
El robot utilizado en VIQC Virtual Skills es una versión virtual de Snapshot, el VEX IQ Hero Bot, utilizado para el Slapshot de la Competencia VEX IQ (VIQC) 2022-2023. Virtual Snapshot tiene las mismas dimensiones y motores que el Snapshot físico, pero con sensores adicionales para codificar movimientos autónomos adicionales en VEXcode IQ. En la versión de Slapshot de VEXcode IQ, solo hay un robot y ya está preconfigurado. Esto elimina la necesidad de una configuración de robot o un proyecto de plantilla predeterminado.
Controles de robots
Instantánea tiene los siguientes controles:
Una transmisión con un sensor inercial. Esto permite que la categoría de bloques "Drivetrain" en la Caja de herramientas de VEXcode IQ conduzca y gire el robot.
Un Arm controlado por el motor del brazo. Esto permite al robot liberar discos de algunos de los dispensadores y pasar la barrera para tocar la zona de contacto al final de un partido.
- El brazo se eleva y baja usando el bloque [Girar para] o [Girar a posición]. La posición predeterminada es que el brazo esté bajado.
Una admisión controlada por el motor de admisión. Esto permite que el robot absorba los discos o invierta la entrada (la inversión de la entrada también se denomina salida) para girar los discos hacia afuera y lejos de la entrada y marcarlos.
- La entrada se puede girar usando el bloque [Girar para]. Al girar la entrada 180 grados, se recoge un disco del campo.
- Tanto la entrada como la salida se pueden mover usando el bloque [Spin] . Al hacer girar el motor durante un tiempo determinado y luego detenerlo, puede asegurarse de que el disco se haya retirado de la salida.
Sensores de robots
Virtual Snapshot ha agregado sensores para programación autónoma en VEXcode IQ. Estos sensores se basan en los sensores VEX IQ (segunda generación), incluido el sensor de distancia (segunda generación) y el sensor óptico.
inercial
Un sensor inercial que se utiliza con la transmisión . Esto permite que el robot realice giros precisos y precisos.
El rumbo de la transmisión informa un valor de 0 a 359,9 grados y el sentido de las agujas del reloj es positivo.
Sensor de distancia (segunda generación)
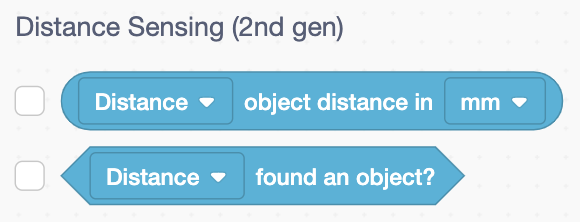
El sensor de distancia informa si un objeto está cerca del sensor, así como la distancia aproximada desde el frente del sensor a un objeto, en milímetros o pulgadas.
El sensor de distancia en la instantánea frontal se puede utilizar para detectar qué tan lejos de la cerca se encuentra actualmente el robot.
Para obtener más información sobre el sensor de distancia IQ (segunda generación), , consulte este artículo de la biblioteca VEX.
Interruptor de parachoques
El interruptor de parachoques informa si se está presionando actualmente o no.
El interruptor de parachoques está ubicado dentro del mecanismo de admisión y se puede usar para determinar si se ha cargado un disco en la admisión.
Para obtener más información sobre el interruptor de parachoques, consulte esta Biblioteca VEX artículo.
Sensor óptico
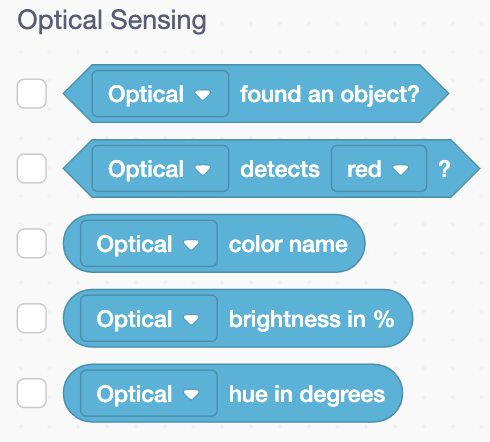
El sensor óptico utiliza la luz reflejada para detectar el color, el valor de tono, el valor de escala de grises y la proximidad de un objeto.
El Sensor Óptico ubicado en el frente Snapshot se utiliza para detectar el color de los dispensadores.
Esto puede resultar útil a la hora de determinar con qué dispensador interactuar y cómo debe responder el robot al dispensador para liberar los discos.