This article is not viewable in your language. Please check back at a future date.
Ennek a cikknek a fordítása gépi fordítással készült. Az esetleges hibákért elnézést kérünk.
Az érzékelők lehetővé teszik a robot számára, hogy visszajelzést kapjon a környezettől. Számos VEX IQ (1. generációs) érzékelő létezik, amelyek segítségével különböző típusú bemeneteket kaphat a robot. Az alábbi táblázat áttekintést nyújt arról, hogy az egyes érzékelők mire képesek, és példákat ad arra, hogyan használhatók fel egy projektben.
VEX IQ (1. gen) érzékelők összehasonlító táblázata
| Érzékelő |
Funkció |
Felhasználási példa |
|
Lökhárító kapcsoló
|
- Megmondja a robotnak, hogy a lökhárítója le van-e nyomva (az érzékelő értéke 1) vagy elengedve (az érzékelő értéke 0).
|
- Annak észlelése, hogy a robot nekiütközött-e egy tárgynak, például labirintusfalnak vagy játéktárgynak
- Robotművelet kiváltása lenyomásakor vagy elengedésekor.
- A motorok be- és kikapcsolása, amikor megnyomják.
- A robot egyéb alkatrészeinek, például egy karjának észlelése, amikor benyomja a lökhárítót.
|
|
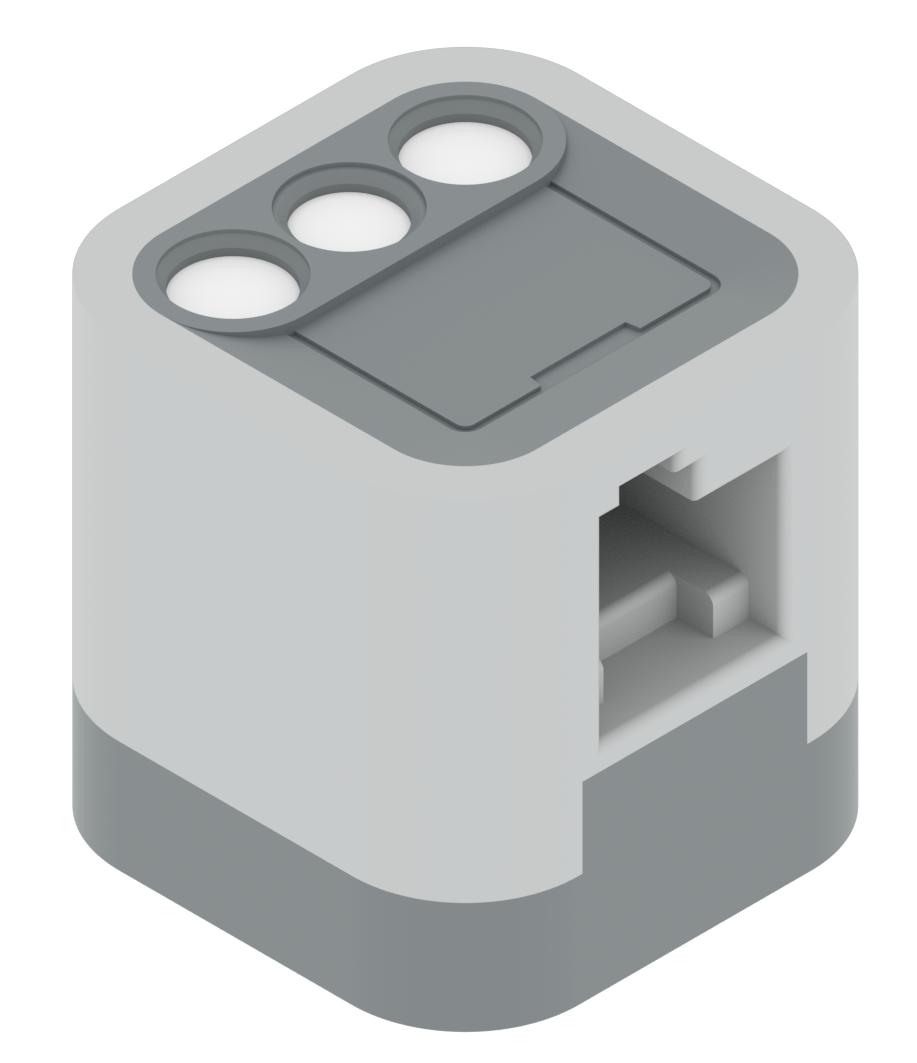
Érintse meg a LED-et

|
- Érzékelheti a kapacitív érintést, például egy ujj érintését.
- Több szín megjelenítésére is beállítható.
|
- Robotművelet kiváltása érintésre
- Program indítása vagy szüneteltetése érintésre
- Különböző színek megjelenítése a program különböző részei során, így könnyebben meghatározható a kód a hibaelhárításhoz.
|
|
Színérzékelő
|
-
Visszavert fényt használ egy tárgy észlelésére
- szín
- színárnyalat értéke
- szürkeárnyalatos érték
- Fényerősség
- közelség.
|
- Egy bizonyos színű elemmel való interakció, például az objektumok szín szerinti rendezése.
- Színes objektum numerikus színárnyalat értékének meghatározása. Ezek az adatok hasznosak lehetnek a színérzékelő hibáinak elhárítása során különböző fényviszonyok között.
- Annak megértése, hogy az érzékelő hogyan érzékeli a színeket különböző fényviszonyok között.
- Vonal észlelése
- Az objektum jelenlétének észlelése
|
|
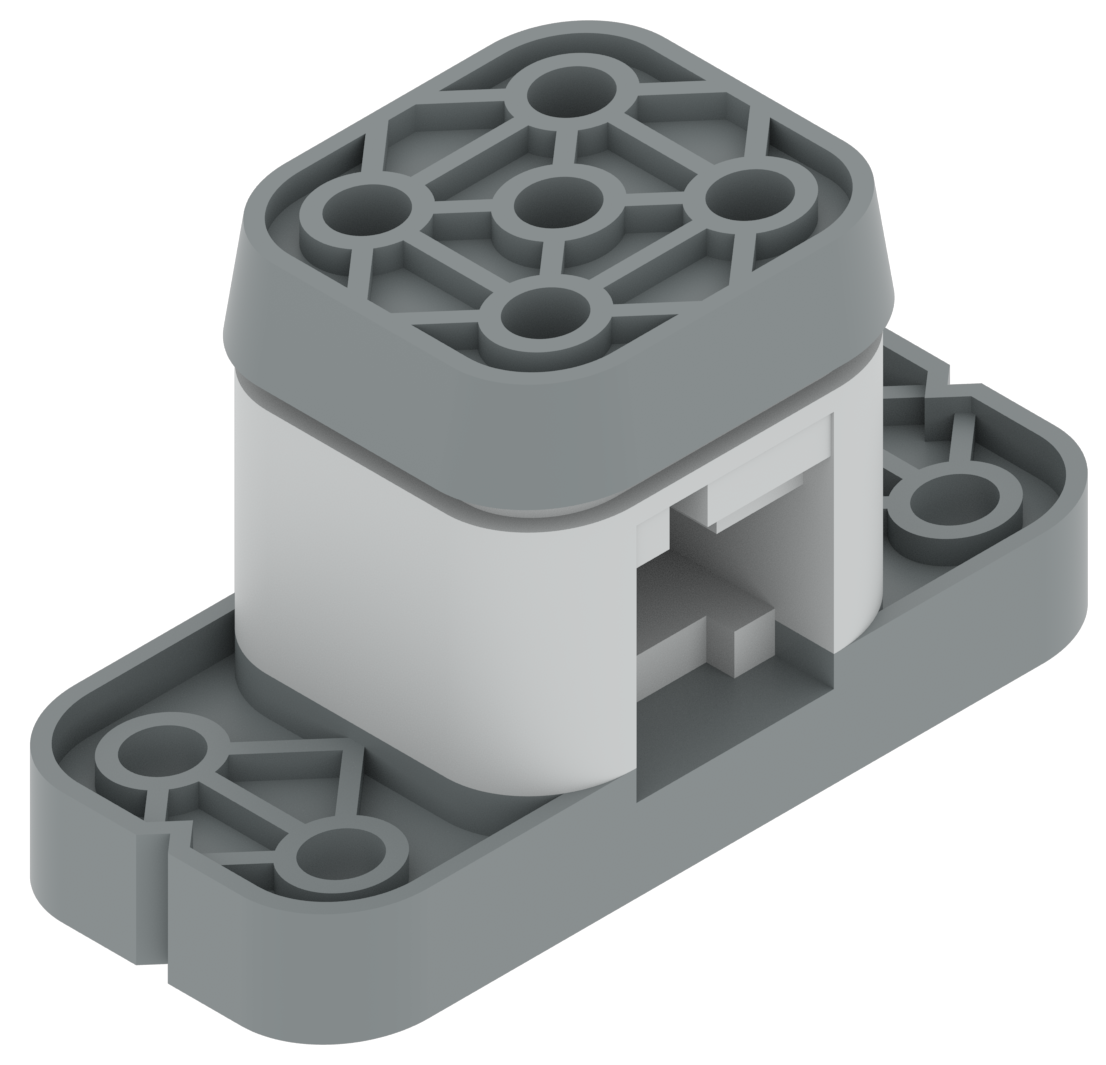
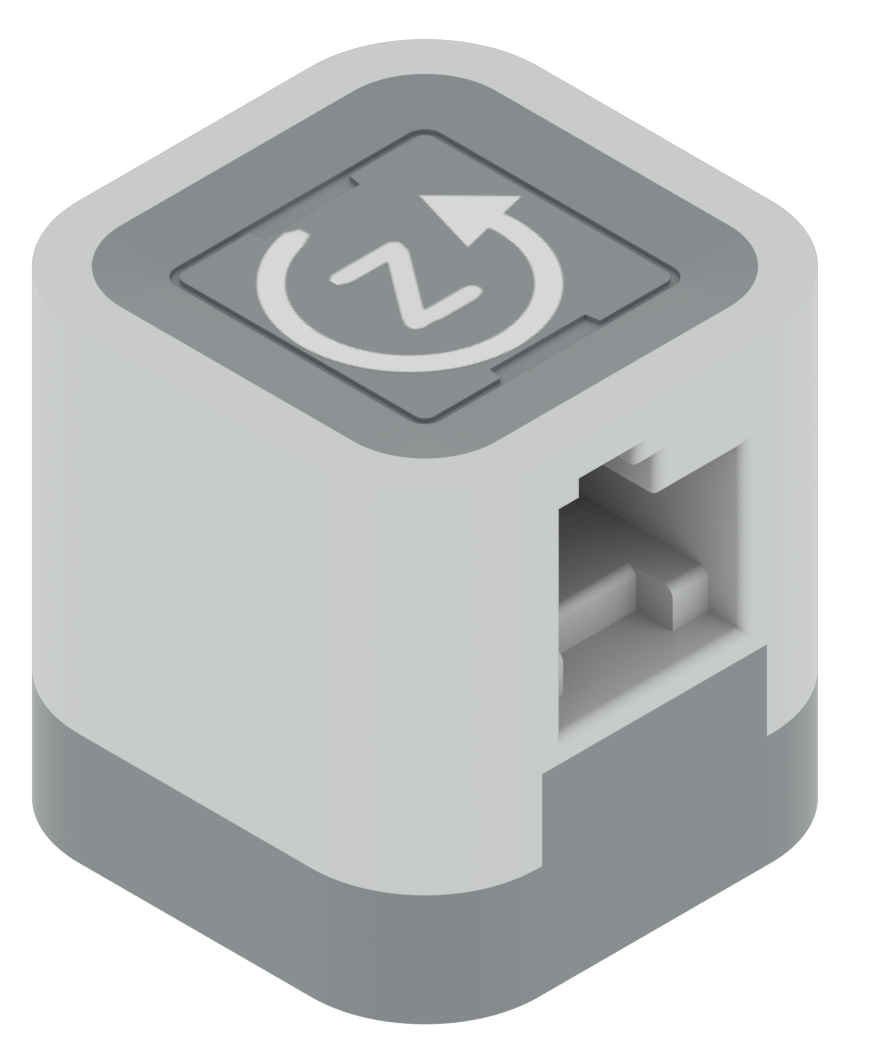
Giroszkóp érzékelő
|
- Érzékeli a robot sebességét és forgását
|
- Az egyenes vezetés fenntartása
- Pontos fordulatok készítése
|
|
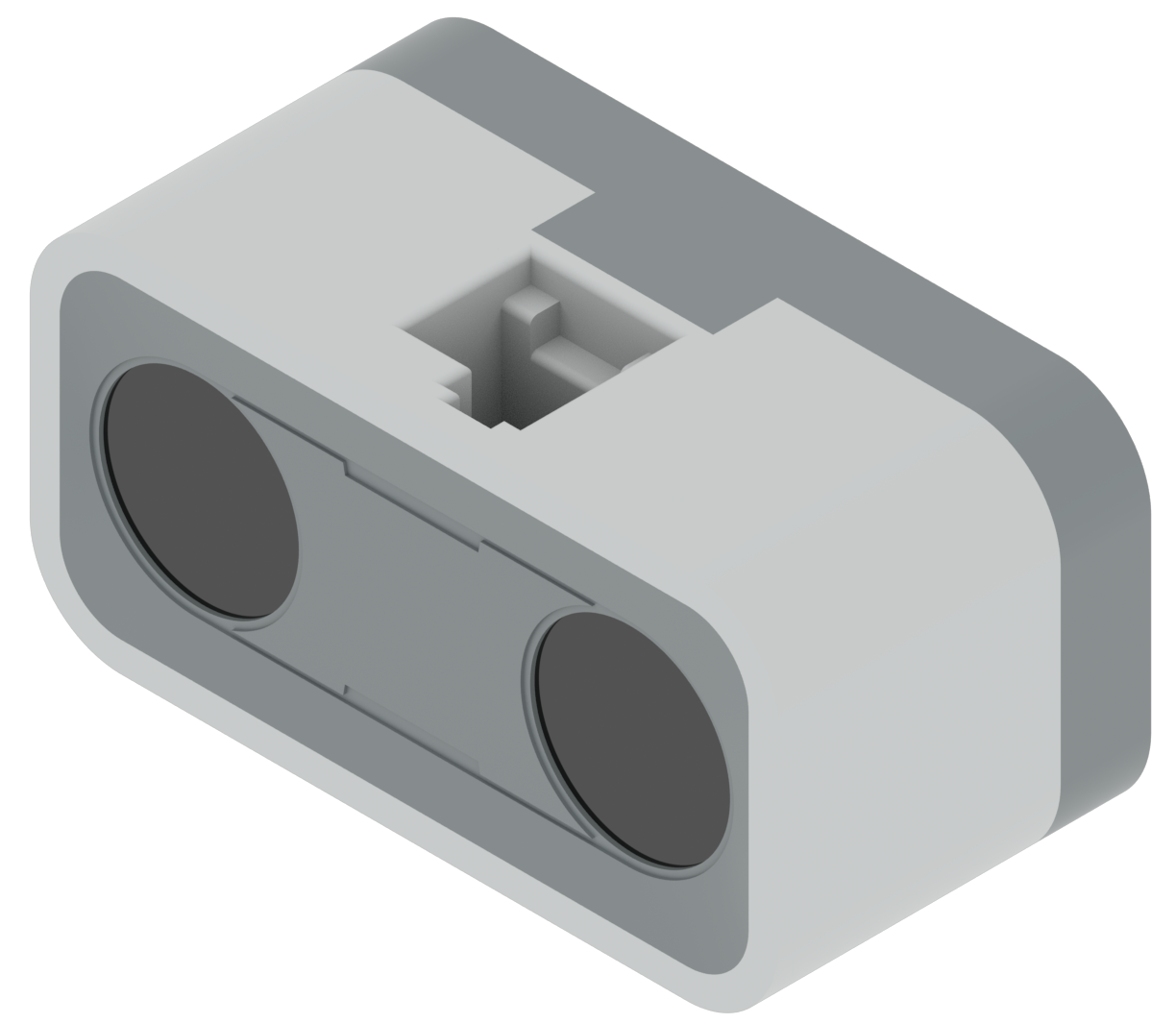
Távolság érzékelő
|
- Érzékeli, hogy van-e előtte tárgy
- Méri a távolságot önmaga és egy tárgy között
|
- Egy bizonyos távolságra való vezetés egy tárgy, például fal vagy játéktárgy előtt
- Haladjon előre, amíg azt észleli, hogy bizonyos távolságra van a faltól, majd megáll.
- Autózás egy tárgyhoz, hogy felvegye.
- Eltávolodás egy tárgytól vagy felülettől, amíg az el nem ér egy meghatározott távolságot.
|
További érzékelő információk
A fenti érzékelőkkel kapcsolatos részletes információkért lásd a következő cikkeket:
