This article is not viewable in your language. Please check back at a future date.
Tämän artikkelin käännös valmistettiin konekäännöksellä. Pyydän anteeksi mahdolliset virheet.
Anturit antavat robotille mahdollisuuden vastaanottaa palautetta ympäristöstä. On olemassa useita VEX IQ (1st gen) antureita, joita voidaan käyttää erityyppisten tulojen saamiseksi robotille. Alla oleva taulukko antaa yleiskatsauksen siitä, mitä kukin anturi voi tehdä, ja esimerkkejä siitä, kuinka sitä voidaan käyttää projektissa.
VEX IQ (1. sukupolvi) sensorien vertailutaulukko
| Anturi |
Toiminto |
Käyttöesimerkkejä |
|
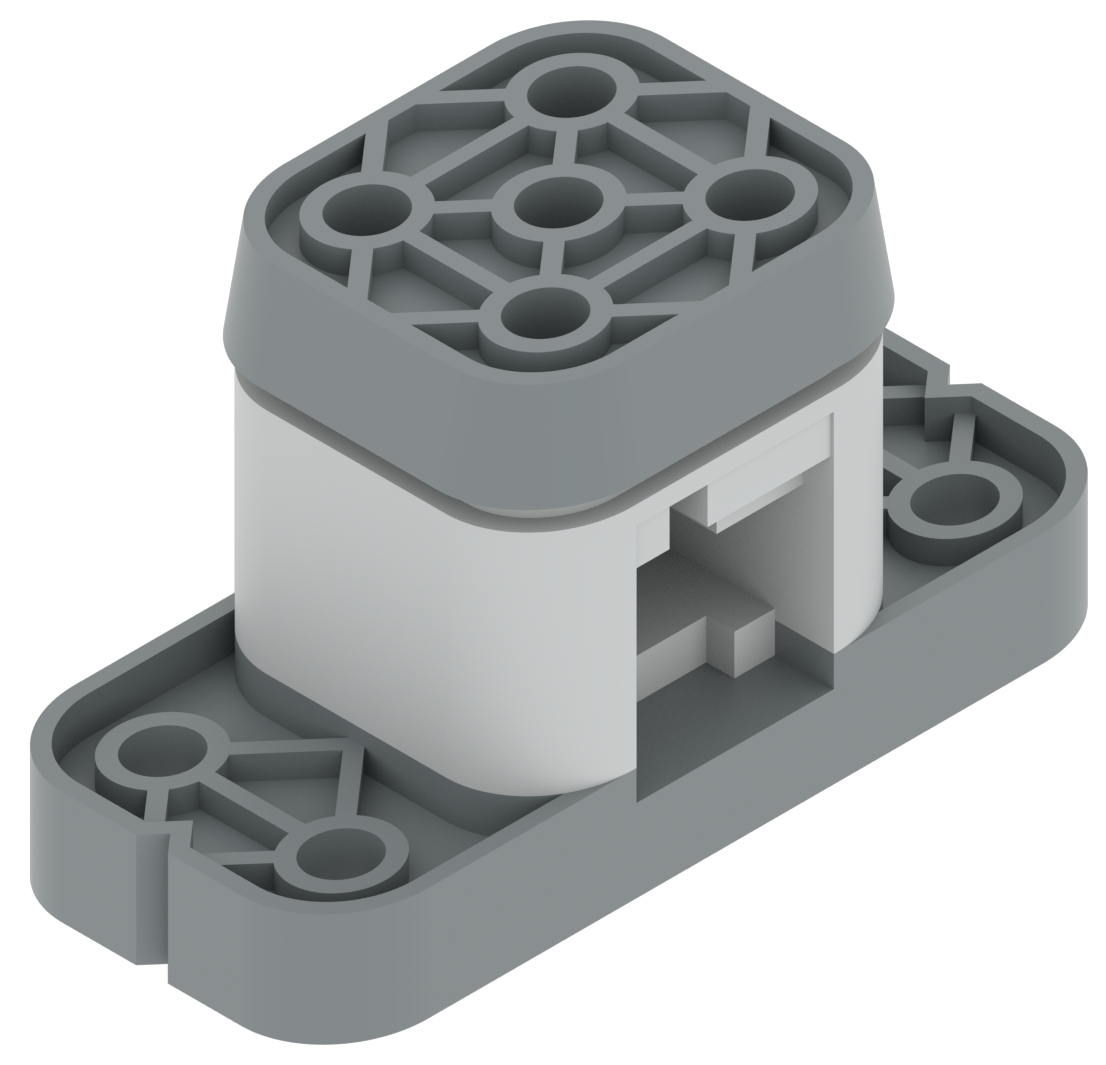
Puskurin kytkin
|
- Kertoo robotille, painetaanko sen puskuria (anturin arvo 1) vai vapautetaanko (anturin arvo 0).
|
- Havaitsee, onko robotti törmännyt esineeseen, kuten labyrinttiseinään tai peliobjektiin
- Robottitoiminnon käynnistäminen, kun sitä painetaan tai vapautetaan.
- Vaihtaa moottorit päälle tai pois päältä painettaessa.
- Robotin muiden osien, kuten käsivarren, havaitseminen, kun se painaa puskuria.
|
|
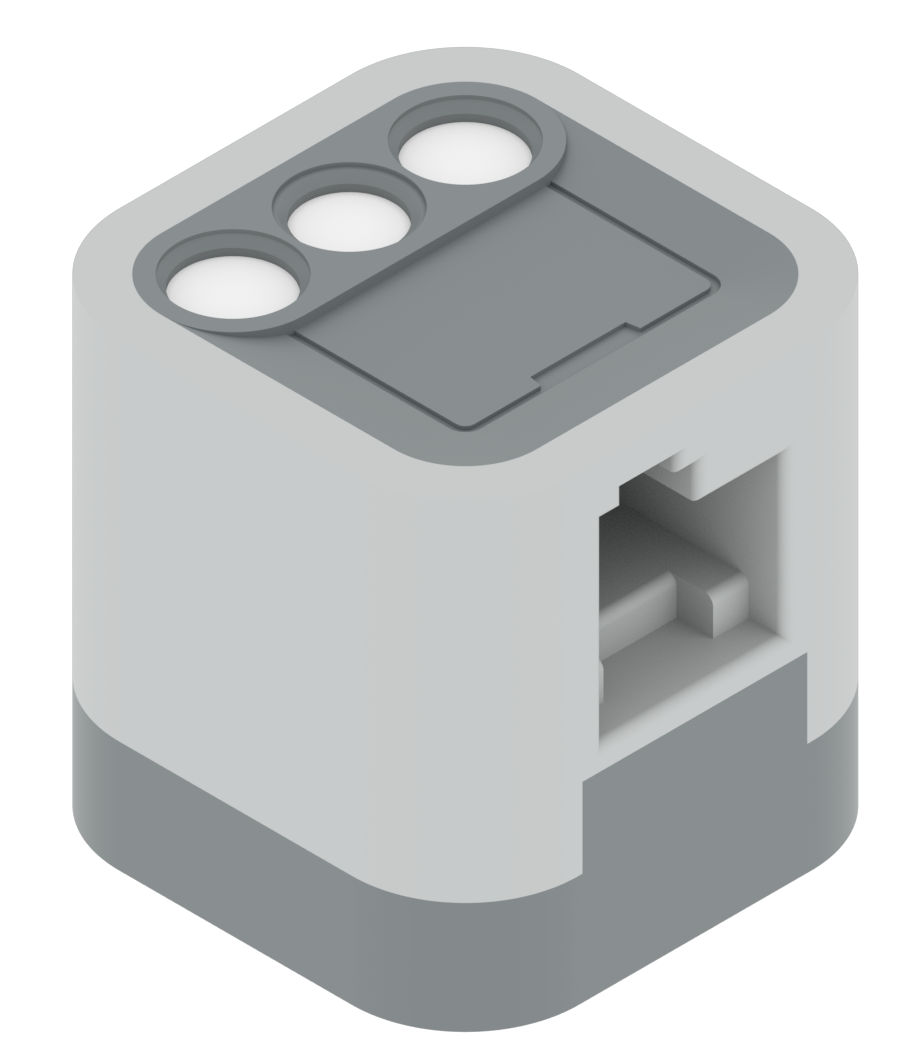
Kosketa LED-valoa

|
- Voi havaita kapasitiivisen kosketuksen, kuten sormen kosketuksen.
- Voidaan asettaa näyttämään useita värejä.
|
- Robottitoiminnon käynnistäminen kosketettaessa
- Ohjelman käynnistäminen tai keskeyttäminen kosketettaessa
- Eri värien näyttäminen ohjelman eri osissa, joten on helpompi löytää koodi vianmääritystä varten.
|
|
Värisensori
|
-
Käyttää heijastuvaa valoa kohteen havaitsemiseen
- väri
- sävyn arvo
- harmaasävyarvo
- kirkkaus
- läheisyys.
|
- Vuorovaikutus tietyn värisen kohteen kanssa, esimerkiksi lajitettaessa esineitä värin mukaan.
- Värillisen kohteen numeerisen sävyarvon määrittäminen. Nämä tiedot voivat olla hyödyllisiä värianturin vianmäärityksessä erilaisissa valaistusolosuhteissa.
- Sen ymmärtäminen, kuinka anturi havaitsee värit vaihtelevissa valaistusolosuhteissa.
- Viivan havaitseminen
- Havaitsee, onko esine läsnä
|
|
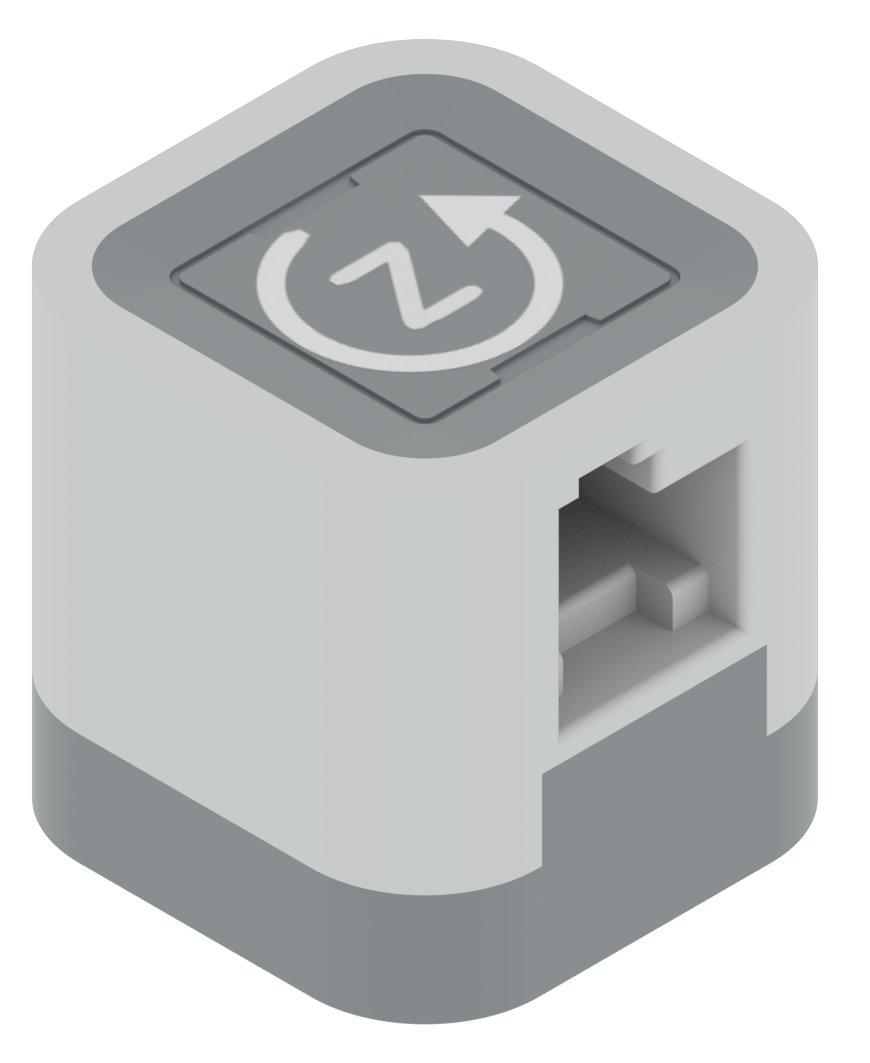
Gyro anturi
|
- Tunnistaa robotin nopeuden ja pyörimisen
|
- Suoran ajon ylläpitäminen
- Tarkkojen käännösten tekeminen
|
|
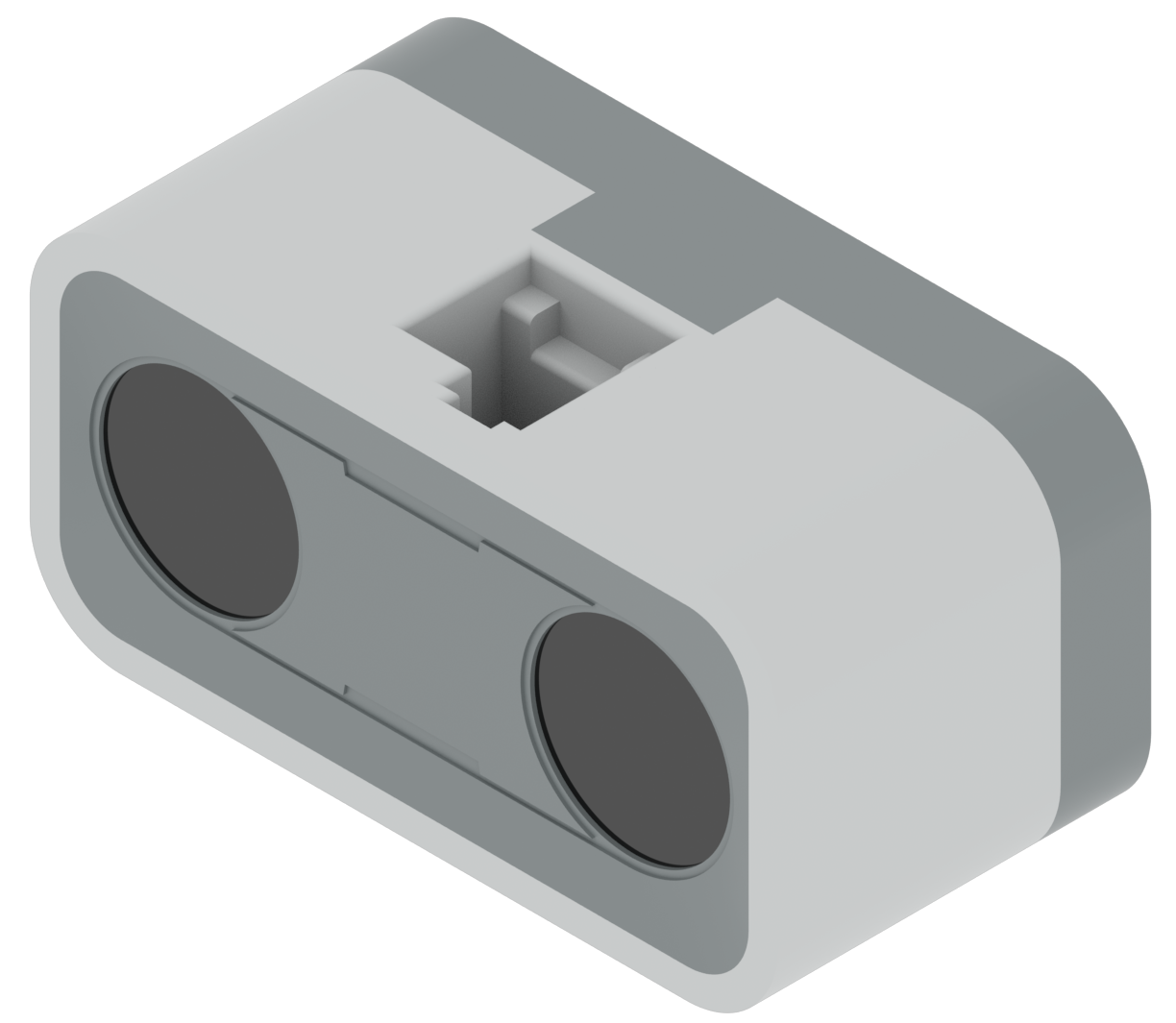
Etäisyys anturi
|
- Havaitsee, onko sen edessä esinettä
- Mittaa itsensä ja kohteen välisen etäisyyden
|
- Ajaminen tietylle etäisyydelle esineen, kuten seinän tai peliobjektin, edessä
- Aja eteenpäin, kunnes se havaitsee, että se on tietyn matkan päässä seinästä, sitten pysähtyy.
- Ajaminen esineelle hakemaan sitä.
- Ajaminen pois kohteesta tai pinnasta, kunnes se on saavuttanut tietyn etäisyyden.
|
Anturin lisätiedot
Lisätietoja yllä olevista antureista on seuraavissa artikkeleissa:
