This article is not viewable in your language. Please check back at a future date.
この記事の翻訳は機械翻訳によって完了しました。多少の誤差はご容赦ください。
ステップ 1: 必要な部品を集め、EDR バッテリーを取り外します

- 次のアイテムが必要になります。
- (1) V5 ロボットバッテリー (図示せず)
- (1) V5 ロボットバッテリーケーブル (図示せず)
- (2) V5 バッテリー クリップ (図示なし)
- (4) #8-32 x 1/2 インチネジ
- (4) #8-32 ケップスナッツ
- (1) 11/32 インチレンチ
- (1) 3-32 インチ六角レンチ
- 構築された VEX EDR クローボット (図示せず)
- バッテリーを配線する場合は、ロボットに V5 Robot Brain を取り付ける必要もあります。
- 続行する前に、レンチと六角レンチを使用して VEX EDR バッテリー ストラップと 7.2V ロボット バッテリー NiMH をロボットから取り外します。
ステップ 2: V5 バッテリー クリップを取り付ける
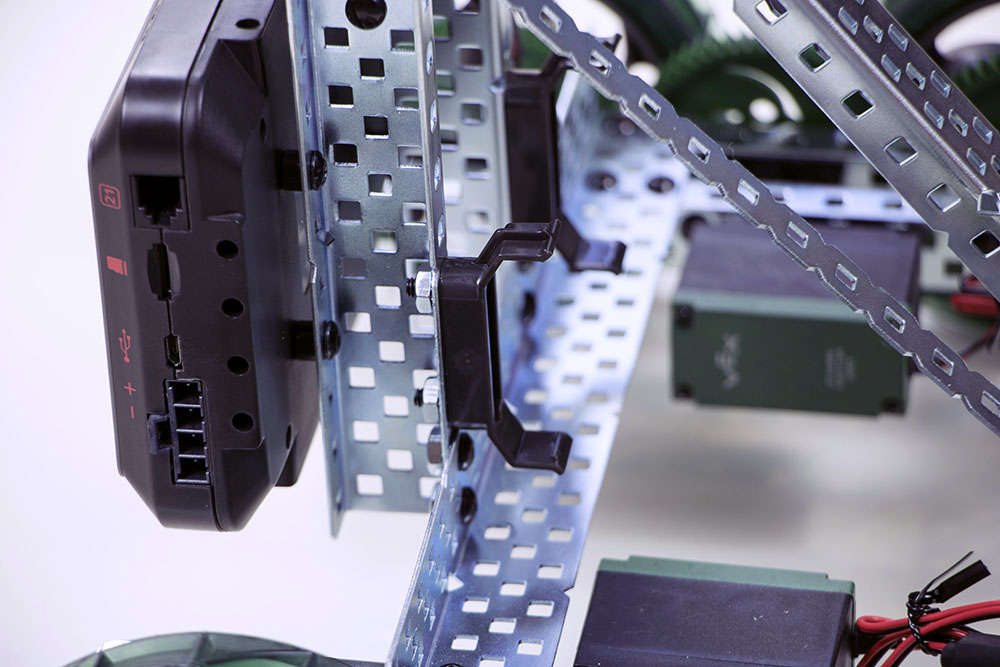
- Clawbot アームの内壁構造の底部に 2 つの V5 バッテリー クリップを取り付けます。
ステップ 3: V5 ロボットのバッテリーをクリップに固定します。
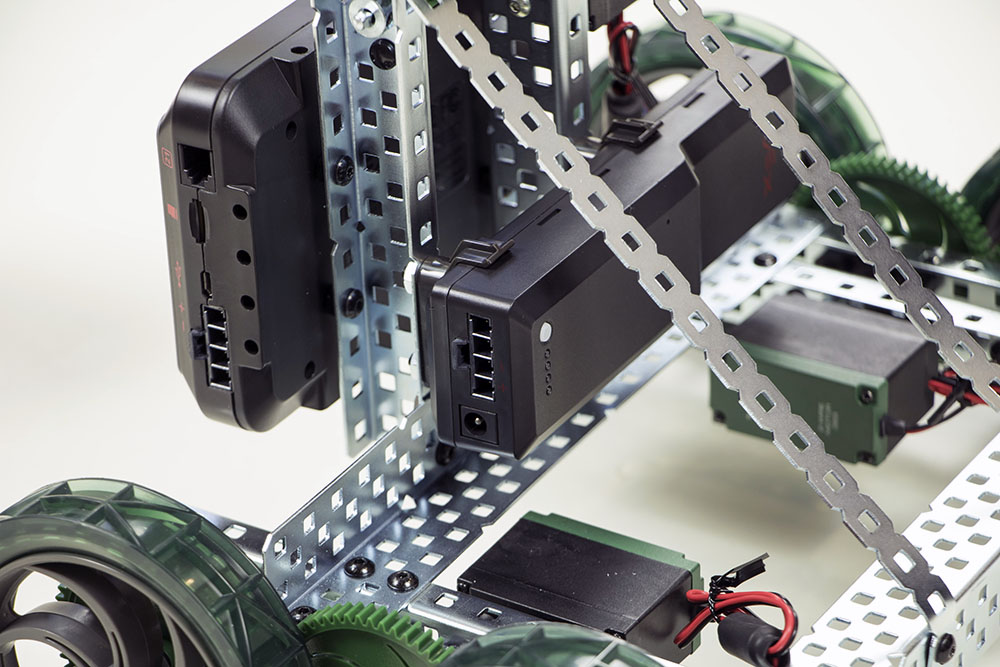
- カチッと音がして所定の位置に収まるまで、バッテリーをクリップに押し込みます。
ステップ 4: V5 ロボットのバッテリーを接続する
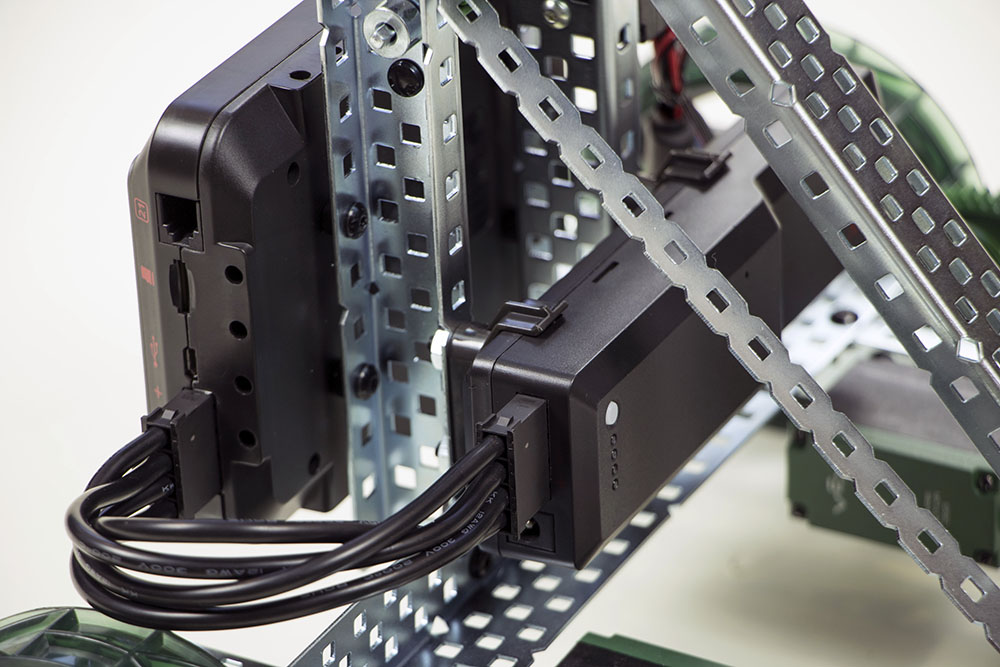
- バッテリー ケーブルを使用して、バッテリーを V5 Robot Brain に配線します。
- バッテリーの取り付けと配線に関する詳細な手順については、V5 Clawbot の組み立て手順参照してください。
