This article is not viewable in your language. Please check back at a future date.
이 기사의 번역은 기계 번역으로 완료되었습니다. 가능한 오류를 용서해 주십시오.
1단계: 필요한 부품을 수집합니다.

- 다음 부품이 필요합니다.
- (1) V5 스마트 모터(표시되지 않음)
- (2) #8-32 x 1/2" 나사
- (1) 5-64" 육각 키
- (1) 3-32" 육각 키
- (1) 샤프트 커플러
- (1) 1/2" 샤프트
2단계: V5 Smart Motor로 업데이트하세요.
- Clawbot에서 393 모터 중 하나를 제거하십시오.
- 이 예에서는 클로 암의 움직임을 구동하는 V5 스마트 모터에 중점을 둡니다.
- V5 스마트 모터의 위치를 테스트합니다. 그 자리에 맞아야합니다.
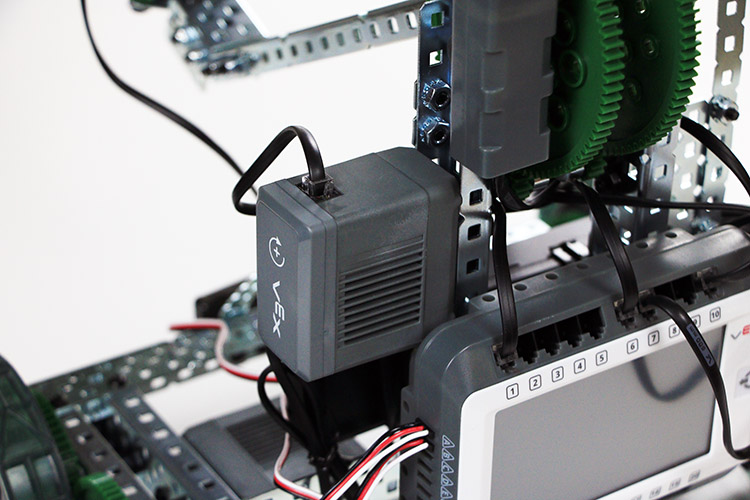
3단계: V5 Smart Motor를 고정하고 V5 Robot Brain에 연결합니다.
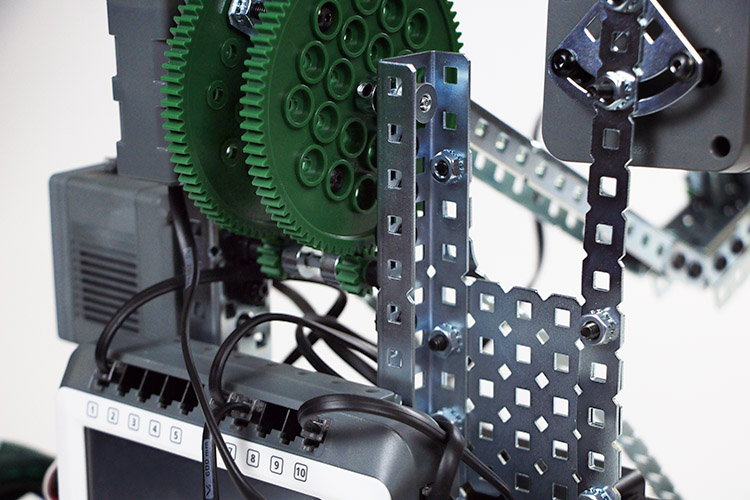
- 조립한 도구를 사용하여 V5 Clawbot의 팔 지지 구조 중앙 근처, 이전 모터가 있던 위치에 V5 Smart Motor를 단단히 장착합니다.
- 모터가 올바르게 정렬되고 기어를 돌릴 수 있도록 장착되었는지 확인하십시오.
- 스마트 케이블을 사용하여 새 V5 Smart Motor를 V5 Robot Brain의 포트 8에 연결하세요.
