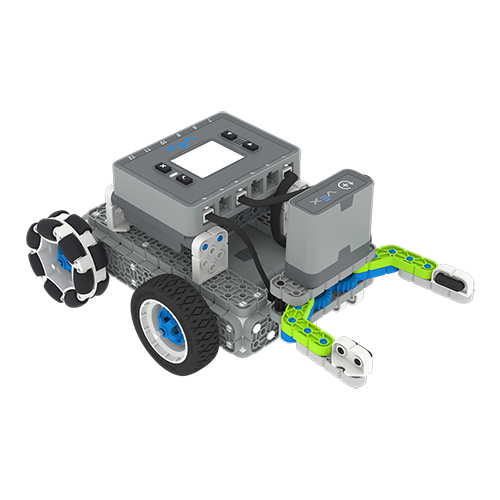
|
IQ Clawbota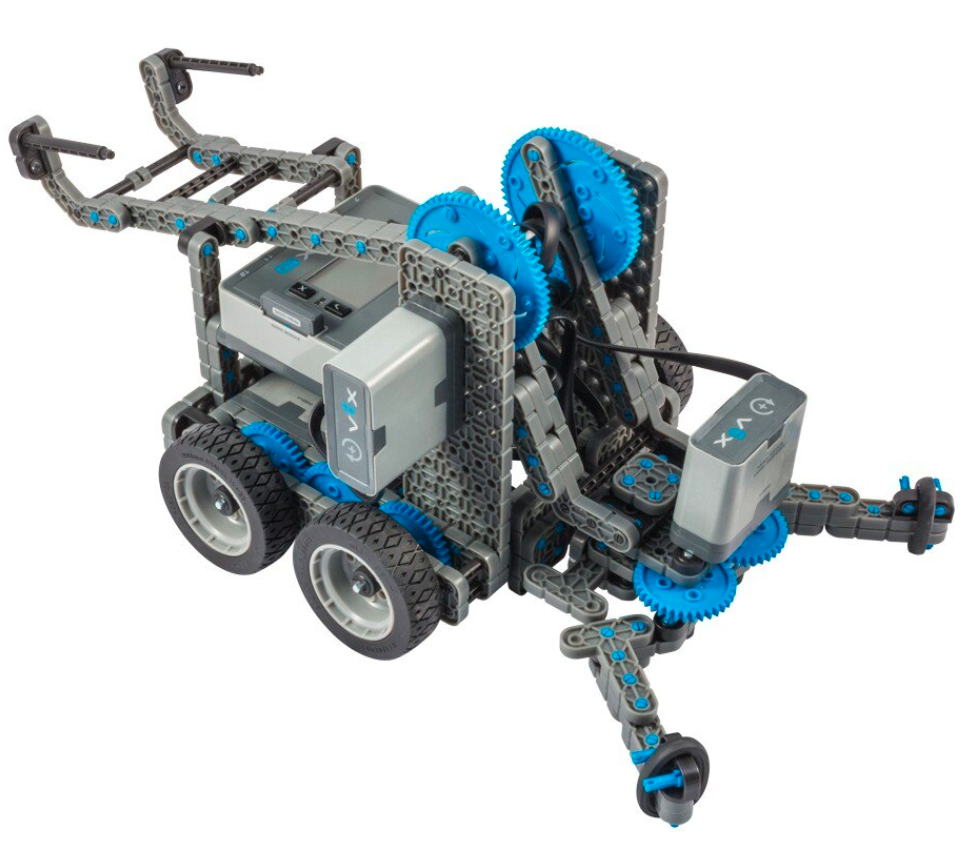
|
W Lekcji 1 kroki ładowania i parowania kontrolera (1. generacji) różnią się nieco od wskazówek w sekcji Przygotowanie. Zobacz tę sekcję biblioteki STEM , aby uzyskać przydatne informacje na temat ładowania i parowania kontrolera (1. generacji). Użyj szablonu Clawbot (1. generacji) (2-silnikowy układ napędowy) zamiast prostego Clawbot (2-silnikowy układ napędowy), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
|
Poszukiwanie skarbu
Zbuduj i zaprogramuj prostego Clawbota z czujnikiem optycznym, aby rozpoznawał i zbierał czerwone kostki, aby wziąć udział w konkursie Poszukiwania Skarbów. Zobacz moduł laboratoryjny STEM dotyczący poszukiwania skarbów.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
|
Prosty Clawbot
|
IQ Clawbota
|
Użyj szablonu Clawbot (1. generacji) (2-silnikowy układ napędowy) zamiast prostego Clawbot (2-silnikowy układ napędowy), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
Oprócz filmów edukacyjnych z lekcji 2 poproś uczniów o obejrzenie następujących samouczków dotyczących VEXcode IQ. Poruszanie pazurem Poruszanie ramieniem |
W górę i wszerz
Dowiedz się, jak zaprojektować Clawbota, który będzie zbierał, podnosił i przenosił kostki z jednej strony pola na drugą, biorąc udział w zawodach Up and Over. Zobacz tutaj moduł laboratorium STEM.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
Clawbot
|
IQ Clawbota
|
W Lekcji 1 kroki ładowania i parowania kontrolera (1. generacji) różnią się nieco od wskazówek w sekcji Przygotowanie. Zobacz tę sekcję biblioteki STEM , aby uzyskać przydatne informacje na temat ładowania i parowania kontrolera (1. generacji). Użyj szablonu Clawbot (2-silnikowy układ napędowy) (pierwszej generacji) zamiast Clawbot (2-silnikowy układ napędowy), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
|
Kolekcjoner kostek
Odkryj różnicę między kontrolą kierowcy a wyzwaniami autonomicznymi, ucząc się prowadzić Clawbota i kodować go, aby sortował i układał kostki w konkursie Cube Collector.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
| Clawbot |
IQ Clawbota
|
W Lekcji 1 kroki ładowania i parowania kontrolera (1. generacji) różnią się nieco od wskazówek w sekcji Przygotowanie. Zobacz tę sekcję biblioteki STEM , aby uzyskać przydatne informacje na temat ładowania i parowania kontrolera (1. generacji). Użyj szablonu Clawbot (1. generacji) (2-silnikowy układ napędowy) zamiast szablonu Clawbot (2. generacji) (2-silnikowy układ napędowy), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
W Lekcji 2 procedura uzyskiwania dostępu i uruchamiania programu kontroli kierowcy w mózgu (1. generacji) różni się nieco od kroków przedstawionych w części Nauka. Zapoznaj się z tym artykułem , aby zapoznać się z instrukcjami uruchomienia programu kontroli kierowcy za pomocą mózgu (1. generacji) i zaznajomienia z nim swoich uczniów ten proces. |
Rozbijacz Zamku
Dowiedz się, jak kodować pętle, aby robot mógł rowkować. Zobacz moduł laboratoryjny STEM Castle Crasher.
| (2. generacji) Kompilacja | Zalecana kompilacja (1. generacji). | Adaptacje |
|---|---|---|
BaseBot z czujnikami
|
Autopilot
|
Użyj szablonu autopilota (silnik układu napędowego 2) zamiast szablonu Basebot z czujnikami (silnik układu napędowego 2), zgodnie z zaleceniami z lekcji 1: Przygotowanie do kodowania.
Czujnik odległości IQ (2. generacji) został przedstawiony w części Lekcja 2: Nauka. Możesz wykorzystać informacje z tego artykułu o czujniku odległości (pierwszej generacji) , aby uzupełnić informacje dla swoich uczniów. |