This article is not viewable in your language. Please check back at a future date.
De vertaling van dit artikel is voltooid door middel van automatische vertaling. Vergeef alstublieft eventuele fouten.
Sensoren zorgen ervoor dat een robot feedback uit de omgeving kan ontvangen. Er zijn verschillende VEX IQ-sensoren (1e generatie) die kunnen worden gebruikt om verschillende soorten invoer voor de robot te verkrijgen. De onderstaande tabel geeft een overzicht van wat elke sensor kan doen, en voorbeelden van hoe deze in een project kan worden gebruikt.
VEX IQ (1e generatie) sensorvergelijkingstabel
| Sensor |
Functie |
Voorbeelden van toepassingen |
|
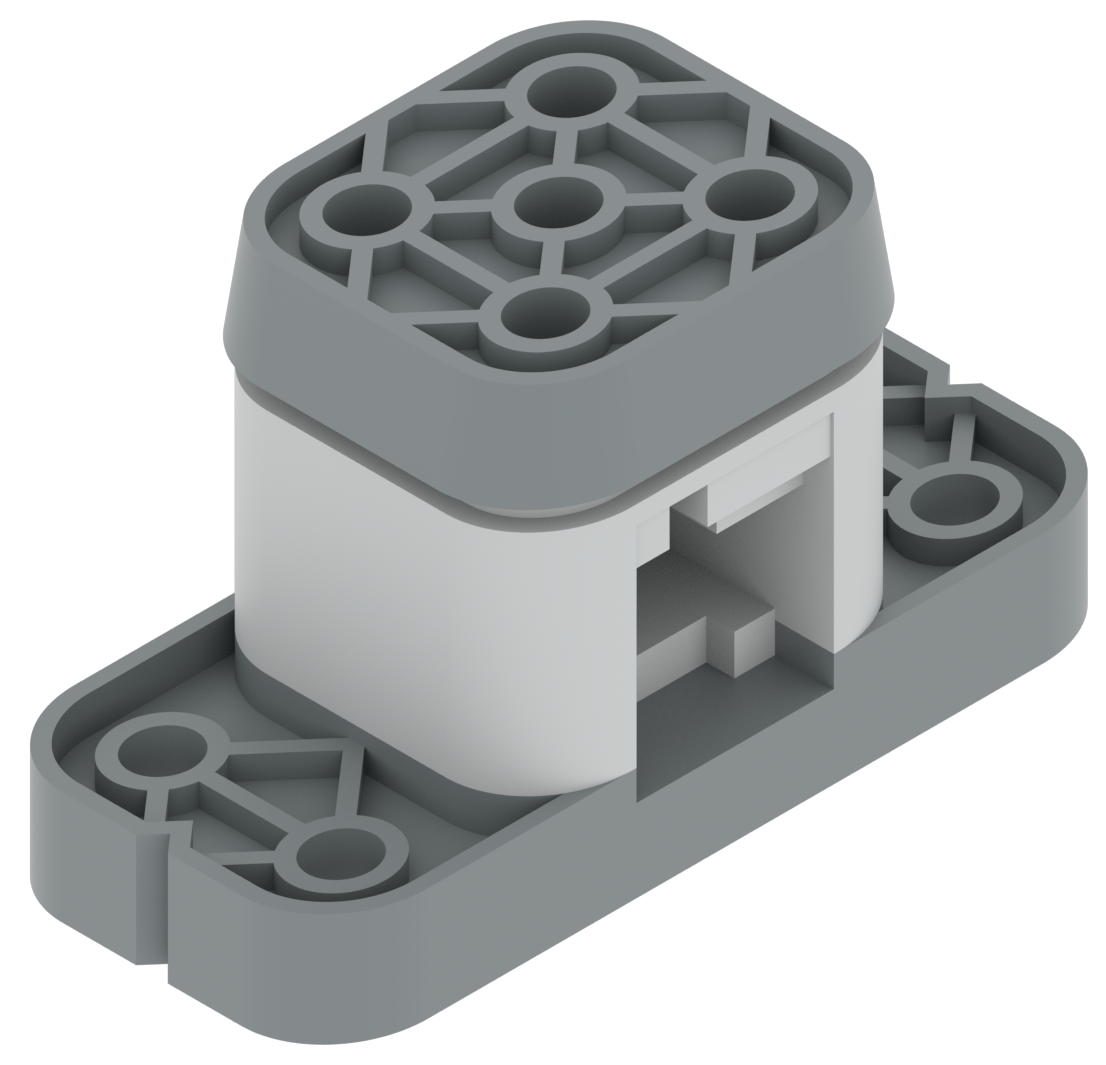
Bumperschakelaar
|
- Vertelt de robot of zijn bumper wordt ingedrukt (sensorwaarde 1) of losgelaten (sensorwaarde 0).
|
- Detecteren of de robot tegen een object is gebotst, zoals een doolhofmuur of een spelobject
- Een robotactie activeren, wanneer ingedrukt of losgelaten.
- Schakelen om motoren in of uit te schakelen wanneer ingedrukt.
- Het detecteren van andere delen van de robot, zoals een arm, wanneer deze in de bumper drukt.
|
|
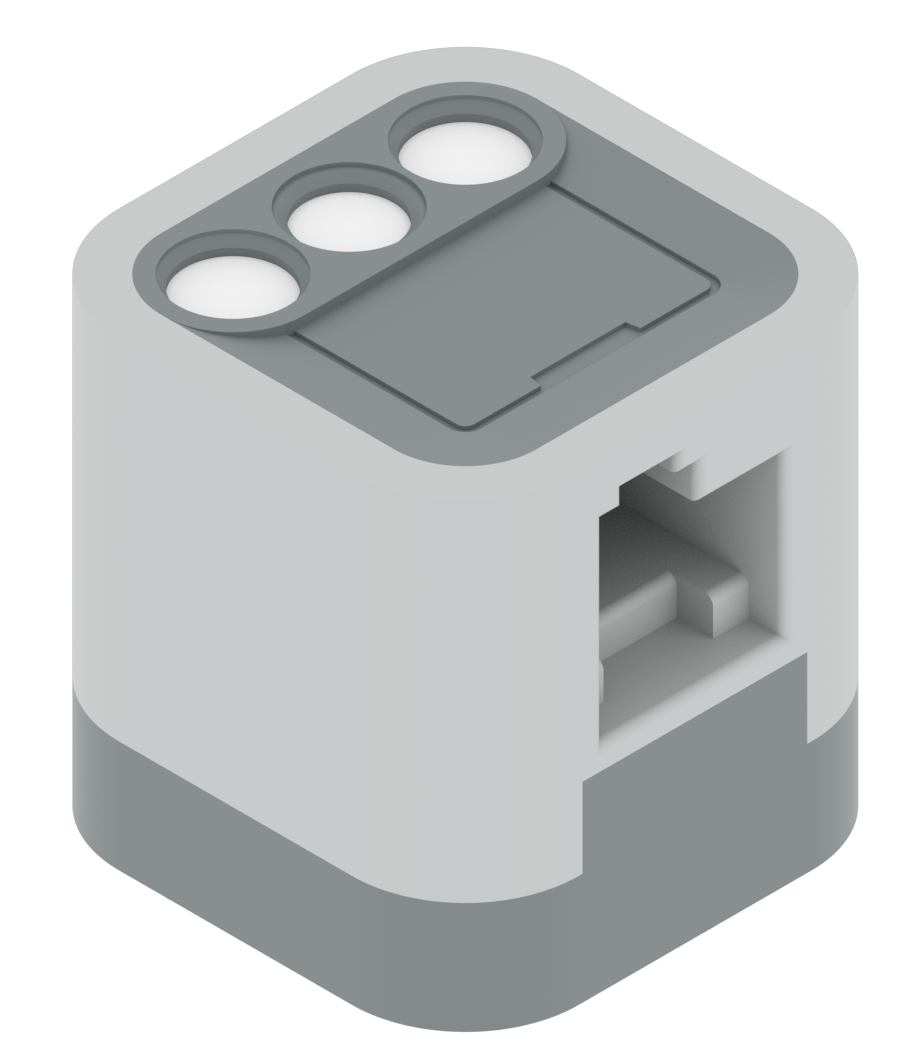
Raak LED aan

|
- Kan capacitieve aanrakingen detecteren, zoals de aanraking van een vinger.
- Kan worden ingesteld om veel kleuren weer te geven.
|
- Activeert een robotactie bij aanraking
- Een programma starten of pauzeren bij aanraking
- Het weergeven van verschillende kleuren tijdens verschillende delen van een programma, zodat het gemakkelijker is om de code te lokaliseren voor het oplossen van problemen.
|
|
Kleursensor
|
-
Gebruikt gereflecteerd licht om het licht van een object te detecteren
- kleur
- tint waarde
- grijswaardenwaarde
- helderheid
- nabijheid.
|
- Interactie met een item van een bepaalde kleur, zoals bij het sorteren van objecten op kleur.
- Bepalen van de numerieke tintwaarde van een gekleurd object. Deze gegevens kunnen nuttig zijn bij het oplossen van problemen met de kleurensensor onder uiteenlopende lichtomstandigheden.
- Begrijpen hoe de sensor kleur detecteert in uiteenlopende lichtomstandigheden.
- Een lijn detecteren
- Detecteren of een object aanwezig is
|
|
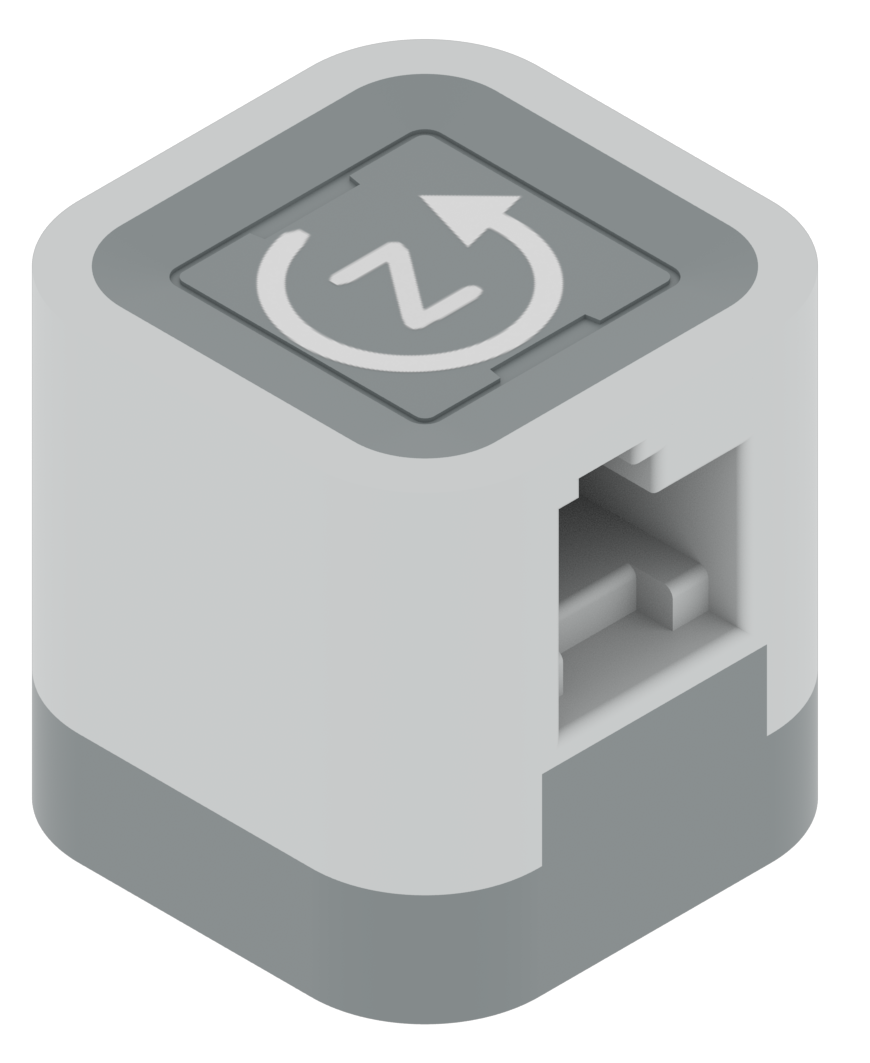
Gyro-sensor
|
- Detecteert de snelheid en rotatie van de robot
|
- Rechtdoor blijven rijden
- Nauwkeurige bochten maken
|
|
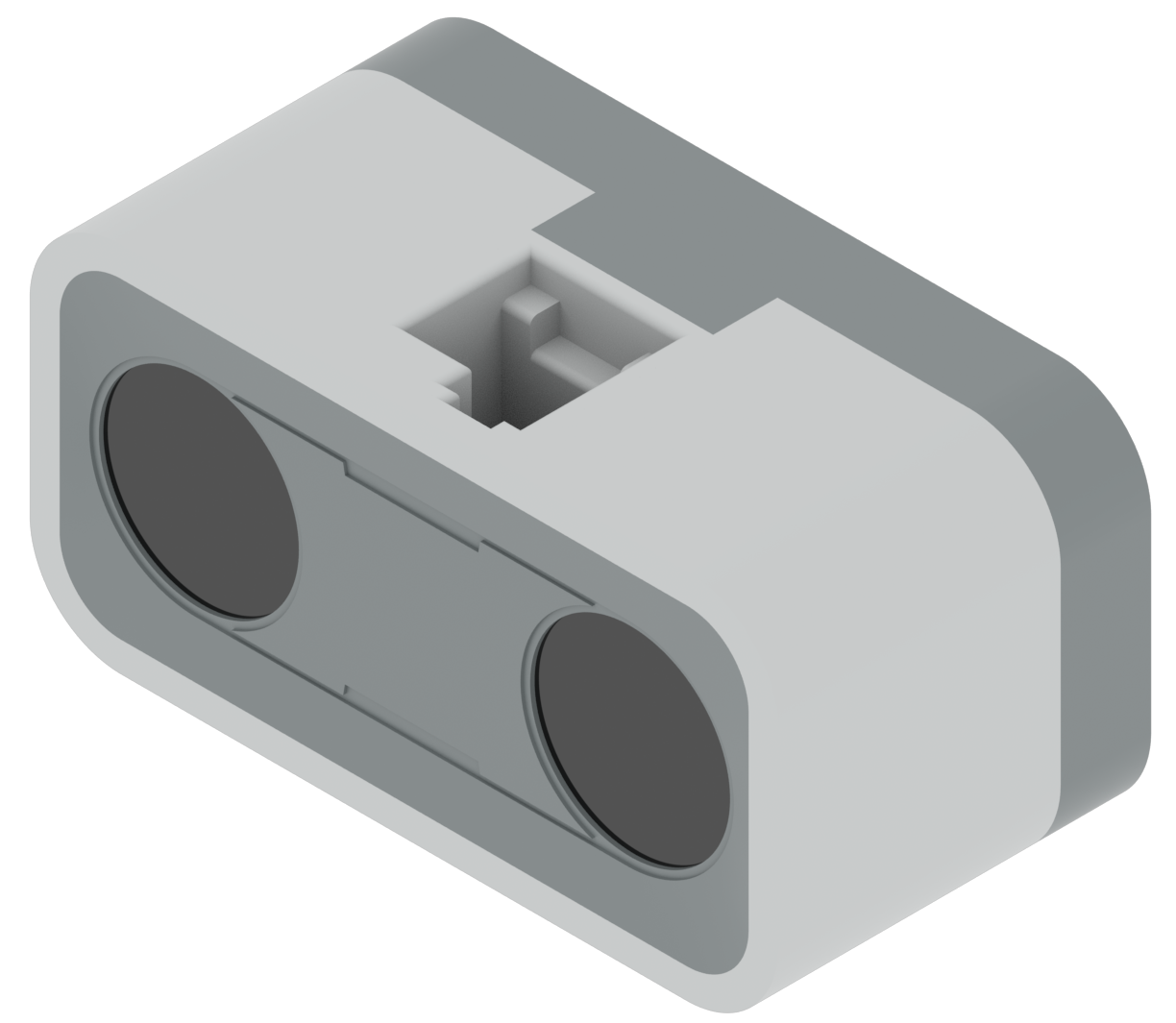
Afstandssensor
|
- Detecteert of er zich een object voor bevindt
- Meet de afstand tussen zichzelf en een object
|
- Tot een bepaalde afstand voor een object rijden, zoals een muur of een spelobject
- Hij rijdt vooruit totdat hij detecteert dat hij zich op een bepaalde afstand van een muur bevindt en stopt dan.
- Naar een object rijden om het op te halen.
- Wegrijden van een object of oppervlak totdat het een bepaalde afstand heeft bereikt.
|
Aanvullende sensorinformatie
Voor gedetailleerde informatie over de bovenstaande sensoren, zie de volgende artikelen:
