This article is not viewable in your language. Please check back at a future date.
La traducción de este artículo fue completada mediante traducción automática. Por favor, perdone los posibles errores.
Los sensores brindan a un robot la capacidad de recibir información del entorno. Hay una variedad de sensores VEX IQ (1.ª generación) que se pueden utilizar para obtener diferentes tipos de entradas para el robot. La siguiente tabla proporciona una descripción general de lo que puede hacer cada sensor y ejemplos de cómo se puede utilizar en un proyecto.
Tabla comparativa de sensores VEX IQ (1.ª generación)
| Sensor |
Función |
Ejemplos de usos |
|
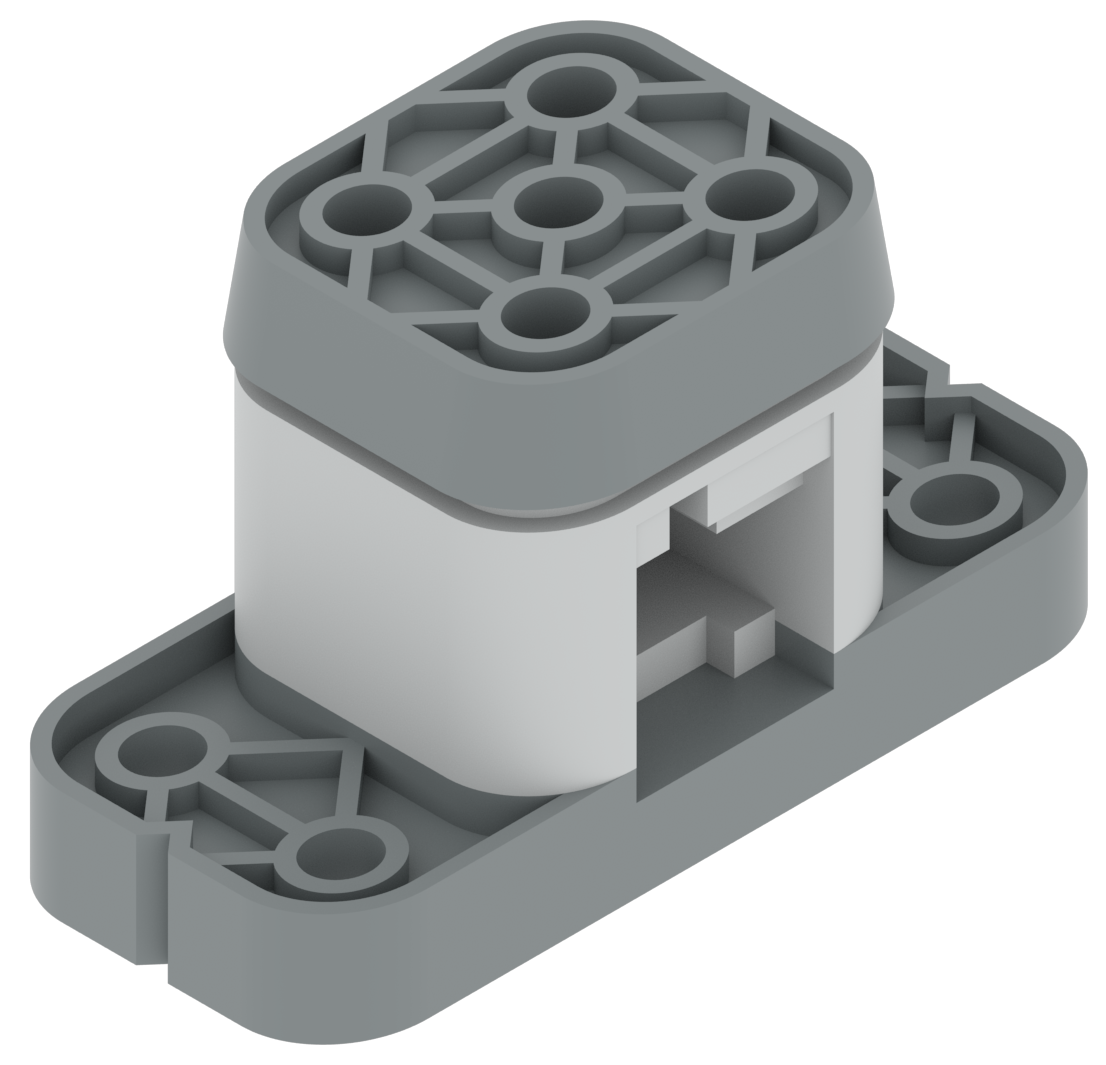
Interruptor de parachoques
|
- Le indica al robot si su parachoques está presionado (valor del sensor de 1) o liberado (valor del sensor de 0).
|
- Detectar si el robot ha chocado contra un objeto, como la pared de un laberinto o un objeto de juego.
- Activar una acción del robot, cuando se presiona o se suelta.
- Alternar para encender o apagar motores cuando se presiona.
- Detectar otras partes del robot, como un brazo, cuando presiona el parachoques.
|
|
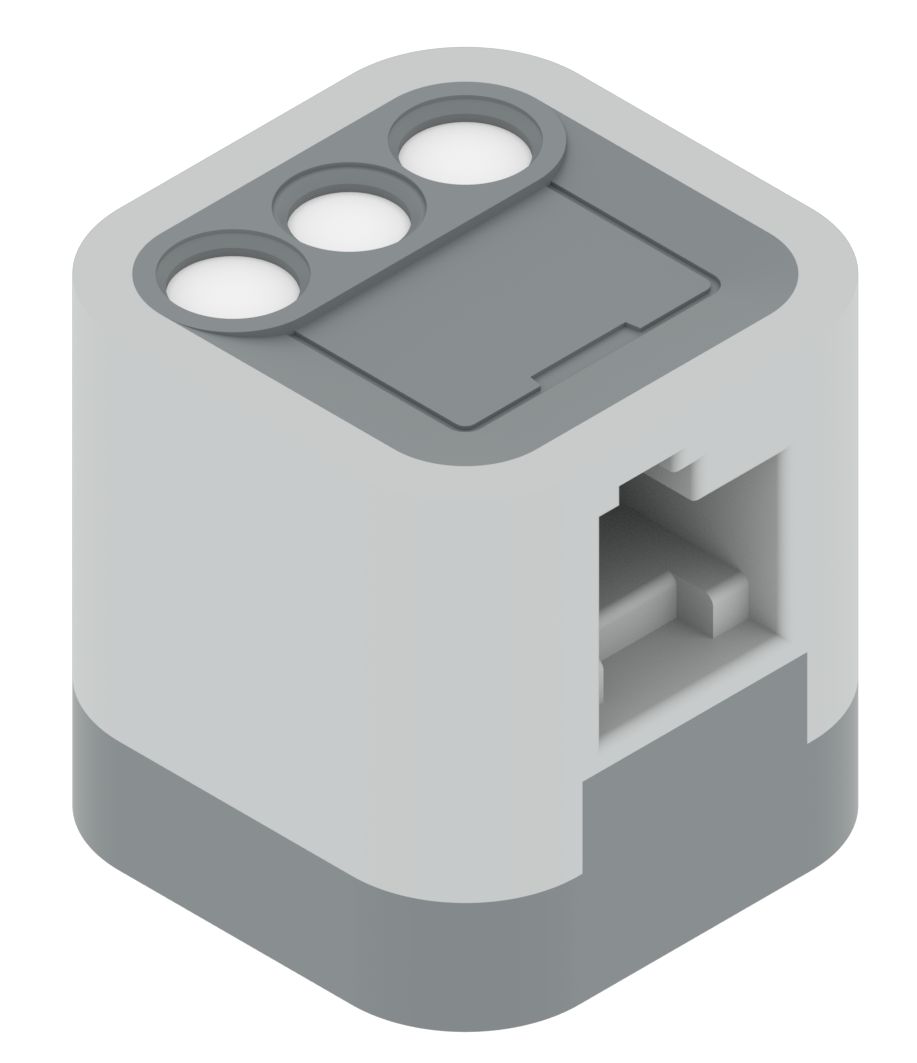
LED táctil

|
- Puede detectar un toque capacitivo, como el toque de un dedo.
- Se puede configurar para que muestre muchos colores.
|
- Activar una acción del robot cuando se toca
- Iniciar o pausar un programa cuando se toca
- Mostrar diferentes colores durante diferentes partes de un programa, por lo que es más fácil identificar el código para solucionar problemas.
|
|
Sensor de color
|
-
Utiliza luz reflejada para detectar un objeto.
- color
- valor de tono
- valor en escala de grises
- brillo
- proximidad.
|
- Interactuar con un elemento de cierto color, como al clasificar objetos por color.
- Determinar el valor numérico del tono de un objeto coloreado. Estos datos pueden resultar útiles a la hora de solucionar problemas del sensor de color en condiciones de iluminación variadas.
- Comprender cómo el sensor detecta el color en distintas condiciones de iluminación.
- Detectando una línea
- Detectar si un objeto está presente
|
|
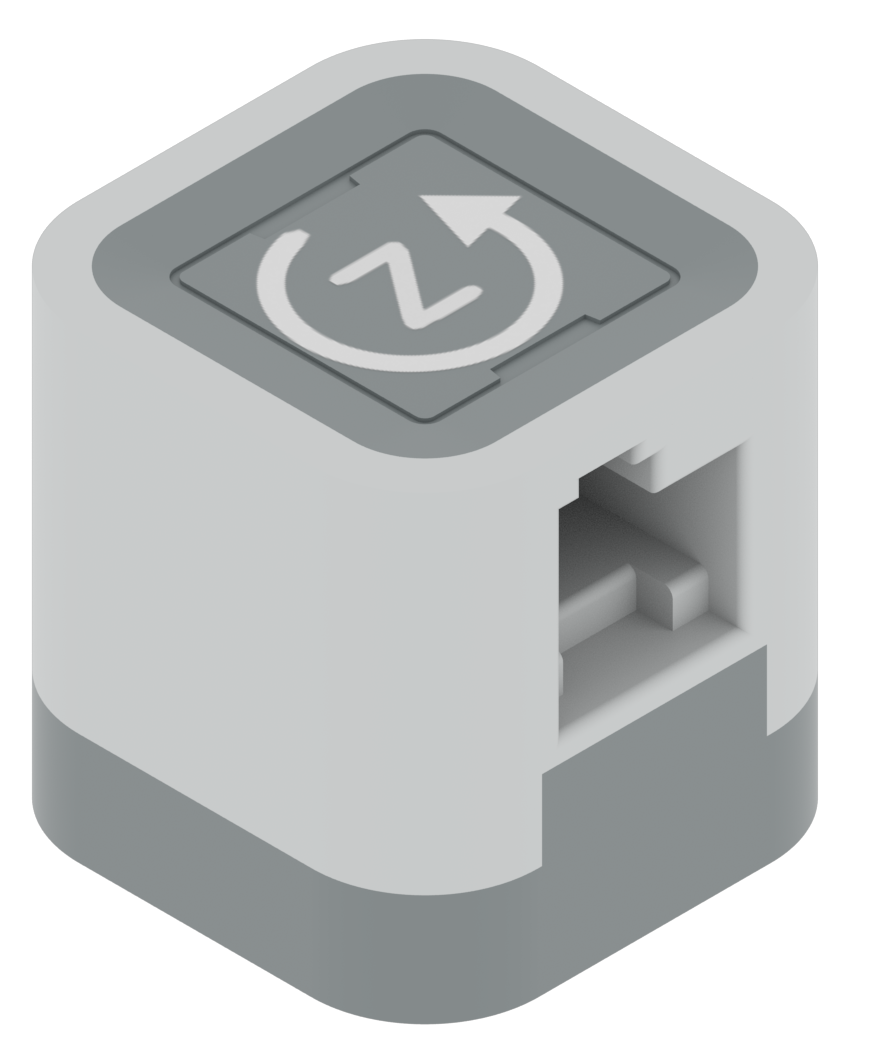
Sensor giroscópico
|
- Detecta la velocidad y rotación del robot.
|
- Mantener una conducción recta
- Hacer giros precisos
|
|
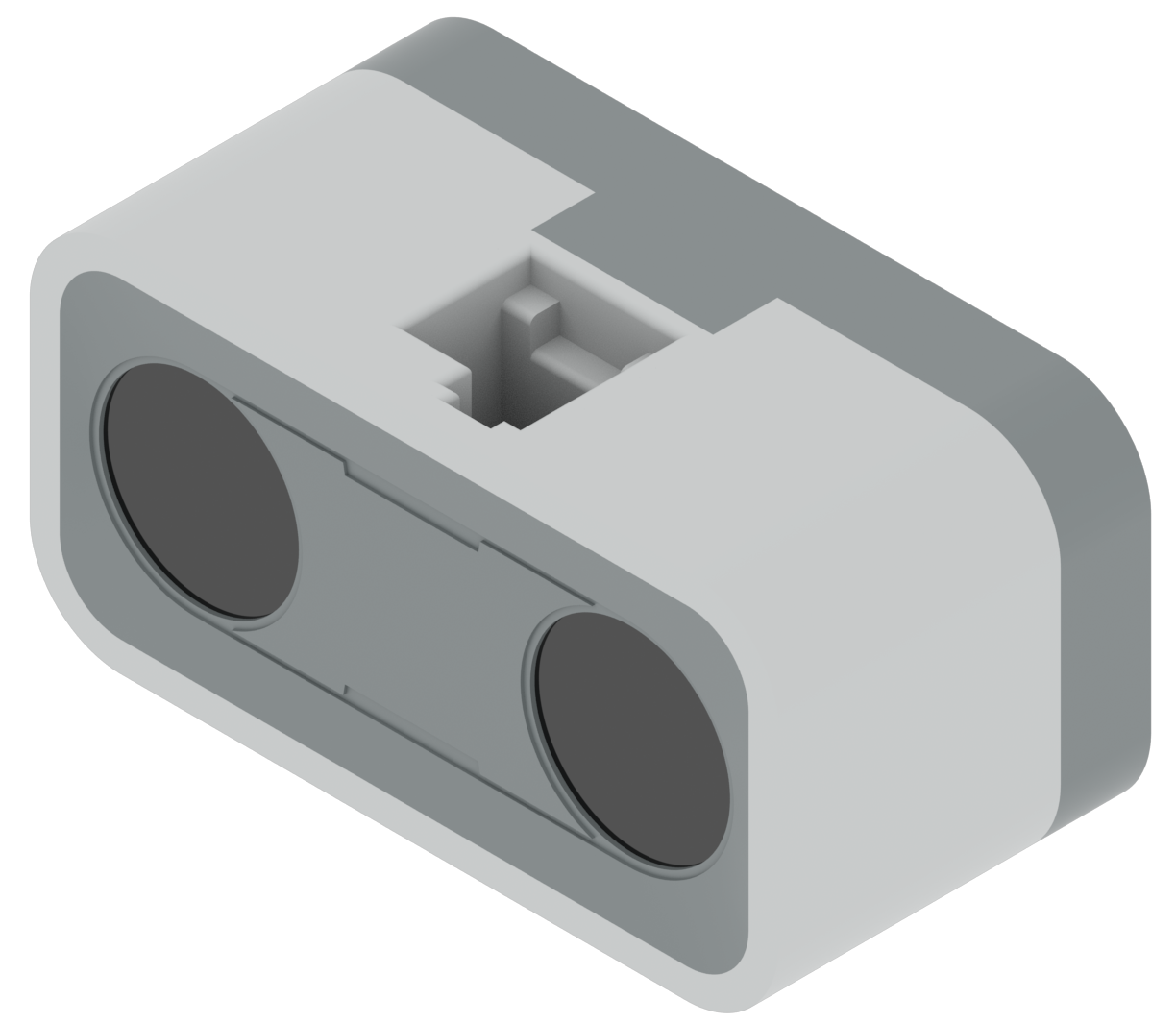
Sensor de distancia
|
- Detecta si hay un objeto delante de él.
- Mide la distancia entre él mismo y un objeto.
|
- Conducir a cierta distancia frente a un objeto, como una pared o un objeto de juego.
- Avanza hasta detectar que se encuentra a cierta distancia de una pared y luego se detiene.
- Conducir hacia un objeto para recogerlo.
- Alejarse de un objeto o superficie hasta alcanzar una distancia determinada.
|
Información adicional sobre sensores
Para obtener información detallada sobre los sensores anteriores, consulte los siguientes artículos:
