
VRC 仮想スキル で使用されるロボットは、2022 年の VRC 仮想スキルで使用される VEX V5 ヒーロー ボットである Disco の仮想バージョンです。 -2023 VEX Robotics Competition (VRC) スピンアップ。 Virtual Disco は物理的な Disco と同じ寸法とモーターを備えていますが、VRC Virtual Skills での自律プログラミング用のセンサーが追加されています。 VRC Virtual Skills にはロボットが 1 台だけあり、すでに事前設定されています。 これにより、ロボット構成や所定のテンプレート プロジェクトが不要になります。
ロボット制御
ディスコには次のコントロールがあります。
ドライブトレイン。 これにより、VEXcode V5 のツールボックスの「ドライブトレイン」カテゴリのブロックがロボットを駆動および回転できるようになります。
インテーク モーター グループによって制御される インテーク 。 これにより、ロボットがディスクを収集してスコアを付けることができるようになります。
インテークモーターグループと[Spin for]ブロックを使用してインテークを回転させることができます。 モーター グループを「アウトテイク」方向に回転させるとディスクがフィールド タイルに向かって移動し、「インテーク」方向に回転させるとディスクを空中に発射してハイ ゴールで得点することができます。
吸気口の上部には 2 つの車輪が付いています。 これらはローラーを回転させるために使用できます。
ホイールがローラーに接触した状態でインテークモーター群を回転させると、ローラーが回転して色が変わります。
ロボットセンサー
Virtual Disco は、VRC Virtual Skills に自律プログラミング用のセンサーを追加しました。
慣性センサー
慣性センサー はドライブトレインとともに使用され、Disco がドライブトレインの進行方向を使用して正確かつ正確に旋回できるようにします。
ドライブトレインの機首方位は 0 ~ 359.9 度の値を報告し、時計回りが正になります。
慣性センサーの詳細については、 、VEX ライブラリのこの記事をご覧ください。
距離センサー
Virtual Disco の前面には、 距離センサー が 1 つあります。
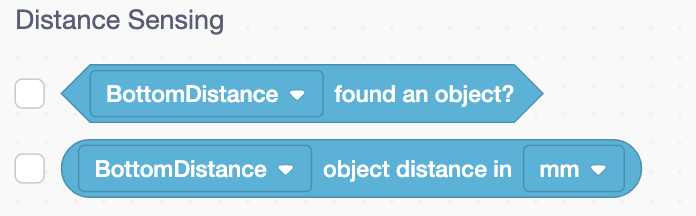
距離センサーは、物体がセンサーに近いかどうか、およびセンサーの前面から物体までのおおよその距離をミリメートルまたはインチ単位で報告します。
Disco の前面にある距離センサーを使用すると、ディスクが吸気口の前にあるかどうか、またはフィールド上のディスクがセンサーからどのくらい離れているかを判断できます。
V5 距離センサー の詳細については、VEX ライブラリの記事を参照してください。
ライントラッカー
3 つの ライン トラッカー は、Disco の吸気口の下側に沿って配置されています。 これらを使用して、吸気口内のディスクの位置を検出し、現在吸気口に保持されているディスクの数を判断できます。
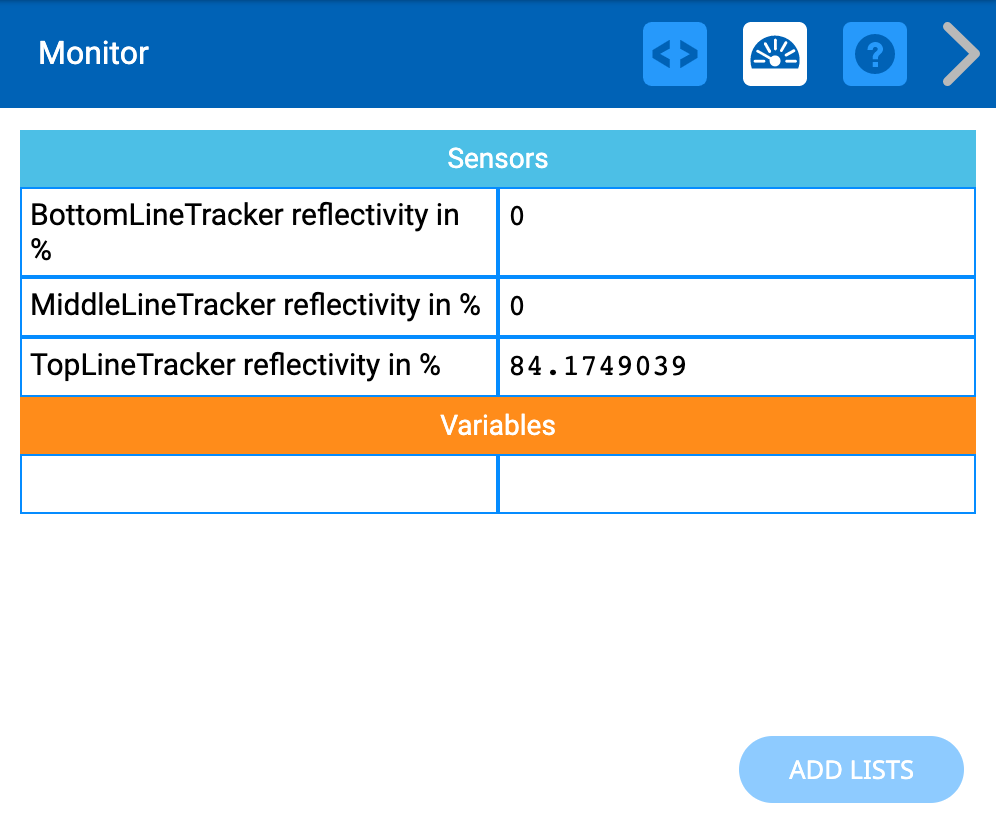
ライントラッカーは、赤外線 LED と赤外線センサーで構成される 3 線式センサーです。 表面の反射率を測定します。 ライン トラッカーをコーディングするときは、環境に応じて報告されるさまざまな反射率の値を理解することが重要です。 この例では、現在吸気口の上部にディスクがロードされているため、トップ ライン トラッカーはより高い反射率値を報告しています。
VEX V5 ライン トラッカーの詳細については、 この記事を参照してください。
VRC 仮想スキル プロジェクト (こちらの画像を参照) でのセンサー値の監視の詳細については、 この記事を参照してください。
光学センサー
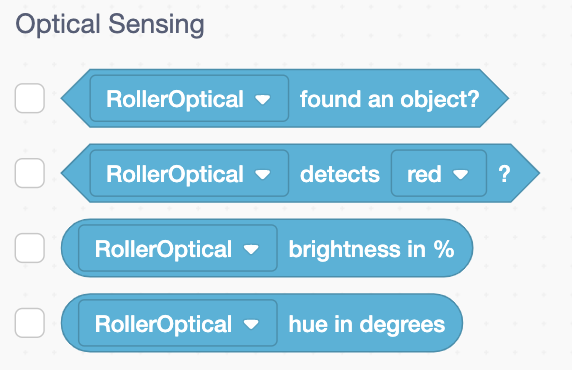
光学センサーr は、物体がセンサーに近いかどうか、また、近い場合はその物体の色を報告します。
光学センサーは、オブジェクトの明るさと色相の値を度単位で報告することもできます。
光学センサーは、ホイールの近くの Disco の上部にあります。 このセンサーはローラーの高さに配置されており、各ローラーの色を決定するために使用されます。
光学センサー の詳細については、VEX ライブラリの記事を参照してください。
ゲーム ポジショニング システム (GPS) センサー
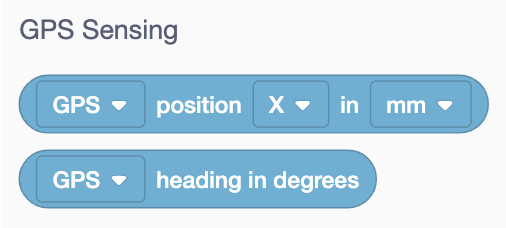
GPS センサー は、Disco の回転中心の現在の X および Y 位置をミリメートルまたはインチで報告できます。
GPS センサーは、現在の進行方向を度単位で報告することもできます。
GPS センサーはディスコの背面近くにあり、フィールドの内周に沿って GPS フィールド コード ストリップを読み取ることによって、フィールド上のロボットの位置と方向を決定するために使用されます。
GPS センサーを使用すると、デカルト座標系の知識を使用して特定の場所にドライブすることで、ディスコがフィールドをナビゲートできるようになります。
GPS センサーを使用すると、センサーの値がしきい値より大きくなるか小さくなるまで、Disco は X 軸または Y 軸に沿って走行できます。 これにより、Disco は設定された距離ではなくセンサーのフィードバックを使用して運転できるようになります。
GPS センサー を使用して VRC バーチャル スキルで位置の詳細を特定する方法の詳細については、この VEX ライブラリの記事を参照してください。