
El robot utilizado en VRC Virtual Skills es una versión virtual de Disco, el VEX V5 Hero Bot, utilizado para 2022. -2023 Spin Up del Concurso de Robótica VEX (VRC). Virtual Disco tiene las mismas dimensiones y motores que el Disco físico, pero con sensores añadidos para programación autónoma en VRC Virtual Skills. En VRC Virtual Skills, solo hay un robot y ya está preconfigurado. Esto elimina la necesidad de una configuración de robot o un proyecto de plantilla predeterminado.
Controles de robot
Disco tiene los siguientes controles:
Un drivetrain. Esto permite que la categoría de bloques "Drivetrain" en la caja de herramientas de VEXcode V5 conduzca y gire el robot.
Una admisión que está controlada por el Intake Motor Group. Esto permite al robot recolectar y puntuar discos.
La admisión se puede girar usando el grupo del motor de admisión y el bloque [Girar para]. Al girar el grupo motor en la dirección de "entrada", los discos se moverán hacia las fichas del campo, mientras que al girar en la dirección de "entrada", podrás lanzar discos al aire para anotar en el objetivo alto.
En la parte superior de la entrada hay un juego de dos ruedas. Estos se pueden utilizar para hacer girar los rodillos.
Al hacer girar el grupo del motor de admisión mientras las ruedas están en contacto con el rodillo, el rodillo girará y cambiará de color.
Sensores de robot
Virtual Disco ha añadido sensores para programación autónoma en VRC Virtual Skills.
Sensor de inercia
El sensor inercial se utiliza con la transmisión para permitir que Disco realice giros exactos y precisos utilizando el rumbo de la transmisión.
El rumbo de la transmisión informa un valor de 0 a 359,9 grados y el sentido de las agujas del reloj es positivo.
Para obtener más información sobre el sensor inercial, consulte este artículo de la biblioteca VEX.
Sensor de distancia
Hay un sensor de distancia en el frente de Virtual Disco.
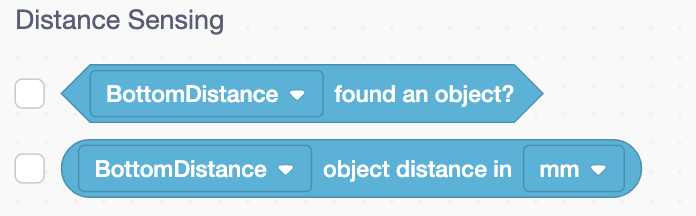
El sensor de distancia informa si un objeto está cerca del sensor, así como la distancia aproximada desde la parte frontal del sensor a un objeto, en milímetros o pulgadas.
El sensor de distancia en la parte frontal de Disco se puede usar para determinar si un disco está frente a la entrada, o aproximadamente qué tan lejos están los discos en el campo del sensor.
Para obtener más información sobre el sensor de distancia V5, consulte este artículo de la biblioteca VEX.
Rastreadores de línea
Los tres rastreadores de línea están ubicados en la parte inferior de la entrada de Disco. Estos se pueden utilizar para detectar la posición de los discos dentro de la entrada y determinar cuántos discos se encuentran actualmente en la entrada.
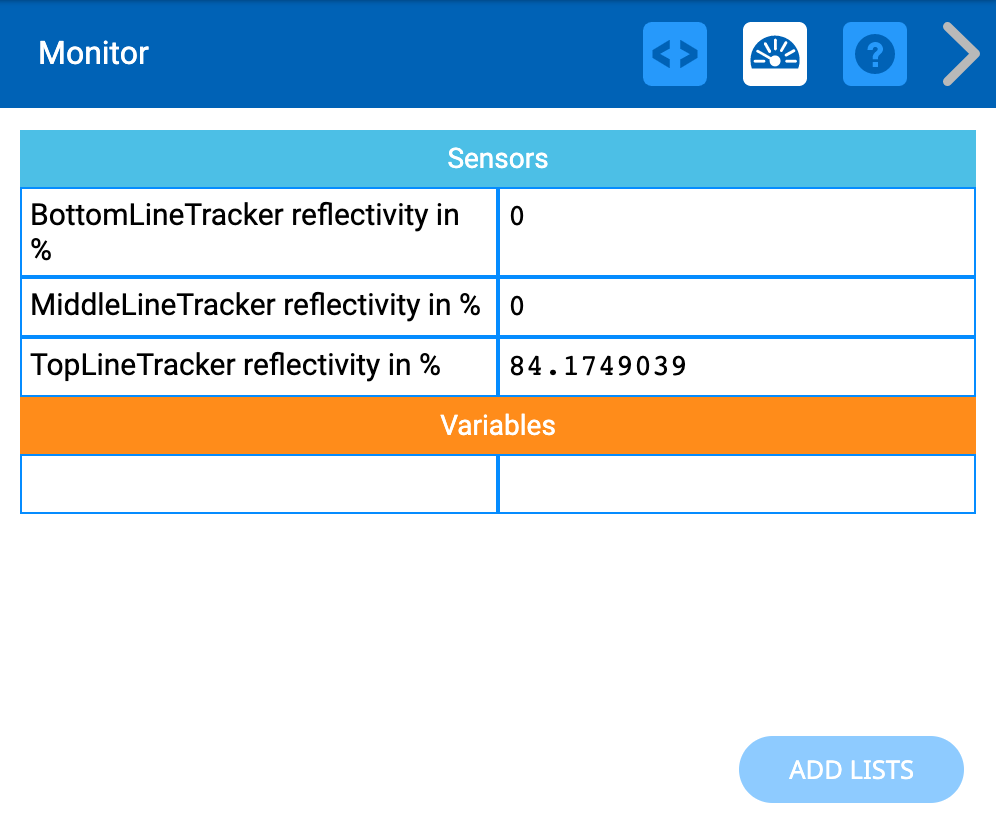
Los rastreadores de línea son un sensor de 3 hilos que consta de un LED infrarrojo y un sensor de luz infrarroja. Miden la reflectividad de la superficie. Al codificar Line Trackers, es importante comprender los diferentes valores de reflectividad que se informarán según el entorno. En este ejemplo, hay un disco actualmente cargado en la parte superior de la entrada, por lo que Top Line Tracker informa un valor de reflectividad más alto.
Para obtener más información sobre los rastreadores de línea VEX V5, consulte este artículo.
Para obtener más información sobre cómo monitorear los valores de los sensores en un proyecto de VRC Virtual Skills (que se muestra en la imagen aquí), consulte este artículo.
Sensor óptico
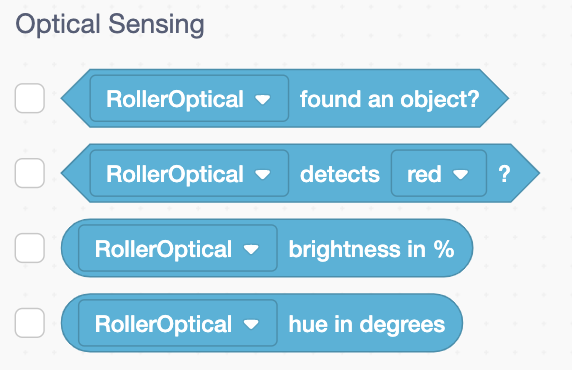
El Optical Sensor informa si un objeto está cerca del sensor y, de ser así, de qué color es ese objeto.
El sensor óptico también puede informar el brillo y el valor de tono de un objeto en grados.
El sensor óptico está ubicado en la parte superior de Disco, cerca de las ruedas. Este sensor se posiciona a la altura de los rodillos para ser utilizado para determinar el color de cada rodillo.
Para obtener más información sobre el sensor óptico, , consulte este artículo de la biblioteca VEX.
Sensor del sistema de posicionamiento de juegos (GPS)
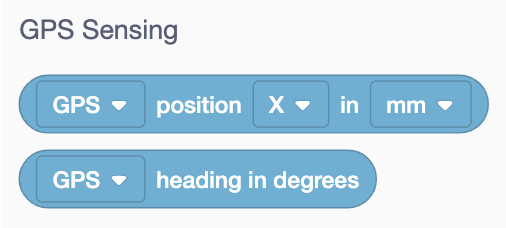
El sensor GPS puede informar la posición actual X e Y del centro de rotación de Disco en milímetros o pulgadas.
El sensor GPS también puede informar el rumbo actual en grados.
El sensor GPS está ubicado cerca de la parte trasera de Disco y se utiliza para determinar la posición y orientación del robot en el campo leyendo las tiras de códigos de campo GPS a lo largo del perímetro interior del campo.
Puede utilizar el sensor GPS para ayudar a Disco a navegar por el campo conduciendo a ubicaciones específicas utilizando su conocimiento del sistema de coordenadas cartesianas.
Usando el sensor GPS, Disco puede conducir a lo largo de los ejes X o Y hasta que el valor del sensor sea mayor o menor que un valor umbral. Esto le permite a Disco conducir usando la retroalimentación del sensor en lugar de distancias establecidas.
Para obtener más información sobre cómo identificar los detalles de la ubicación en VRC Virtual Skills usando el sensor GPS, , consulte este artículo de la biblioteca VEX.