This article is not viewable in your language. Please check back at a future date.
この記事の翻訳は機械翻訳によって完了しました。多少の誤差はご容赦ください。
V5 STEM ラボは VEX V5 キット用に設計され、SPARK 形式に従っていますが、EXP キットを使用してこれらの STEM ラボを教える方法はたくさんあります。 この記事では、V5 STEM ラボの適応に役立つリソースを提供し、V5 と EXP STEM ラボの両方のユニットを柔軟に指導できるようにします。
EXP と V5 STEM ラボの両方を教室に組み込む方法については、EXP 累積ペースガイドをご覧
EXPキットを用いたV5 STEMラボの指導における全体的な考慮事項
V5 STEM Lab は SPARK 形式に従います。 各セクションとその内容の詳細については、この記事を してください これらのラボを EXP で使用できるように調整する場合、いくつかの包括的な調整を行うことができます。
-
シーク: 以下のリンクにある EXP のビルド手順に従ってください。
-
遊び:遊び活動の適応については、「適応」セクションで概説します。
-
適用:このセクションはそのままでかまいません。
-
再考:再考課題に対する適応については、「適応」セクションで概説します。
-
知っている:このセクションはそのままで構いません。
STEM Labs のコーディングの「再生」セクションでは、VEXcode V5 のセットアップとその他の情報について説明します。 VEXcode EXP のダウンロードと使用方法については、この記事のセクションを参照して
次のセクションでは、V5 STEM ラボ、そのユニットに使用される V5 ビルド、および練習と課題のアクティビティを完了するために使用できる互換性のある EXP ビルドを示します。 また、「遊び」と「再考」アクティビティを各ラボに適応させるための提案も含まれています。
ロボラリー
学生は、比例推論と尺度を使用して、Speedbot のレース コースを設計するように求められます。 Robo Rally STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
スピードボット
|
ベースボット
|
-
Play: BaseBot を測定してスケールを作成します。
-
再考: 適応は必要ありません。
|
ロボサッカー
生徒は、ボールをドリブルするロボットを構築て使用し、その設計を繰り返します。0 Robosoccer STEM Lab の教師用バージョンは、こちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
スピードボット
|
ベースボット
|
-
プレイ: バッキーボールを使ってコースを作成します。
-
再考: チャレンジを完了するには、サッカー ボールの代わりにバッキーボールを使用できます。
|
メドボット
学生たちは、自分たちが作成した病院のフロアで患者に薬を届けるロボットをプログラムするよう求められます。 Medbot STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
スピードボット
|
ベースボット
|
-
Play: VEXcode EXP の BaseBot (ドライブトレイン 2 モーター) テンプレートを使用します。
 - VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
再考: 生徒が擬似コードを開発する際には、この記事の手順を使用してください。
|
勢いの路地
学生たちは力についての知識を利用してボウリングのピンを倒すロボットをコーディングします。 Momentum Alley STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
スピードボット
|
ベースボット
|
-
Play: VEXcode EXP の BaseBot (ドライブトレイン 2 モーター) テンプレートを使用します。
- VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
- ボールにはバッキーボールを使用。
- ロボットの前面に C チャネルを追加して、バッキーボールとの衝突を改善します。
|
それは引き分けです
生徒たちは Clawbot を探索し、それを描画ゲームの芸術ツールとして使用します。 It's a Draw STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
再生: マーカーの配置には、同様の輪ゴムアタッチメントを使用します。 または、EXP キットの追加ピースを使用してマーカー取り付けピースをデザインします。
-
再考: 適応は必要ありません。
|
スピーディな配達
学生は、倉庫内を移動し、配達用の荷物を準備するロボットをプログラムするように求められます。 Speedy Delivery STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
プレイ: VEXcode EXP の Clawbot (ドライブトレイン 2 モーター ドライブトレイン) テンプレートを使用します。
 - VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
|
リクエストによるデザイン
学生は、無制限の構築アクティビティのエンジニアリング設計プロセスを体験します。 Design By Request STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
該当なし。 これは、STEM Lab の一部としてのカスタム ビルドです。
|
該当なし。 これは、STEM Lab の一部としてのカスタム ビルドです。
|
-
Seek: この Seek セクションを完了し、エンジニアリング ノートブックで同じ質問に答える EXP キットを調べてください。
-
プレイ: 適応は必要ありません。
-
再考: 適応は必要ありません。
|
ループ、そこにある!
学生はロボットに溝を作るためのループをプログラムする方法を学びます。 ループの教師バージョンをご覧ください。そこにあります! STEMラボはこちら
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
遊ぶ:
- VEXcode EXP の Clawbot (ドライブトレイン 2 モーター ドライブトレイン) テンプレートを使用します。
- 次に、ラボに表示されているプロジェクトを作成します。
- VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
|
グラビティラッシュ
学生はレースの準備をしながら、Clawbot と重心の問題について調べます。 Gravity Rush STEM Labの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
遊ぶ:
- ロボットが V5 クローボットよりも小さいため、クローボットのアームを上げる場合、ラボの最低高さ要件を満たさない可能性があります。
- 最初の角度付きアームのテストでは、シャーシと平行になるようにアームを持ち上げる必要があります。
- 垂直に近いアームテストでは、アームを可能な限り高い位置まで上げる必要があります。
-
考え直してください:
-
- 2 ラウンド目では、Clawbot のアームをシャーシと平行になるように持ち上げる必要があります。
- 3 ラウンド目では、Clawbot のアームを可能な限り高い位置に上げる必要があります。
|
やるべきか、やらないべきか
学生は、ロボットが条件に基づいて動作するようにプログラムするように求められます。 ループの教師バージョンをご覧ください。そこにあります! STEMラボはこちら
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
遊ぶ:
- 「Play」セクションのテキストでは、Brain 画面を押すことに言及しています。 EXP Brain はタッチに反応しないため、このアクティビティでは Brain のボタンを使用します。
- VEXcode EXP の Clawbot (ドライブトレイン 2 モーター ドライブトレイン) テンプレートを使用します。
- 次に、ラボに示されているプロジェクトに基づいてこのプロジェクトを作成します。 これは、アクティビティを通じて他のプロジェクト編集の基礎として使用できます。
- [If then] ブロックを追加して、Brain で左ボタンが押されたときの 2 番目のコマンドを追加します。
- VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
- EXP Brain では 3 つのボタンをコーディングできます。 4 つのボタンとコマンドではなく、この 3 つを使用します。
- ツメを閉じるためのボタン
- 腕を上げるためのボタン
- 腕を下げるためのボタン
- 課題を完了するときは、生徒が手動で爪を開けることができるようにする必要があります。
- 生徒が疑似コードを開発する際には、この記事の手順を使用してください。
|
コントローラー付きクローボット
学生は、ループの概念を使用して、いくつかの魅力的な課題を通じて Clawbot を指示するコントローラーをコーディングします。 コントローラー付きクローボットSTEMラボの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
遊ぶ:
- VEXcode EXP の Tank Drive Control サンプル プロジェクトを使用します。
- VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
- VEXcode EXP の Clawbot コントローラーとイベントのサンプル プロジェクトを使用します。
|
視覚センサー
学生は視覚センサーを使用して物体を検出します。 ビジョンセンサーSTEMラボの教師用バージョンはこちらをご覧ください
| V5 ビルド |
推奨EXPビルド |
適応 |
クローボット
|
クローボット
|
-
求める:
- アングルガセットを使用して、ビジョンセンサーをクローボットの上部に爪に向かって下向きに取り付けます。
-
遊ぶ:
- VEXcode EXP の Detecting Objects (Vision) サンプル プロジェクトを使用します。
- VEXcode EXP 関連のヘルプについては、この記事のセクションを参照して
- VEXcode EXP では、ブロック、Python、C++ を使用したコーディングが利用可能で、好みのコーディング方法に応じてそれぞれを使用できます。
-
考え直してください:
|
メカニカルアドバンテージ
学生は、機械的な利点とギア比を自分の体づくり、日常生活、ロボット競技会にどのように応用できるかを探ります。 Mechanical Advantage STEM Lab の教師用バージョンはこちらをご覧ください
注: EXP バージョンには特定のビルド手順がないため、このラボは完了するのがより困難です。 学生は、EXP バージョンを作成するために構築中に指示を適応させる最適な方法を決定する必要があります。 これは、工学分野で上級の学生に推奨されます。
| V5 ビルド |
推奨EXPビルド |
適応 |
|
V5 ギアボックス
|
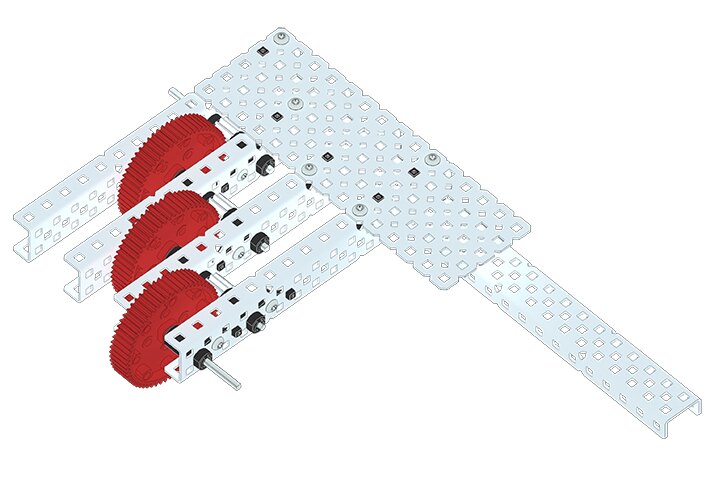
カスタムEXPギアボックス
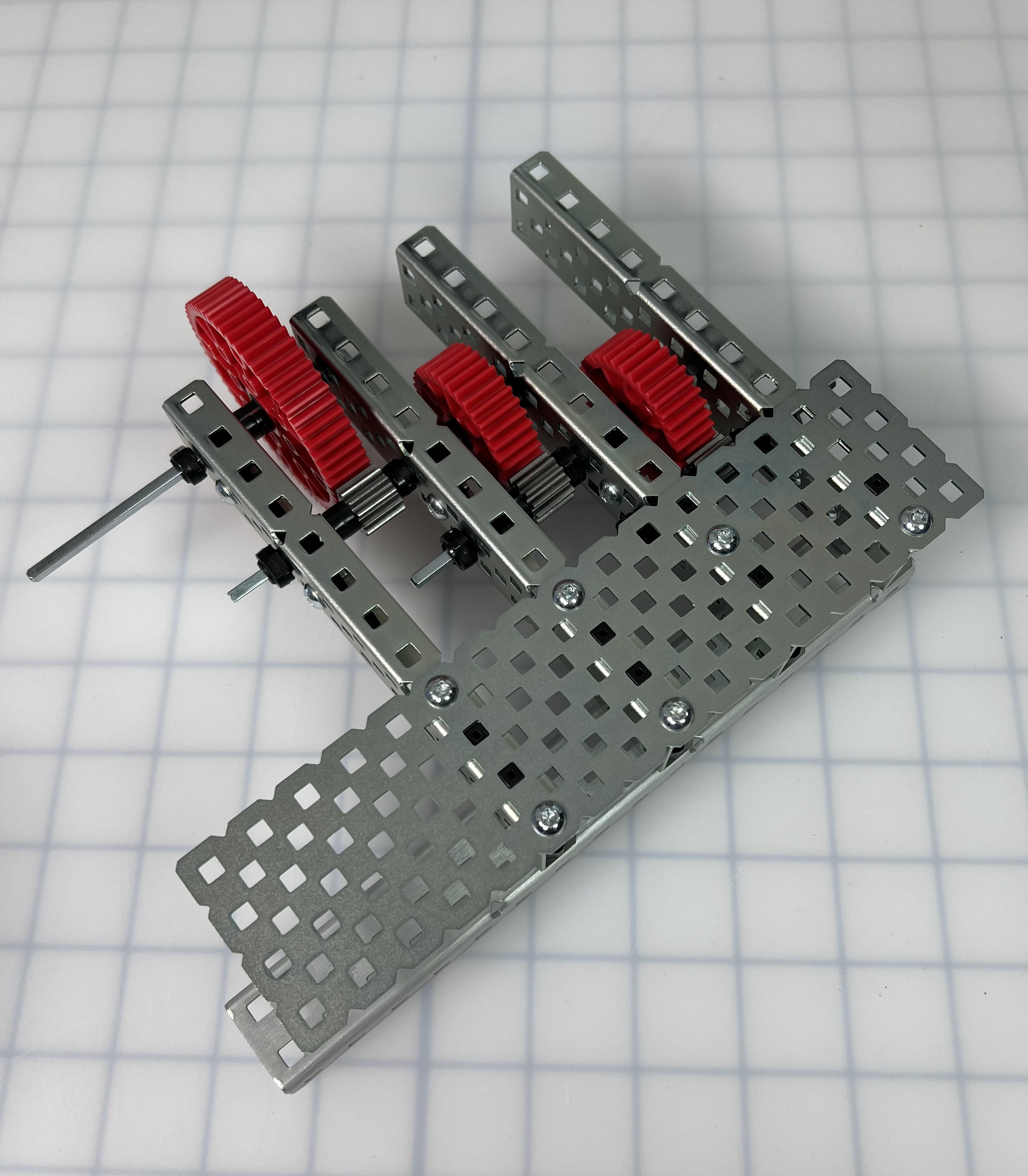
注: これは、EXP キットを使用してギアボックスを構築する方法の一例にすぎません。
|
-
シーク: 左側の EXP の例では、組み立て説明書で要求されている 3 つの 60 歯ギアではなく、2 つの 36 歯ギアと 1 つの 60 歯ギアを使用しています。
-
遊ぶ:
- [このビルドにギアを適用する] ページで、方程式に正しいギア サイズが使用されていることを確認します。 左側のサンプルでは、最初のギアは 60 歯と 12 歯が噛み合っていますが、他の 2 つは 36 歯と 12 歯が噛み合っています。
- これを使用すると、ギア比は 5:1、3:1、3:1 になります。 複合ギヤ比を45:1にする。
-
再考: 適応は必要ありません。
|
