This article is not viewable in your language. Please check back at a future date.
Terjemahan artikel ini diselesaikan dengan mesin penerjemah. Mohon maaf atas segala kemungkinan kesalahan.
Sensor menyediakan kemampuan bagi robot untuk menerima umpan balik dari lingkungan. Ada berbagai sensor VEX IQ (generasi ke-1) yang dapat digunakan untuk memperoleh berbagai jenis masukan untuk robot. Tabel di bawah ini memberikan ikhtisar tentang apa yang dapat dilakukan setiap sensor, dan contoh bagaimana sensor dapat digunakan dalam suatu proyek.
Tabel Perbandingan Sensor VEX IQ (generasi ke-1)
| Sensor |
Fungsi |
Contoh Penggunaan |
|
Sakelar Bumper
|
- Memberi tahu robot apakah bumpernya ditekan (nilai sensor 1) atau dilepaskan (nilai sensor 0).
|
- Mendeteksi apakah robot telah menabrak suatu objek, seperti dinding labirin atau objek permainan
- Memicu tindakan robot, saat ditekan atau dilepaskan.
- Beralih untuk menghidupkan atau mematikan motor saat ditekan.
- Mendeteksi bagian lain robot, seperti lengan, saat menekan bumper.
|
|
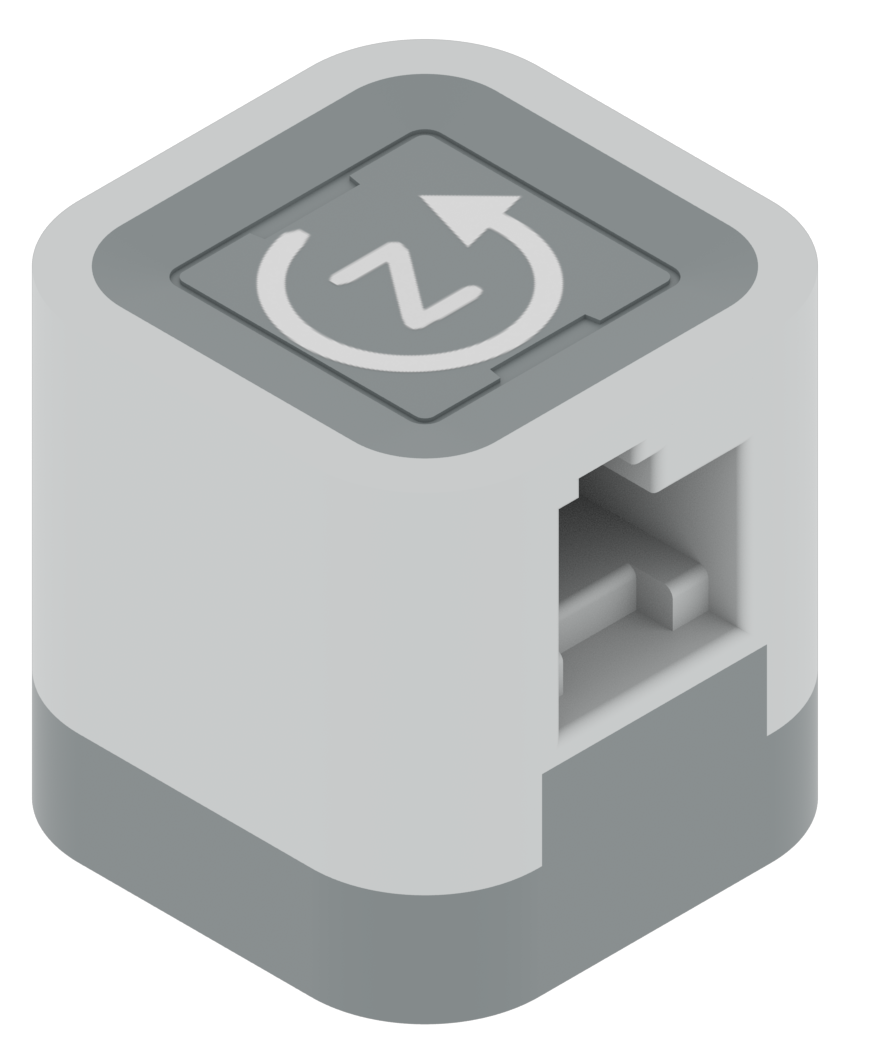
LED sentuh

|
- Dapat mendeteksi sentuhan kapasitif, seperti sentuhan jari.
- Dapat diatur untuk menampilkan banyak warna.
|
- Memicu tindakan robot saat disentuh
- Memulai atau menjeda program saat disentuh
- Menampilkan warna yang berbeda di bagian yang berbeda dalam suatu program, sehingga lebih mudah menentukan kode untuk pemecahan masalah.
|
|
Sensor Warna
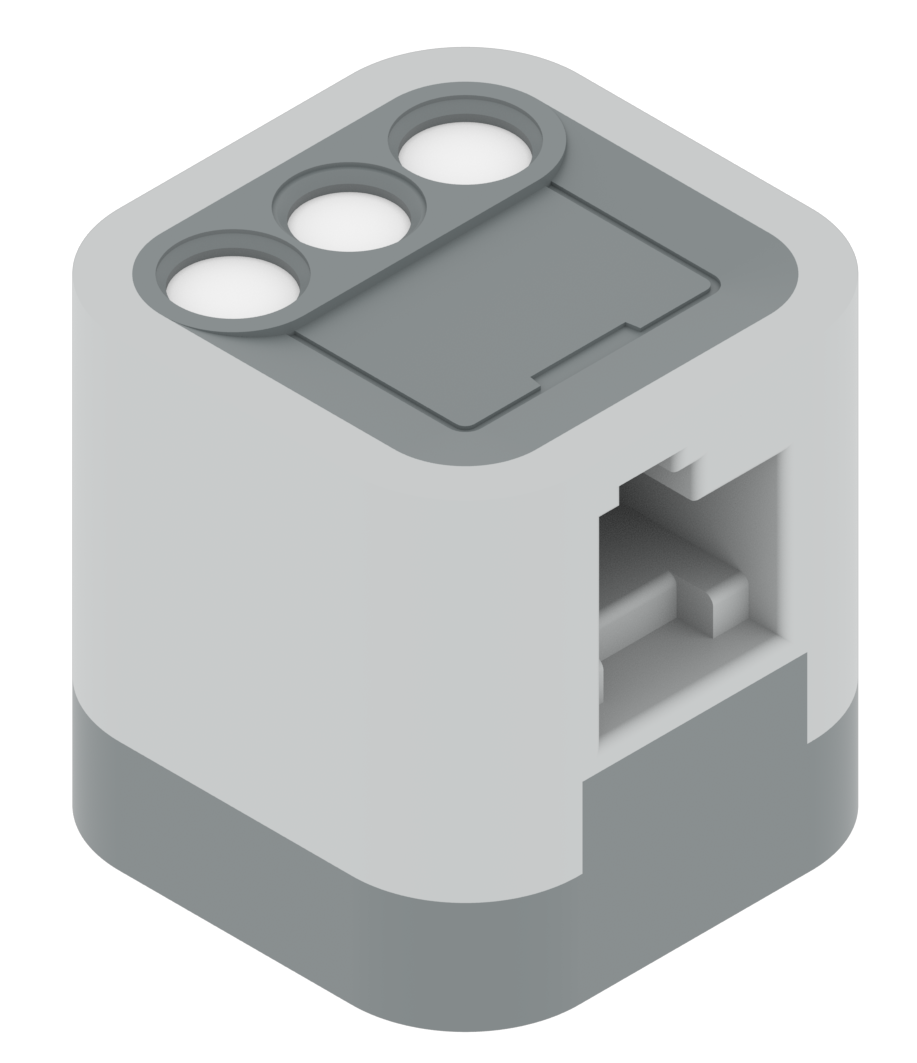
|
-
Menggunakan cahaya pantulan untuk mendeteksi objek
- warna
- nilai rona
- nilai skala abu-abu
- kecerahan
- kedekatan.
|
- Berinteraksi dengan item dengan warna tertentu, seperti saat menyortir objek berdasarkan warna.
- Menentukan nilai rona numerik suatu objek berwarna. Data ini dapat berguna saat memecahkan masalah sensor warna dalam berbagai kondisi pencahayaan.
- Memahami bagaimana Sensor mendeteksi warna dalam berbagai kondisi pencahayaan.
- Mendeteksi garis
- Mendeteksi apakah suatu objek ada
|
|
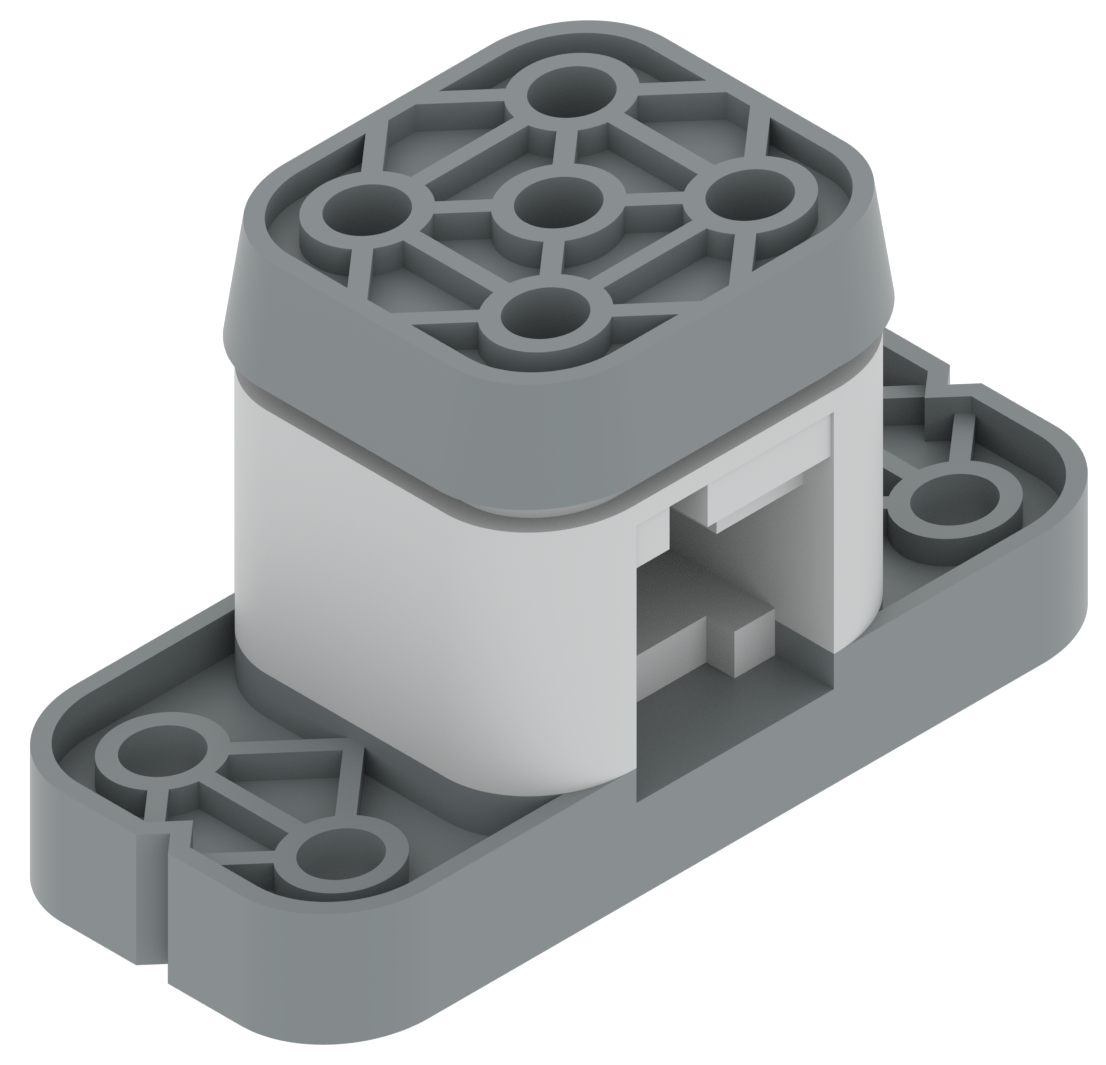
Sensor Giroskop
|
- Mendeteksi kecepatan dan rotasi robot
|
- Mempertahankan mengemudi lurus
- Membuat belokan yang akurat
|
|
Sensor Jarak
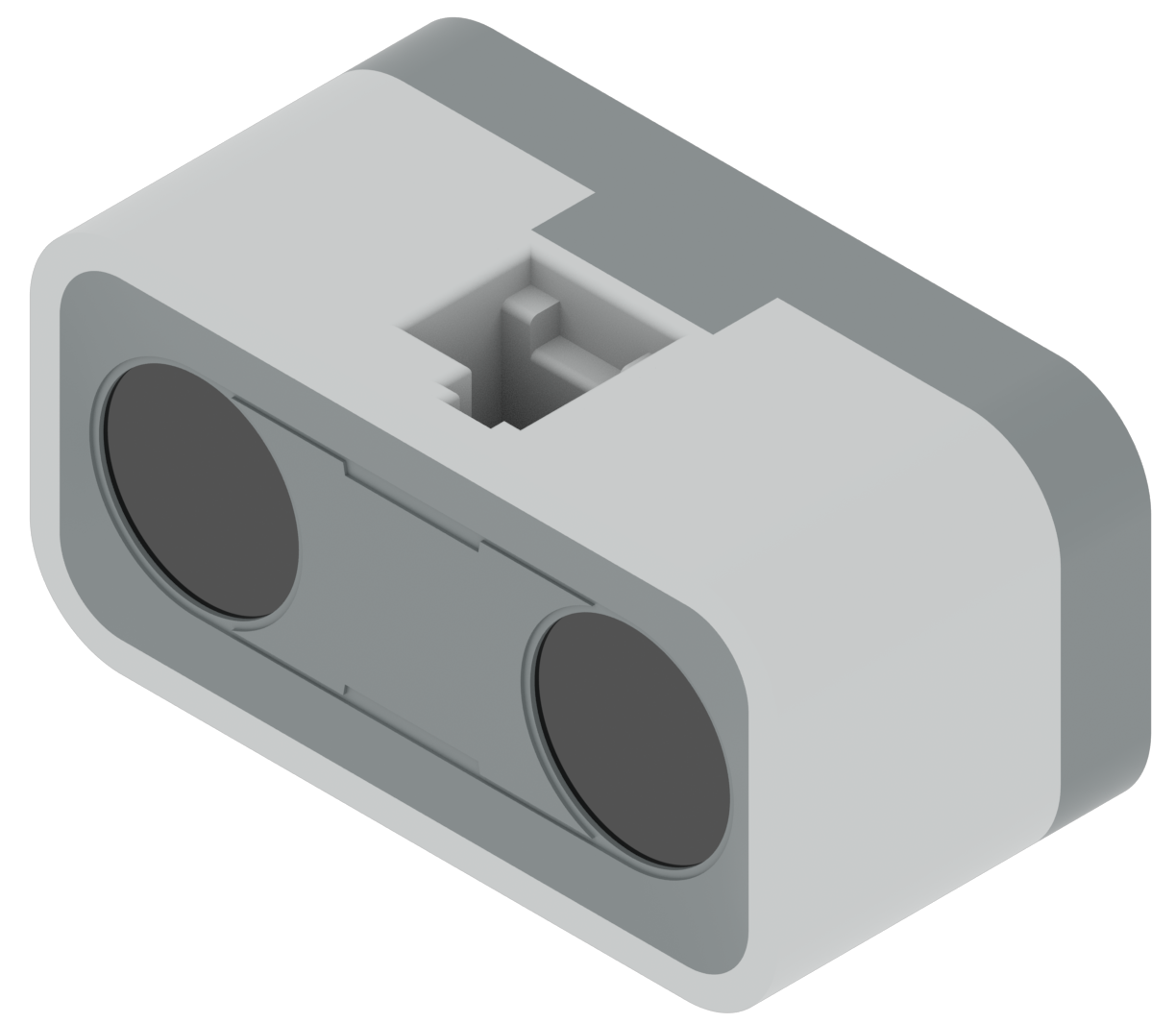
|
- Mendeteksi jika ada objek di depannya
- Mengukur jarak antara dirinya dan suatu objek
|
- Mengemudi pada jarak tertentu di depan suatu objek, seperti dinding atau objek permainan
- Melaju maju hingga mendeteksi jarak tertentu dari tembok, lalu berhenti.
- Mengemudi ke suatu objek untuk mengambilnya.
- Menjauhi suatu objek atau permukaan hingga mencapai jarak tertentu.
|
Informasi Sensor Tambahan
Untuk informasi lebih rinci tentang sensor di atas, lihat artikel berikut:
