This article is not viewable in your language. Please check back at a future date.
Šī raksta tulkojums tika pabeigts ar mašīntulkošanu. Lūdzu, piedodiet par iespējamām kļūdām.
Sensori nodrošina iespēju robotam saņemt atgriezenisko saiti no vides. Ir dažādi VEX IQ (1. paaudzes) sensori, kurus var izmantot, lai iegūtu dažāda veida ievades robotam. Tālāk esošajā tabulā ir sniegts pārskats par to, ko katrs sensors var darīt, un piemēri, kā to var izmantot projektā.
VEX IQ (1. paaudzes) sensoru salīdzināšanas tabula
| Sensors |
Funkcija |
Izmantošanas piemēri |
|
Bufera slēdzis
|
- Norāda robotam, vai tā buferis ir nospiests (sensora vērtība 1) vai atlaista (sensora vērtība 0).
|
- Atklāj, vai robots ir uzdūries kādam priekšmetam, piemēram, labirinta sienai vai spēles objektam
- Robota darbības aktivizēšana, nospiežot vai atlaižot.
- Pārslēdzas, lai ieslēgtu vai izslēgtu motorus, kad tas tiek nospiests.
- Citu robota daļu, piemēram, rokas, noteikšana, kad tas nospiež buferi.
|
|
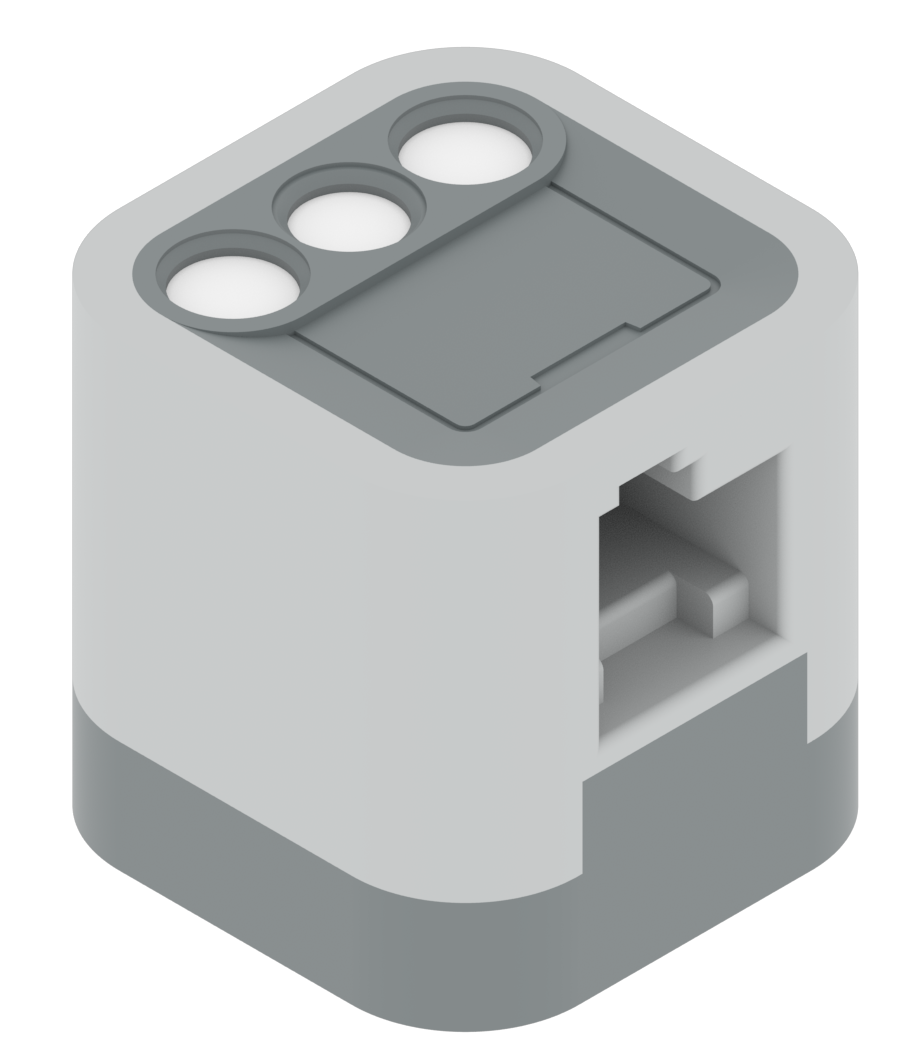
Pieskarieties LED

|
- Var noteikt kapacitatīvu pieskārienu, piemēram, pirksta pieskārienu.
- Var iestatīt, lai parādītu daudzas krāsas.
|
- Pieskaroties, tiek aktivizēta robota darbība
- Programmas palaišana vai pauze, kad tiek pieskarties
- Dažādās programmas daļās tiek rādītas dažādas krāsas, tāpēc ir vieglāk noteikt kodu problēmu novēršanai.
|
|
Krāsu sensors
|
-
Izmanto atstaroto gaismu, lai noteiktu objektu
- krāsa
- nokrāsas vērtība
- pelēktoņu vērtība
- spilgtumu
- tuvums.
|
- Mijiedarbība ar noteiktas krāsas priekšmetu, piemēram, kārtojot objektus pēc krāsas.
- Krāsaina objekta nokrāsas skaitliskās vērtības noteikšana. Šie dati var būt noderīgi, veicot krāsu sensora traucējummeklēšanu dažādos apgaismojuma apstākļos.
- Izpratne par to, kā sensors nosaka krāsu dažādos apgaismojuma apstākļos.
- Līnijas noteikšana
- Nosaka, vai objekts ir klāt
|
|
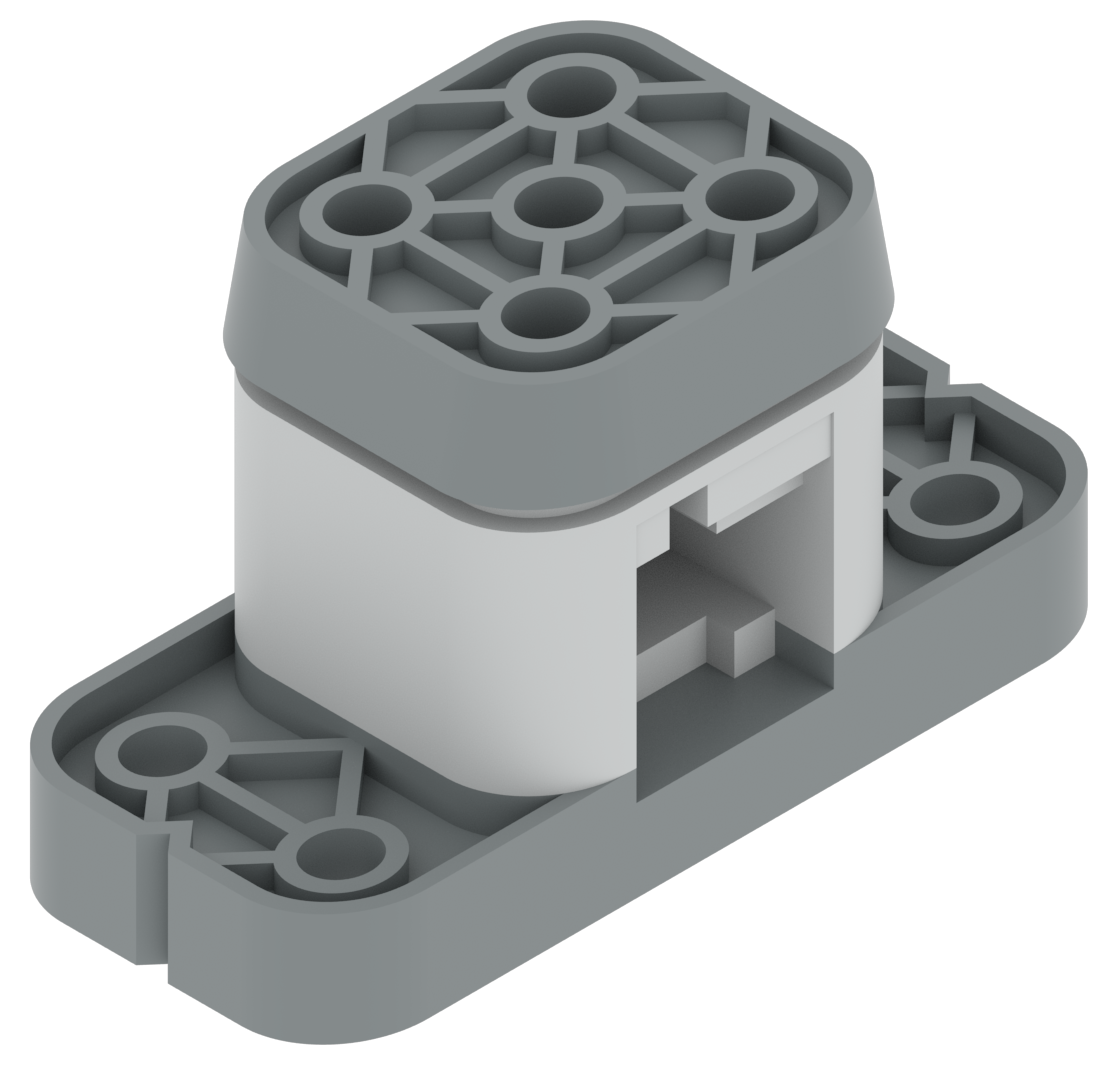
Žiro sensors
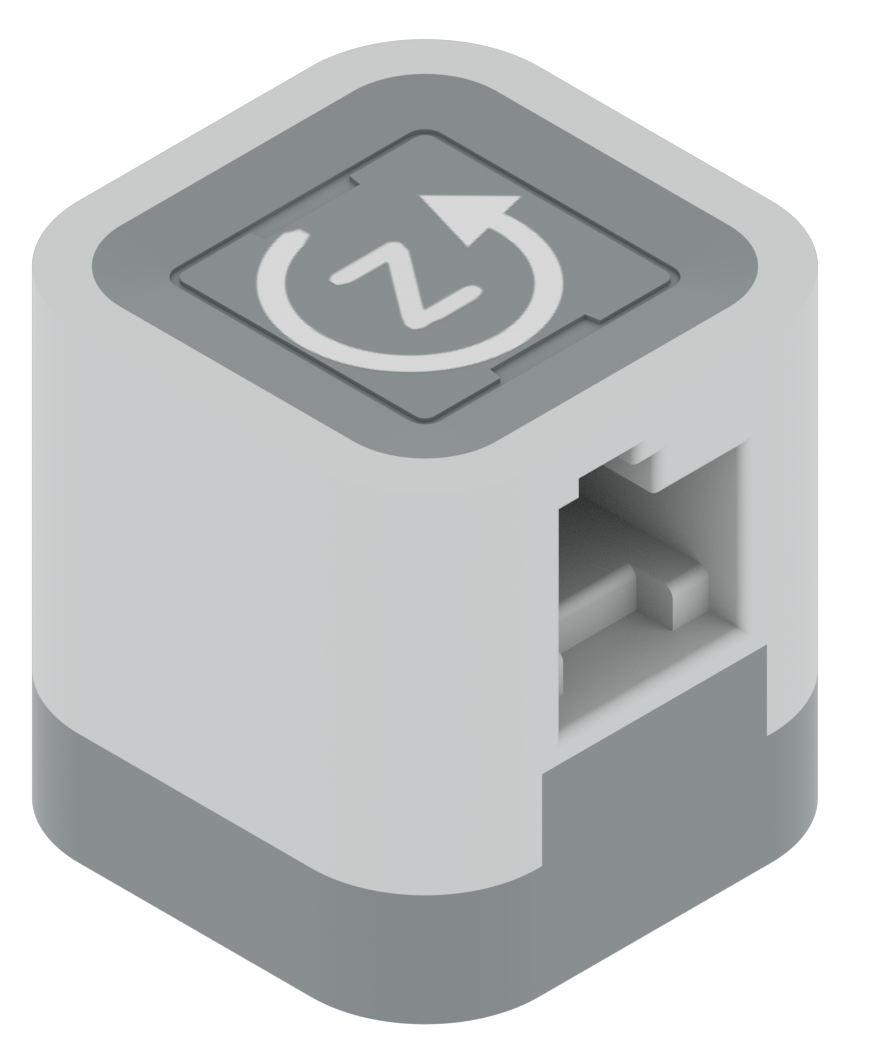
|
- Nosaka robota ātrumu un rotāciju
|
- Taisnas braukšanas uzturēšana
- Precīzu pagriezienu veikšana
|
|
Attāluma sensors
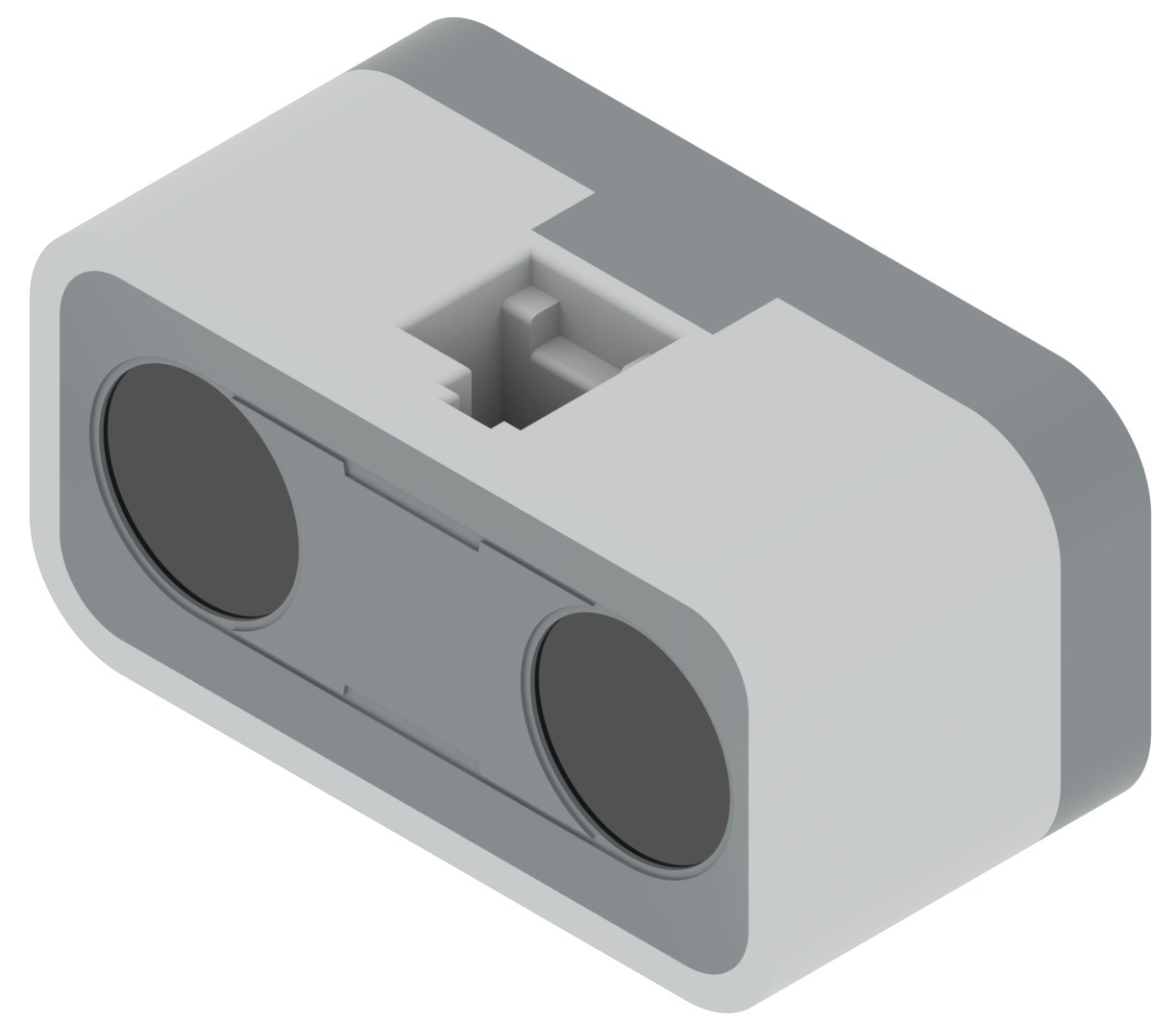
|
- Nosaka, vai tā priekšā ir kāds objekts
- Mēra attālumu starp sevi un objektu
|
- Braukšana noteiktā attālumā kāda objekta priekšā, piemēram, sienas vai spēles priekšmeta
- Brauc uz priekšu, līdz konstatē, ka atrodas noteiktā attālumā no sienas, pēc tam apstāšanās.
- Braukšana uz objektu, lai to paņemtu.
- Braukšana prom no objekta vai virsmas, līdz tā ir sasniegusi noteiktu attālumu.
|
Papildu informācija par sensoru
Lai iegūtu detalizētu informāciju par iepriekš minētajiem sensoriem, skatiet šos rakstus:
