This article is not viewable in your language. Please check back at a future date.
La traduction de cet article a été réalisée par traduction automatique. Veuillez pardonner toute erreur éventuelle.
Les capteurs permettent à un robot de recevoir des commentaires de l'environnement. Il existe une variété de capteurs VEX IQ (1ère génération) qui peuvent être utilisés pour obtenir différents types d'entrées pour le robot. Le tableau ci-dessous donne un aperçu de ce que chaque capteur peut faire et des exemples de la façon dont il peut être utilisé dans un projet.
Tableau de comparaison des capteurs VEX IQ (1ère génération)
| Capteur |
Fonction |
Exemples d'utilisation |
|
Interrupteur de pare-chocs
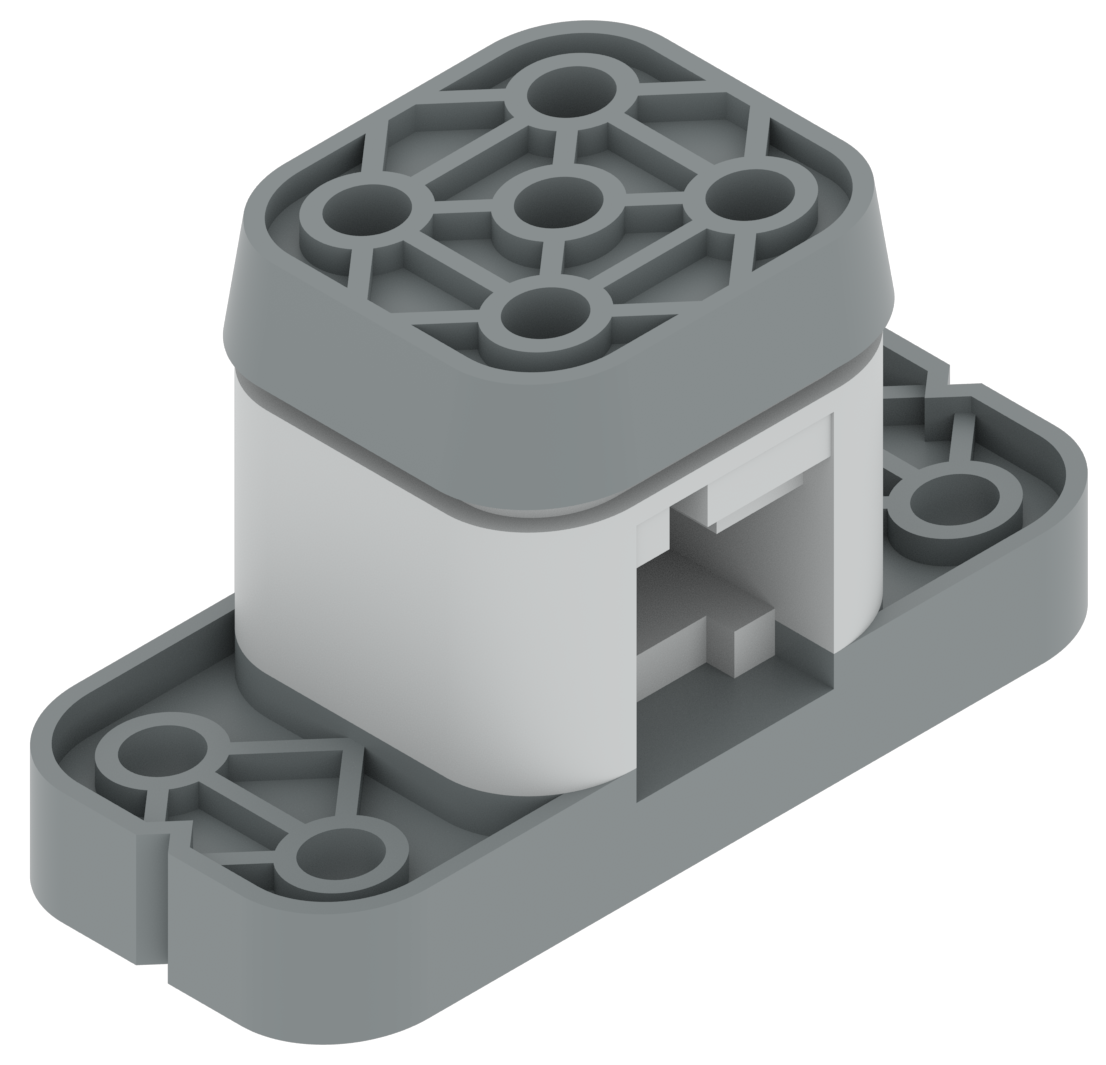
|
- Indique au robot si son pare-chocs est enfoncé (valeur du capteur de 1) ou relâché (valeur du capteur de 0).
|
- Détecter si le robot a heurté un objet, tel qu'un mur de labyrinthe ou un objet de jeu
- Déclencher une action du robot, lorsqu'il est enfoncé ou relâché.
- Basculer pour allumer ou éteindre les moteurs lorsque vous appuyez dessus.
- Détecter d'autres parties du robot, comme un bras, lorsqu'il appuie sur le pare-chocs.
|
|
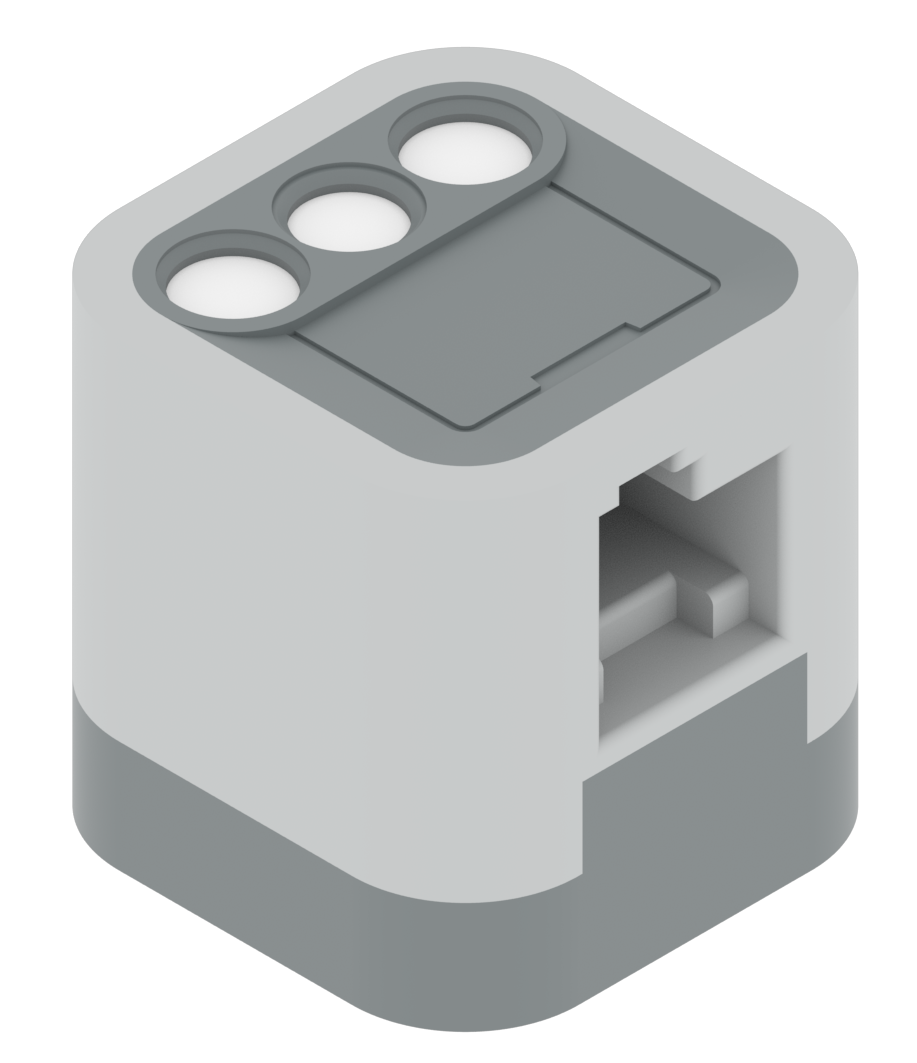
LED tactile

|
- Peut détecter le toucher capacitif, tel que le contact d'un doigt.
- Peut être configuré pour afficher de nombreuses couleurs.
|
- Déclencher une action du robot lorsqu'on le touche
- Démarrer ou mettre en pause un programme lorsque vous le touchez
- Affichage de différentes couleurs au cours de différentes parties d'un programme, il est donc plus facile d'identifier le code pour le dépannage.
|
|
Capteur de couleur
|
-
Utilise la lumière réfléchie pour détecter un objet
- couleur
- valeur de teinte
- valeur en niveaux de gris
- luminosité
- proximité.
|
- Interagir avec un élément d'une certaine couleur, par exemple lors du tri d'objets par couleur.
- Détermination de la valeur numérique de teinte d'un objet coloré. Ces données peuvent être utiles lors du dépannage du capteur de couleur dans des conditions d'éclairage variées.
- Comprendre comment le capteur détecte les couleurs dans diverses conditions d'éclairage.
- Détection d'une ligne
- Détecter si un objet est présent
|
|
Capteur gyroscopique
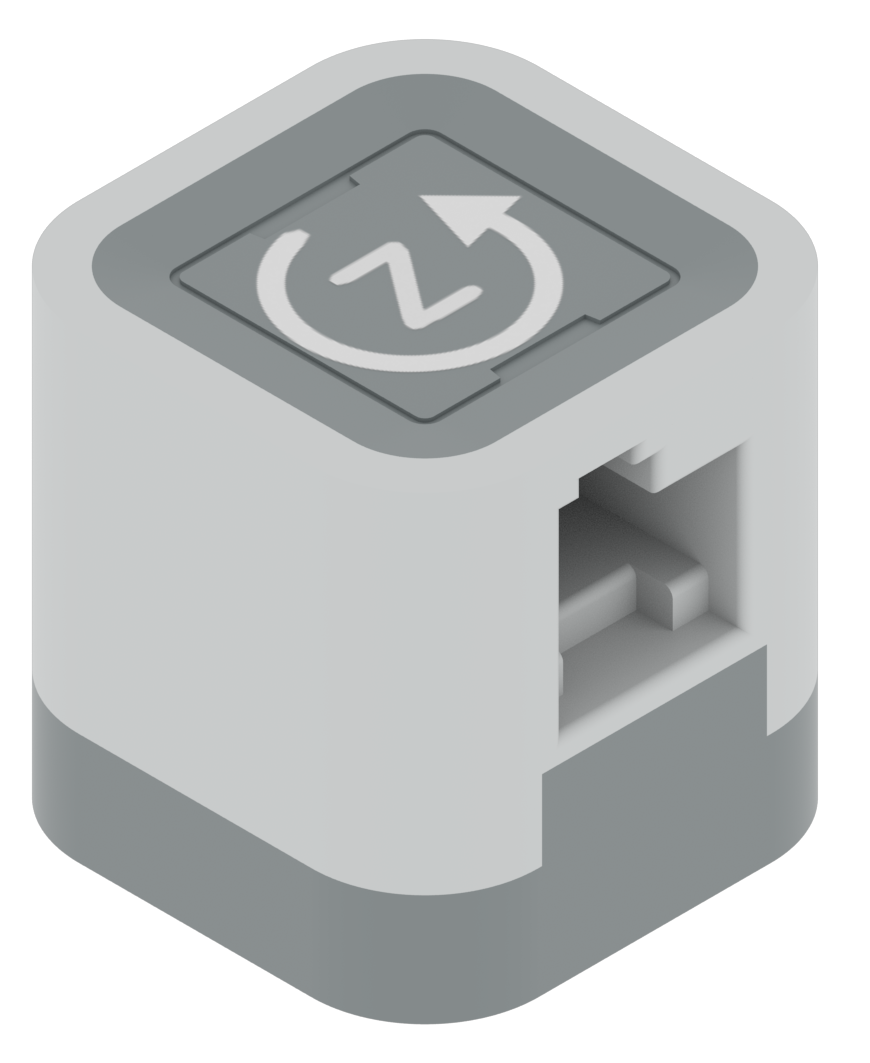
|
- Détecte la vitesse et la rotation du robot
|
- Maintenir une conduite droite
- Effectuer des virages précis
|
|
Capteur de distance
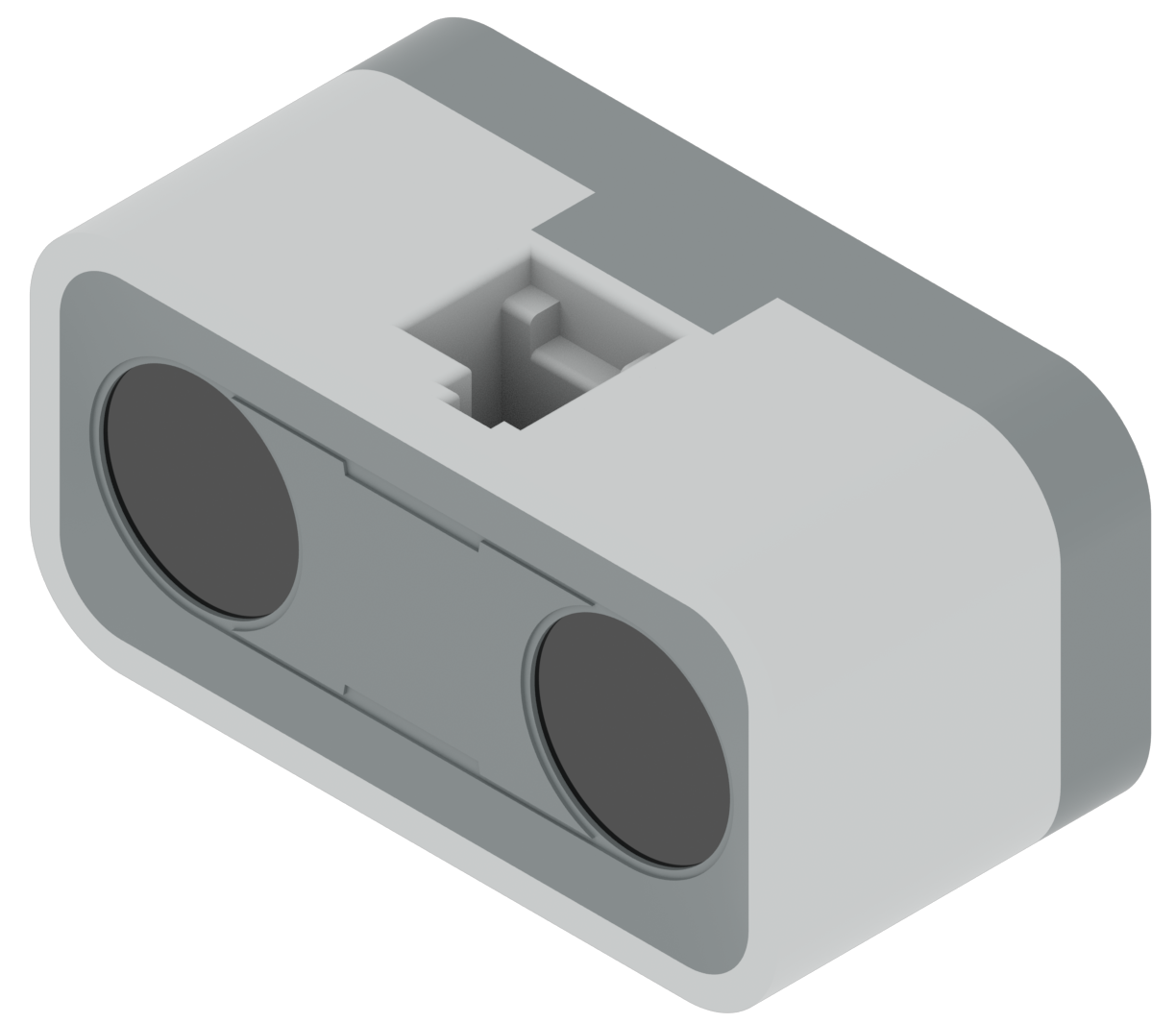
|
- Détecte s'il y a un objet devant lui
- Mesure la distance entre lui et un objet
|
- Conduire à une certaine distance devant un objet, comme un mur ou un objet de jeu
- Avancer jusqu'à ce qu'il détecte qu'il se trouve à une certaine distance d'un mur, puis s'arrêter.
- Se diriger vers un objet pour le récupérer.
- S'éloigner d'un objet ou d'une surface jusqu'à ce qu'il ait atteint une distance spécifique.
|
Informations supplémentaires sur le capteur
Pour des informations détaillées sur les capteurs ci-dessus, consultez les articles suivants :
