This article is not viewable in your language. Please check back at a future date.
ഈ ലേഖനത്തിന്റെ വിവർത്തനം മെഷീൻ വിവർത്തനം വഴിയാണ് പൂർത്തിയാക്കിയത്. സാധ്യമായ പിശകുകൾ ക്ഷമിക്കുക.
ഒരു റോബോട്ടിന് പരിസ്ഥിതിയിൽ നിന്ന് പ്രതികരണം സ്വീകരിക്കാനുള്ള കഴിവ് സെൻസറുകൾ നൽകുന്നു. റോബോട്ടിന് വ്യത്യസ്ത തരം ഇൻപുട്ടുകൾ ലഭിക്കുന്നതിന് ഉപയോഗിക്കാവുന്ന വിവിധതരം VEX IQ (രണ്ടാം തലമുറ) സെൻസറുകൾ ഉണ്ട്. ഓരോ സെൻസറിനും എന്തുചെയ്യാൻ കഴിയും എന്നതിന്റെ ഒരു അവലോകനവും ഒരു പ്രോജക്റ്റിൽ അത് എങ്ങനെ ഉപയോഗിക്കാമെന്നതിന്റെ ഉദാഹരണങ്ങളും താഴെയുള്ള പട്ടിക നൽകുന്നു.
VEX IQ (രണ്ടാം തലമുറ) സെൻസർ താരതമ്യ പട്ടിക
| സെൻസർ |
ഫംഗ്ഷൻ |
ഉദാഹരണ ഉപയോഗങ്ങൾ |
|
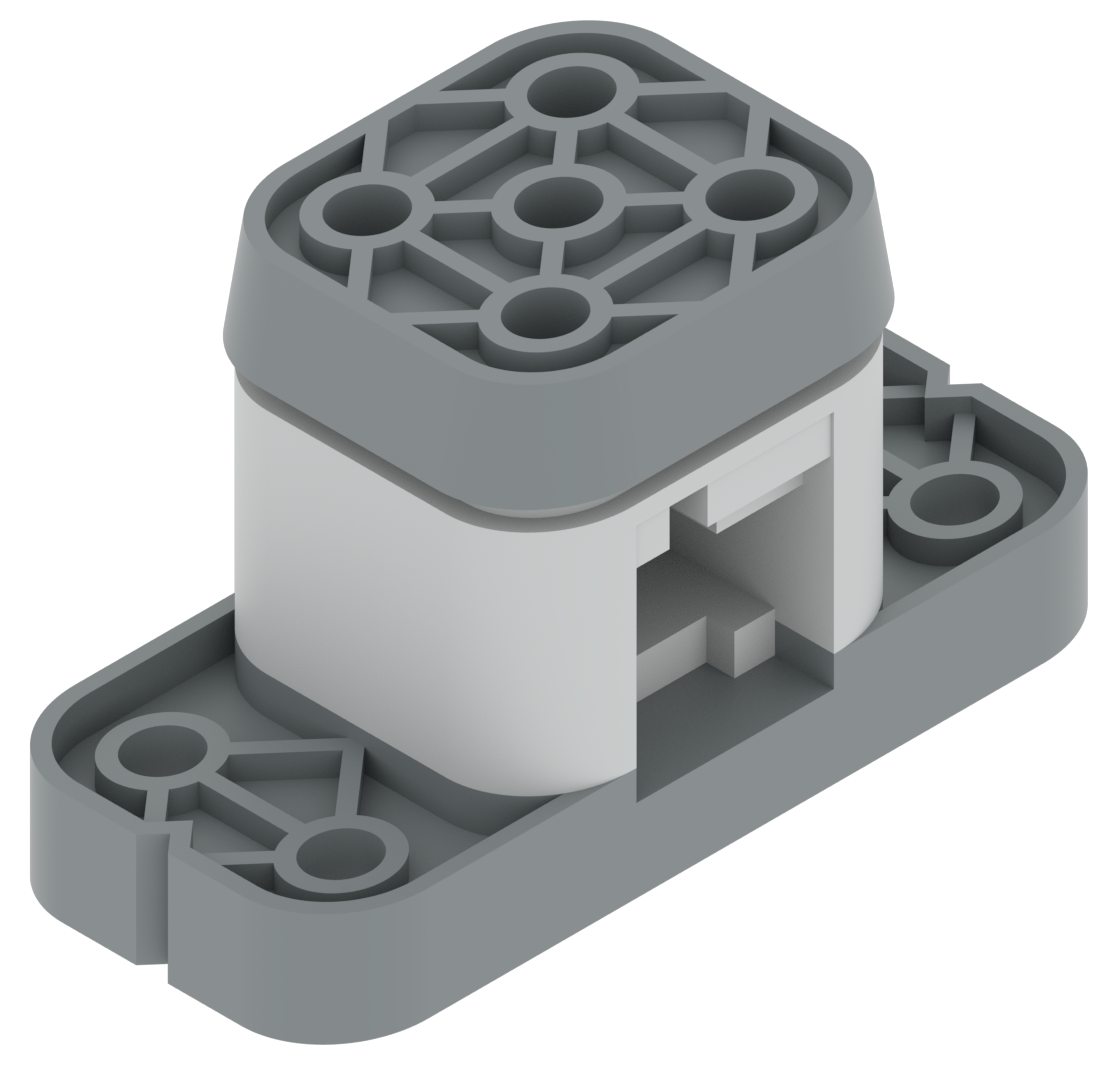
ബമ്പർ സ്വിച്ച്
|
- റോബോട്ടിനോട് അതിന്റെ ബമ്പർ അമർത്തണോ (സെൻസർ മൂല്യം 1) അതോ റിലീസ് ചെയ്യണോ (സെൻസർ മൂല്യം 0) എന്ന് പറയുന്നു.
|
- ഒരു മേസ് വാൾ അല്ലെങ്കിൽ ഗെയിം ഒബ്ജക്റ്റ് പോലുള്ള ഒരു വസ്തുവിൽ റോബോട്ട് ഇടിച്ചിട്ടുണ്ടോ എന്ന് കണ്ടെത്തൽ.
- അമർത്തുമ്പോഴോ വിടുമ്പോഴോ ഒരു റോബോട്ട് പ്രവർത്തനം ട്രിഗർ ചെയ്യുന്നു
- അമർത്തുമ്പോൾ മോട്ടോറുകൾ ഓൺ അല്ലെങ്കിൽ ഓഫ് ചെയ്യാൻ ടോഗിൾ ചെയ്യുന്നു
- ബമ്പറിൽ അമർത്തുമ്പോൾ റോബോട്ടിന്റെ മറ്റ് ഭാഗങ്ങൾ, ഉദാഹരണത്തിന് ഒരു കൈ, കണ്ടെത്തൽ.
|
|
ടച്ച് LED

|
- ഒരു വിരലിന്റെ സ്പർശനം പോലുള്ള കപ്പാസിറ്റീവ് സ്പർശനം തിരിച്ചറിയാൻ കഴിയും.
- നിരവധി നിറങ്ങൾ പ്രദർശിപ്പിക്കാൻ സജ്ജമാക്കാൻ കഴിയും.
|
- സ്പർശിക്കുമ്പോൾ ഒരു റോബോട്ട് പ്രവർത്തനം ട്രിഗർ ചെയ്യുന്നു
- സ്പർശിക്കുമ്പോൾ ഒരു പ്രോഗ്രാം ആരംഭിക്കുകയോ താൽക്കാലികമായി നിർത്തുകയോ ചെയ്യുക
- ഒരു പ്രോഗ്രാമിന്റെ വിവിധ ഭാഗങ്ങളിൽ വ്യത്യസ്ത നിറങ്ങൾ പ്രദർശിപ്പിക്കുന്നതിലൂടെ, പ്രശ്നപരിഹാരത്തിനായി കോഡ് കൃത്യമായി കണ്ടെത്തുന്നത് എളുപ്പമാണ്.
|
|
ഒപ്റ്റിക്കൽ സെൻസർ

|
-
ഒരു വസ്തുവിന്റെ നിറം തിരിച്ചറിയുക
-
ഒരു വസ്തുവിനെ കണ്ടെത്തുക
-
ആംബിയന്റ് ലൈറ്റ് തെളിച്ച നില കണ്ടെത്തുക
-
ഒരു വസ്തുവിന്റെ സംഖ്യാപരമായ ഹ്യൂ മൂല്യം അളക്കുക
- ചുറ്റുമുള്ള പ്രകാശ സാഹചര്യങ്ങൾ പരിഗണിക്കാതെ നിറങ്ങൾ കണ്ടെത്തുമ്പോൾ സെൻസറിലെ വെളുത്ത LED-കൾക്ക് സ്ഥിരതയുള്ള പ്രകാശ സ്രോതസ്സ് നൽകാൻ കഴിയും.
|
- ഒരു പ്രത്യേക നിറത്തിലുള്ള ഒരു ഇനവുമായി പ്രത്യേകമായി സംവദിക്കാൻ റോബോട്ടിനെ കോഡ് ചെയ്യുന്നു, ഉദാഹരണത്തിന് ക്യൂബുകളെ നിറം അനുസരിച്ച് തരംതിരിക്കുക.
- ചുമരോ കളിവസ്തുവോ പോലുള്ള ഒരു വസ്തു നിലവിലുണ്ടോ എന്ന് കണ്ടെത്തൽ.
- പ്രകാശ നില ഒരു നിശ്ചിത തെളിച്ചത്തിലായിരിക്കുമ്പോൾ ഒരു പെരുമാറ്റം നടത്താൻ റോബോട്ടിനെ പ്രേരിപ്പിക്കുന്നു.
- വ്യത്യസ്ത ലൈറ്റിംഗ് സാഹചര്യങ്ങളിൽ ഒപ്റ്റിക്കൽ സെൻസർ എങ്ങനെ നിറം കണ്ടെത്തുന്നുവെന്ന് കൃത്യമായി മനസ്സിലാക്കുന്നു.
- ഒരു വരി പിന്തുടരുന്നു
- ഒരു വസ്തു നിലവിലുണ്ടോ എന്ന് കണ്ടെത്തൽ
|
|
ദൂര സെൻസർ

|
- മുന്നിൽ ഒരു വസ്തു ഉണ്ടോ എന്ന് കണ്ടെത്തുന്നു.
- ഒരു വസ്തുവും അതിലേക്കുള്ള ദൂരം അളക്കുന്നു
- ഒരു വസ്തുവിന്റെ ആപേക്ഷിക വലിപ്പം നിർണ്ണയിക്കുക
- ഒരു വസ്തുവിന്റെ പ്രവേഗം റിപ്പോർട്ട് ചെയ്യുന്നു
|
- ഒരു ഭിത്തിയിൽ നിന്ന് ഒരു നിശ്ചിത അകലത്തിലാണെന്ന് സെൻസർ കണ്ടെത്തുന്നതുവരെ മുന്നോട്ട് ഓടിച്ചുകൊണ്ട് പോകുക, തുടർന്ന് ഡ്രൈവിംഗ് നിർത്തുക.
- ഒരു ഗെയിം വസ്തു എടുക്കാൻ ഒരു നിശ്ചിത ദൂരം മുന്നോട്ട് വാഹനമോടിക്കുക
- ഒരു പ്രത്യേക ദൂരം എത്തുന്നതുവരെ ഒരു വസ്തുവിൽ നിന്നോ ഉപരിതലത്തിൽ നിന്നോ അകന്നു പോകുക
- ഒരു വലുപ്പമുള്ള ഒരു വസ്തുവുമായി ഇടപഴകുകയും മറ്റൊരു വലുപ്പമുള്ള ഒരു വസ്തുവുമായി ഇടപഴകുന്നത് ഒഴിവാക്കുകയും ചെയ്യുക, ഉദാഹരണത്തിന് ഒരു ഫീൽഡിലെ ചെറിയ പന്തുകൾ മാത്രം എടുക്കുക.
- അടുത്തുവരുന്ന ഒരു വസ്തുവിന്റെ വേഗത നിർണ്ണയിക്കുകയും അത് തലച്ചോറിന്റെ സ്ക്രീനിൽ അച്ചടിക്കുകയും ചെയ്യുന്നു.
|
അധിക സെൻസർ വിവരങ്ങൾ
ശ്രദ്ധിക്കുക, ഐക്യു (രണ്ടാം തലമുറ) തലച്ചോറിന് ഗൈറോ സെൻസറിനേക്കാൾ ഒരു ബിൽറ്റ്-ഇൻ ഇനേർഷ്യൽ സെൻസർ ആണ് ഉള്ളത്. IQ (രണ്ടാം തലമുറ) സെൻസറുകളെക്കുറിച്ചുള്ള വിശദമായ വിവരങ്ങൾക്ക്, ഇനിപ്പറയുന്ന ലേഖനങ്ങൾ കാണുക:
