This article is not viewable in your language. Please check back at a future date.
La traduzione di questo articolo è stata completata tramite traduzione automatica. Si prega di perdonare eventuali errori.
I sensori forniscono la capacità di un robot di ricevere feedback dall'ambiente. Esistono numerosi sensori VEX IQ (1a generazione) che possono essere utilizzati per ottenere diversi tipi di input per il robot. La tabella seguente fornisce una panoramica di ciò che può fare ciascun sensore ed esempi di come può essere utilizzato in un progetto.
Tabella comparativa dei sensori VEX IQ (1a generazione).
| Sensore |
Funzione |
Esempi di utilizzo |
|
Interruttore paraurti
|
- Indica al robot se il suo paraurti è premuto (valore del sensore pari a 1) o rilasciato (valore del sensore pari a 0).
|
- Rilevare se il robot ha urtato un oggetto, come una parete di un labirinto o un oggetto di gioco
- Attivazione di un'azione del robot, quando premuto o rilasciato.
- Commutazione per accendere o spegnere i motori quando viene premuto.
- Rilevamento di altre parti del robot, come un braccio, quando preme sul paraurti.
|
|
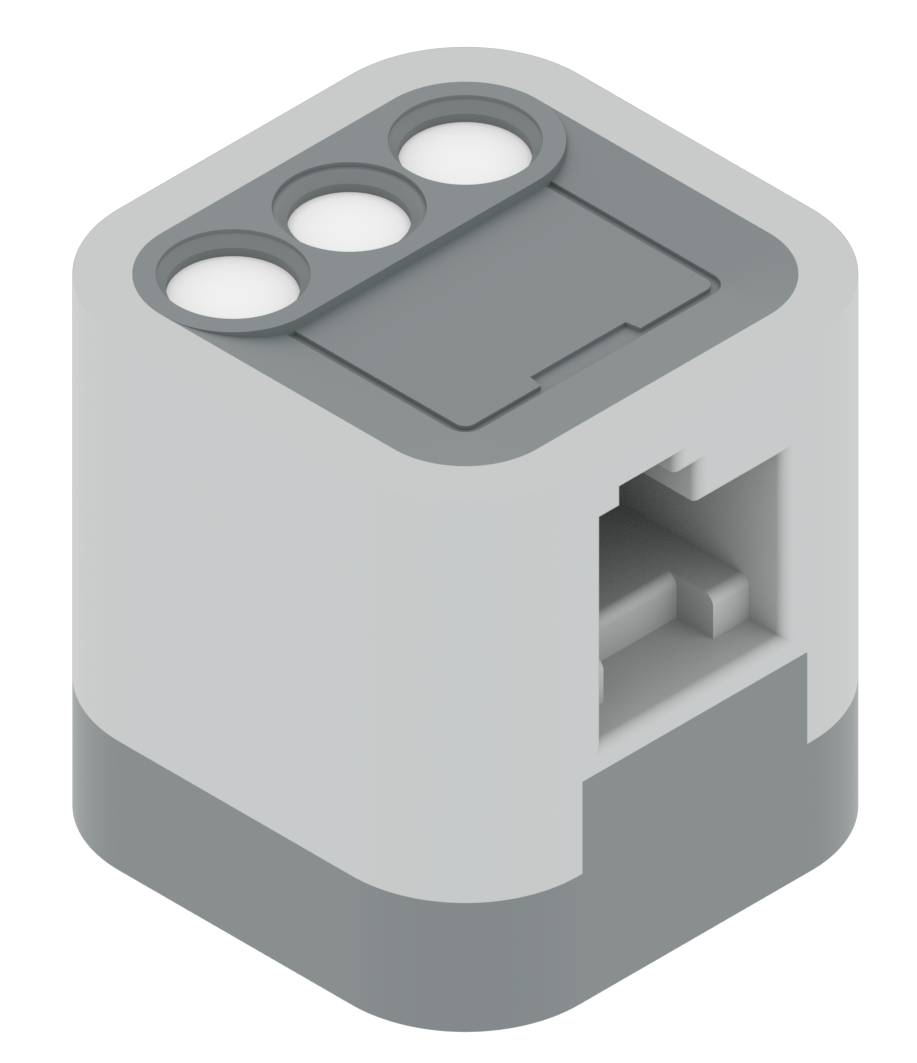
Toccare il LED

|
- Può rilevare il tocco capacitivo, come il tocco di un dito.
- Può essere impostato per visualizzare molti colori.
|
- Attivazione di un'azione del robot quando viene toccato
- Avviare o mettere in pausa un programma quando viene toccato
- Visualizzazione di colori diversi durante parti diverse di un programma, quindi è più semplice individuare il codice per la risoluzione dei problemi.
|
|
Sensore di colore
|
-
Utilizza la luce riflessa per rilevare un oggetto
- colore
- valore della tonalità
- valore della scala di grigi
- luminosità
- prossimità.
|
- Interagire con un oggetto di un determinato colore, ad esempio quando si ordinano gli oggetti per colore.
- Determinazione del valore numerico della tonalità di un oggetto colorato. Questi dati possono essere utili durante la risoluzione dei problemi del sensore di colore in varie condizioni di illuminazione.
- Comprendere come il sensore rileva il colore in varie condizioni di illuminazione.
- Rilevamento di una linea
- Rilevare se un oggetto è presente
|
|
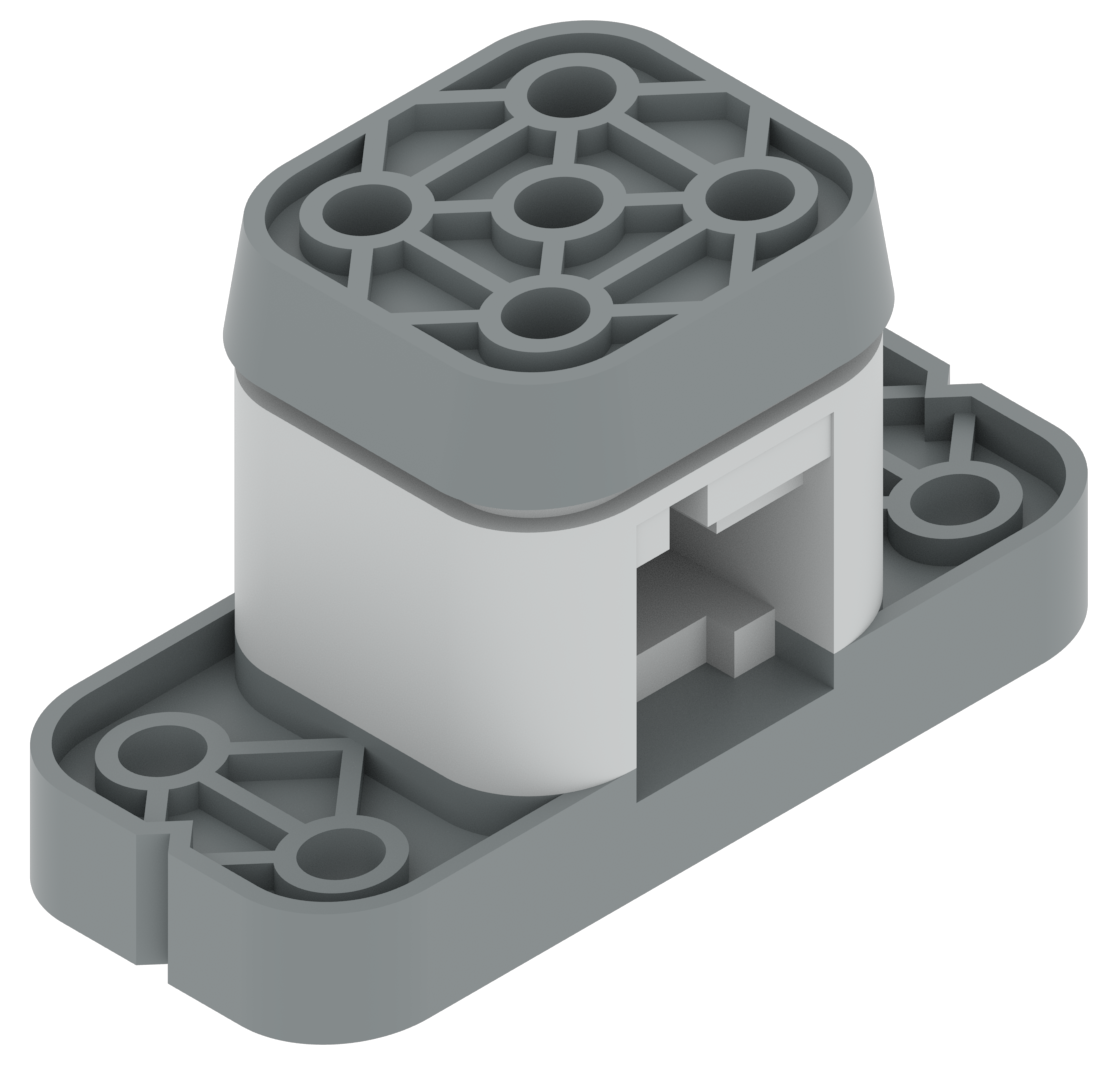
Sensore giroscopico
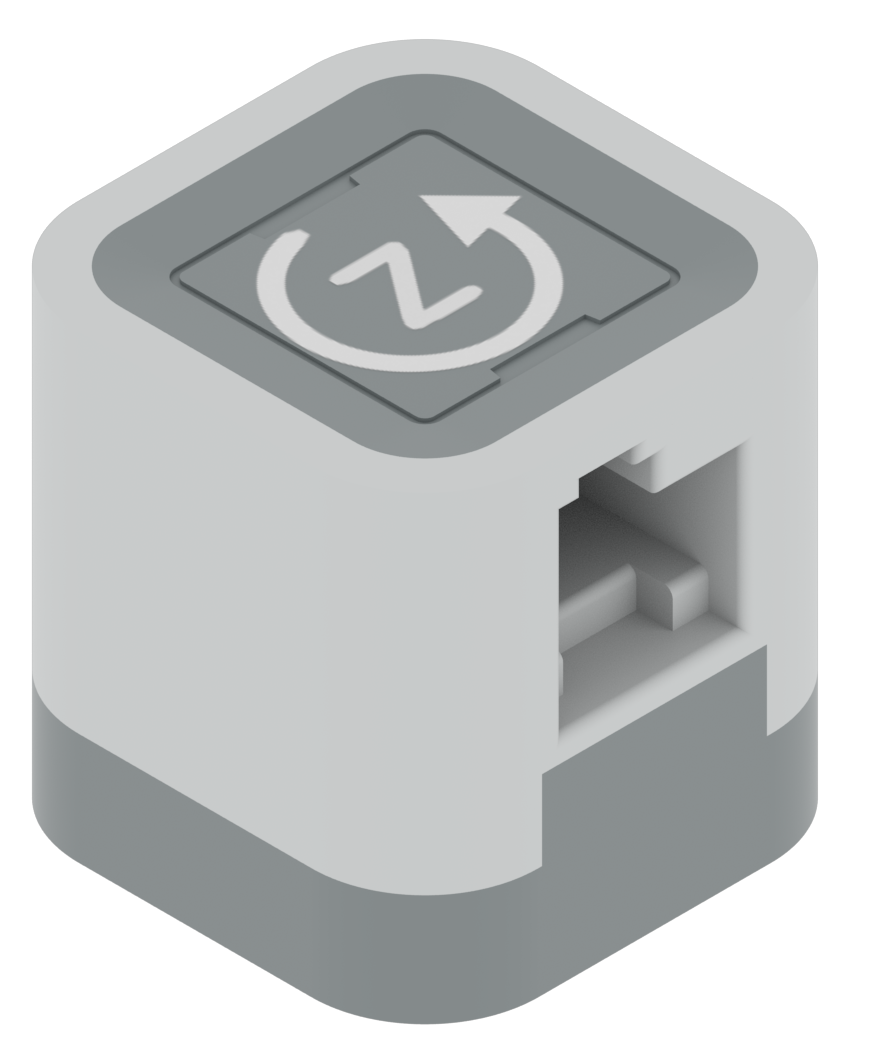
|
- Rileva la velocità e la rotazione del robot
|
- Mantenere la guida dritta
- Effettuare svolte precise
|
|
Sensore di distanza
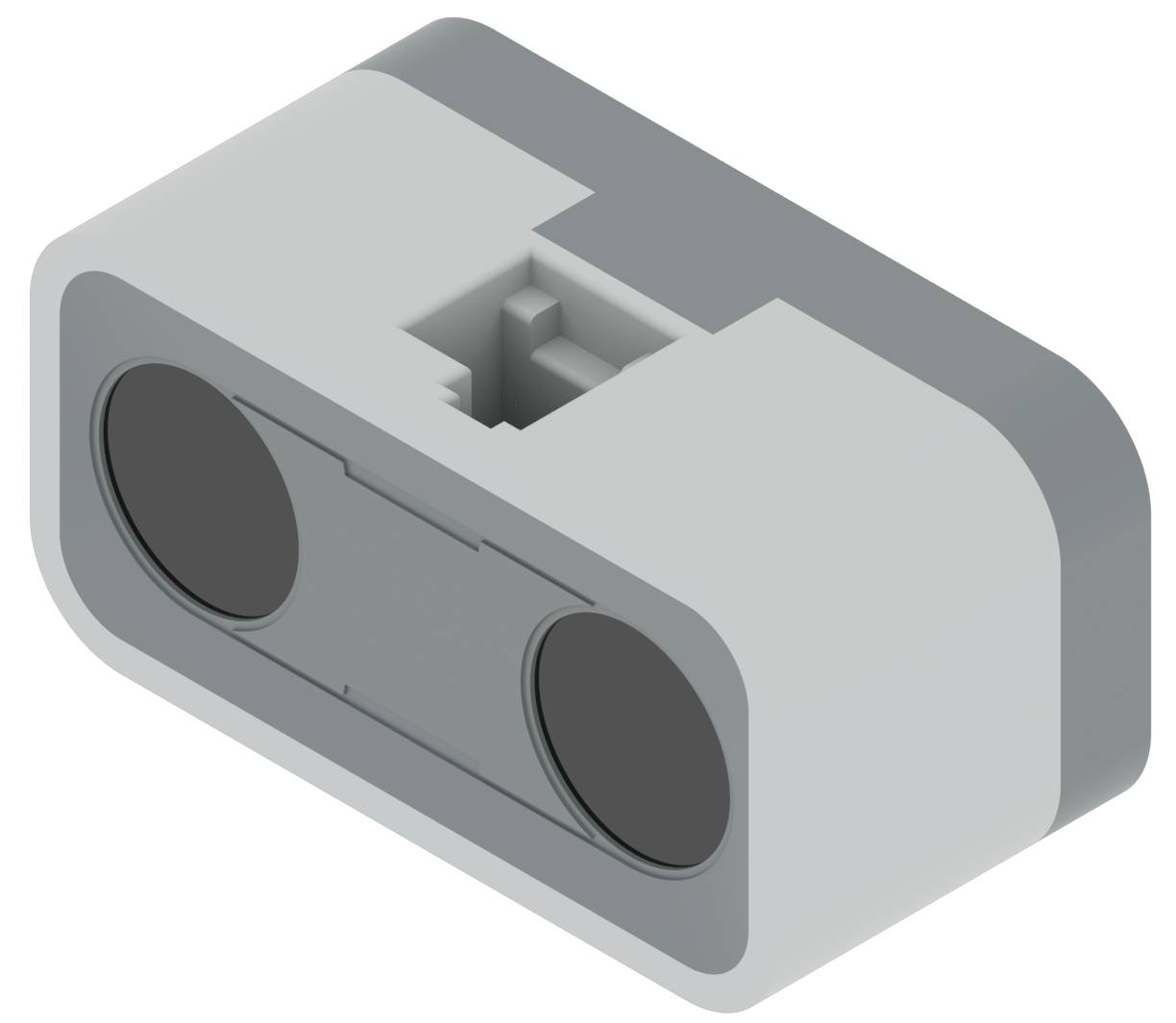
|
- Rileva se c'è un oggetto davanti a sé
- Misura la distanza tra sé e un oggetto
|
- Guidare a una certa distanza davanti a un oggetto, come un muro o un oggetto di gioco
- Avanzare finché non rileva che si trova a una certa distanza da un muro, quindi fermarsi.
- Guidare verso un oggetto per raccoglierlo.
- Allontanarsi da un oggetto o da una superficie finché non ha raggiunto una distanza specifica.
|
Ulteriori informazioni sul sensore
Per informazioni dettagliate sui sensori di cui sopra, vedere i seguenti articoli:
