This article is not viewable in your language. Please check back at a future date.
Šio straipsnio vertimas buvo baigtas mašininiu vertimu. Atleiskite už visas galimas klaidas.
Jutikliai suteikia robotui galimybę gauti grįžtamąjį ryšį iš aplinkos. Yra įvairių VEX IQ (1-osios kartos) jutiklių, kurie gali būti naudojami norint gauti įvairių tipų įvesties robotui. Toliau pateiktoje lentelėje apžvelgiama, ką kiekvienas jutiklis gali padaryti, ir pavyzdžiai, kaip jį galima naudoti projekte.
VEX IQ (1-osios kartos) jutiklių palyginimo lentelė
| Jutiklis |
Funkcija |
Naudojimo pavyzdžiai |
|
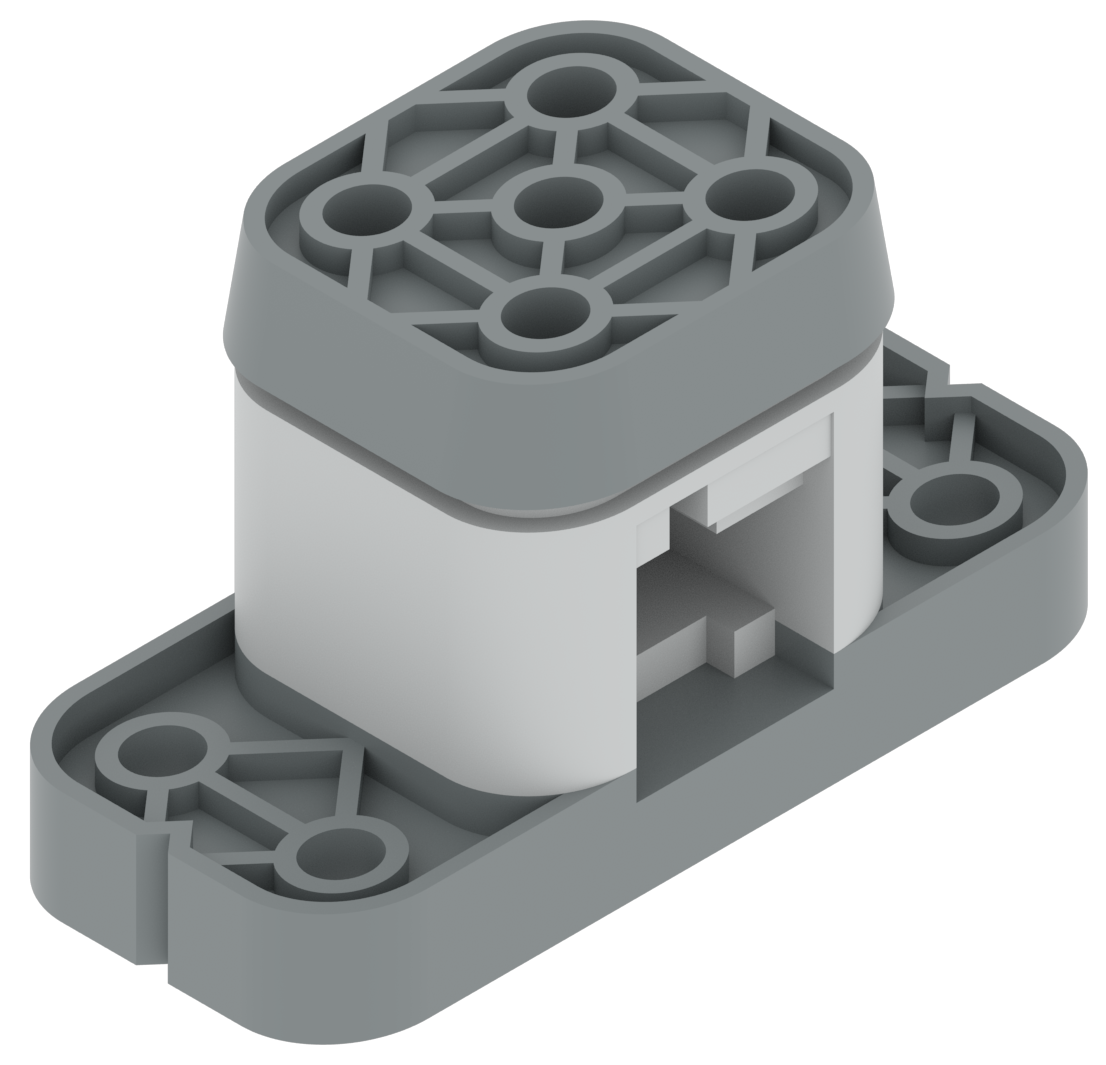
Buferio jungiklis
|
- Nurodo robotui, ar jo buferis paspaustas (jutiklio reikšmė 1), ar atleista (jutiklio reikšmė 0).
|
- Aptikimas, ar robotas atsitrenkė į objektą, pvz., labirinto sieną ar žaidimo objektą
- Roboto veiksmo suaktyvinimas, kai paspaudžiamas arba atleidžiamas.
- Paspaudus variklius įjungia arba išjungia.
- Aptikti kitas roboto dalis, pvz., ranką, kai jis paspaudžia buferį.
|
|
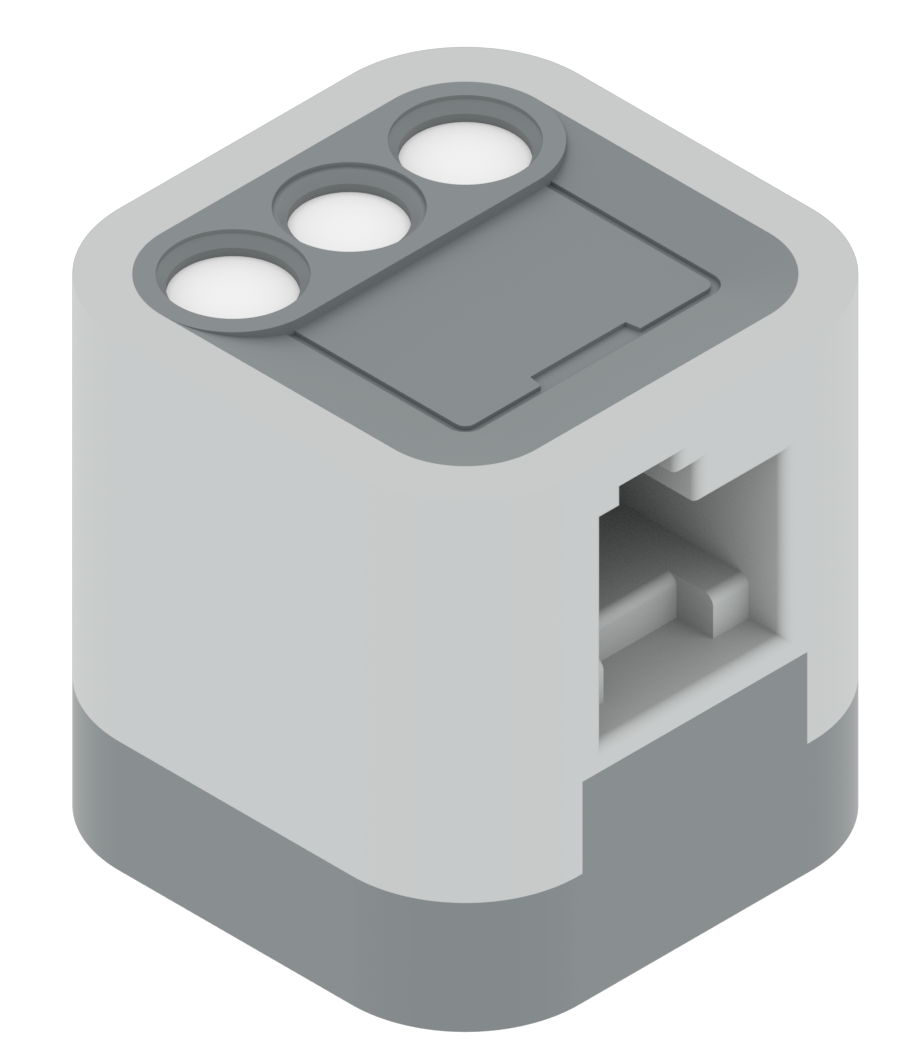
Palieskite LED

|
- Gali aptikti talpinį prisilietimą, pvz., prisilietimą pirštu.
- Galima nustatyti, kad būtų rodoma daug spalvų.
|
- Palietus suaktyvinamas roboto veiksmas
- Programos paleidimas arba pristabdymas palietus
- Skirtingose programos dalyse rodomos skirtingos spalvos, todėl lengviau nustatyti kodą trikčių šalinimui.
|
|
Spalvos jutiklis
|
-
Objektui aptikti naudoja atspindėtą šviesą
- spalva
- atspalvio vertė
- pilkos spalvos reikšmė
- ryškumą
- artumas.
|
- Sąveika su tam tikros spalvos daiktu, pavyzdžiui, rūšiuojant objektus pagal spalvą.
- Spalvoto objekto skaitinės atspalvio reikšmės nustatymas. Šie duomenys gali būti naudingi sprendžiant spalvų jutiklio triktis esant įvairioms apšvietimo sąlygoms.
- Supratimas, kaip jutiklis aptinka spalvą įvairiomis apšvietimo sąlygomis.
- Linijos aptikimas
- Aptikimas, ar objektas yra
|
|
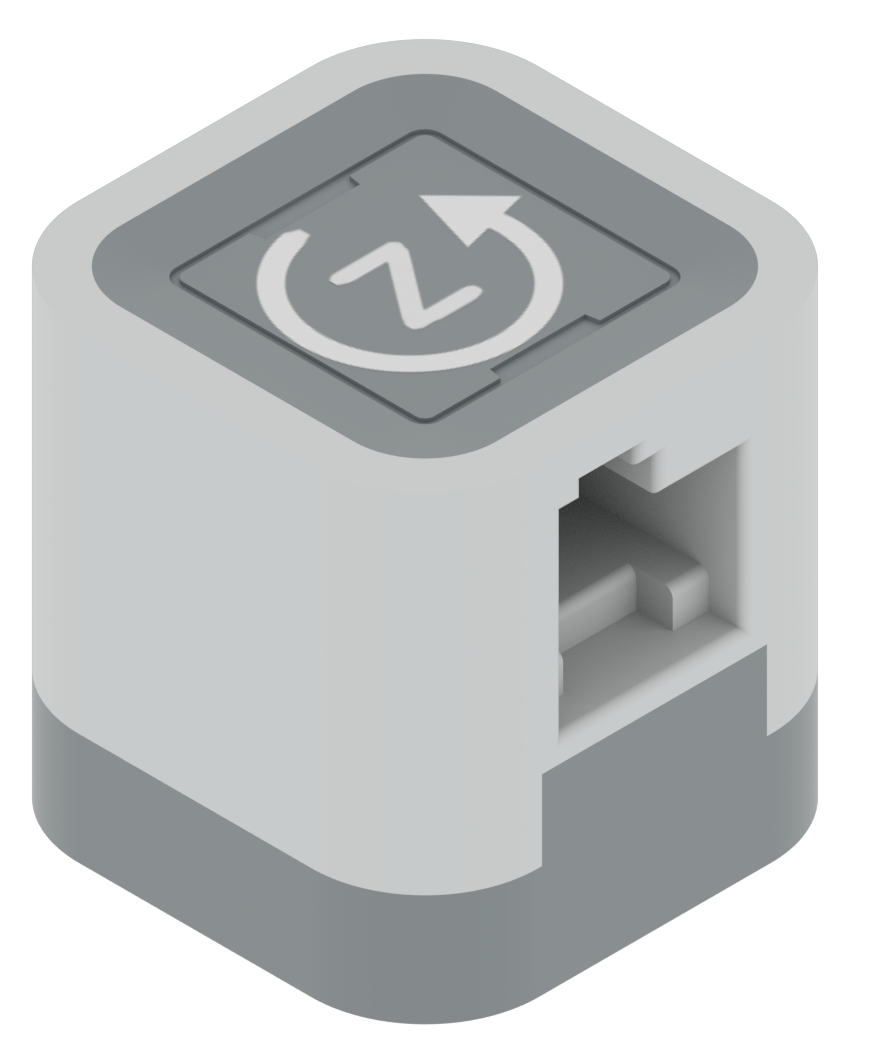
Giroskopo jutiklis
|
- Aptinka roboto greitį ir sukimąsi
|
- Tiesaus vairavimo palaikymas
- Tikslūs posūkiai
|
|
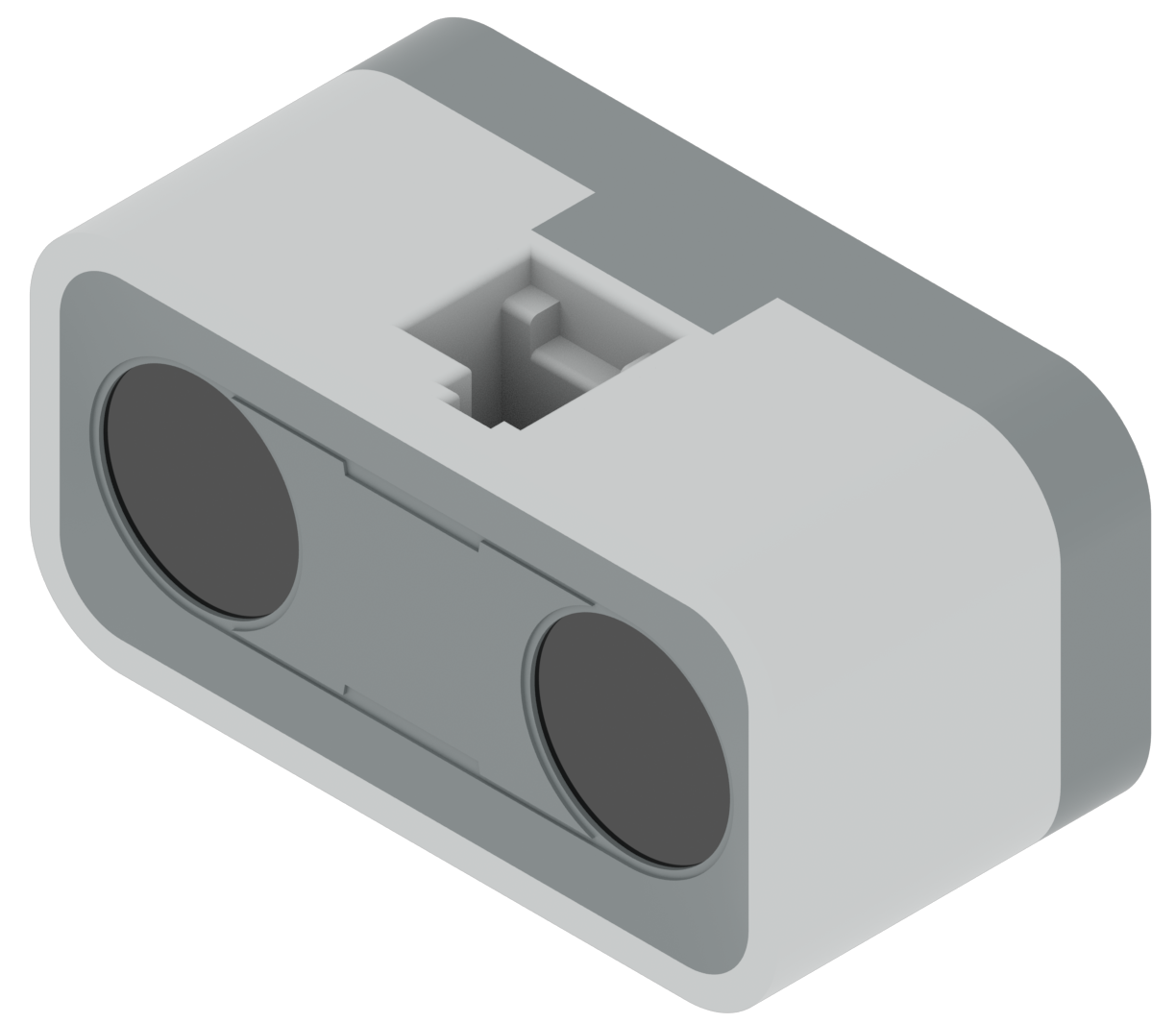
Atstumo jutiklis
|
- Aptinka, ar priešais jį yra koks nors objektas
- Matuoja atstumą tarp savęs ir objekto
|
- Važiavimas tam tikru atstumu priešais objektą, pvz., sieną ar žaidimo objektą
- Važiuoja į priekį, kol nustato, kad yra tam tikru atstumu nuo sienos, tada sustoja.
- Važiavimas prie objekto jo pasiimti.
- Važiavimas nuo objekto ar paviršiaus tol, kol jis pasieks tam tikrą atstumą.
|
Papildoma jutiklio informacija
Išsamios informacijos apie anksčiau pateiktus jutiklius rasite šiuose straipsniuose:
