This article is not viewable in your language. Please check back at a future date.
This article's translation was completed by machine translation. Please forgive any possible errors.
Sensors provide the ability for a robot to receive feedback from the environment. There are a variety of VEX IQ (1st gen) sensors that can be used to obtain different types of input for the robot. The table below provides an overview of what each sensor can do, and examples of how it can be used in a project.
VEX IQ (1st gen) Sensor Comparison Table
| Sensor |
Function |
Example Uses |
|
Bumper Switch
|
- Tells the robot whether its bumper is pressed (sensor value of 1) or released (sensor value of 0).
|
- Detecting if the robot has bumped into an object, such as a maze wall or game object
- Triggering a robot action, when pressed or released.
- Toggling to turn on or off motors when pressed.
- Detecting other parts of the robot, such as an arm, when it presses in the bumper.
|
|
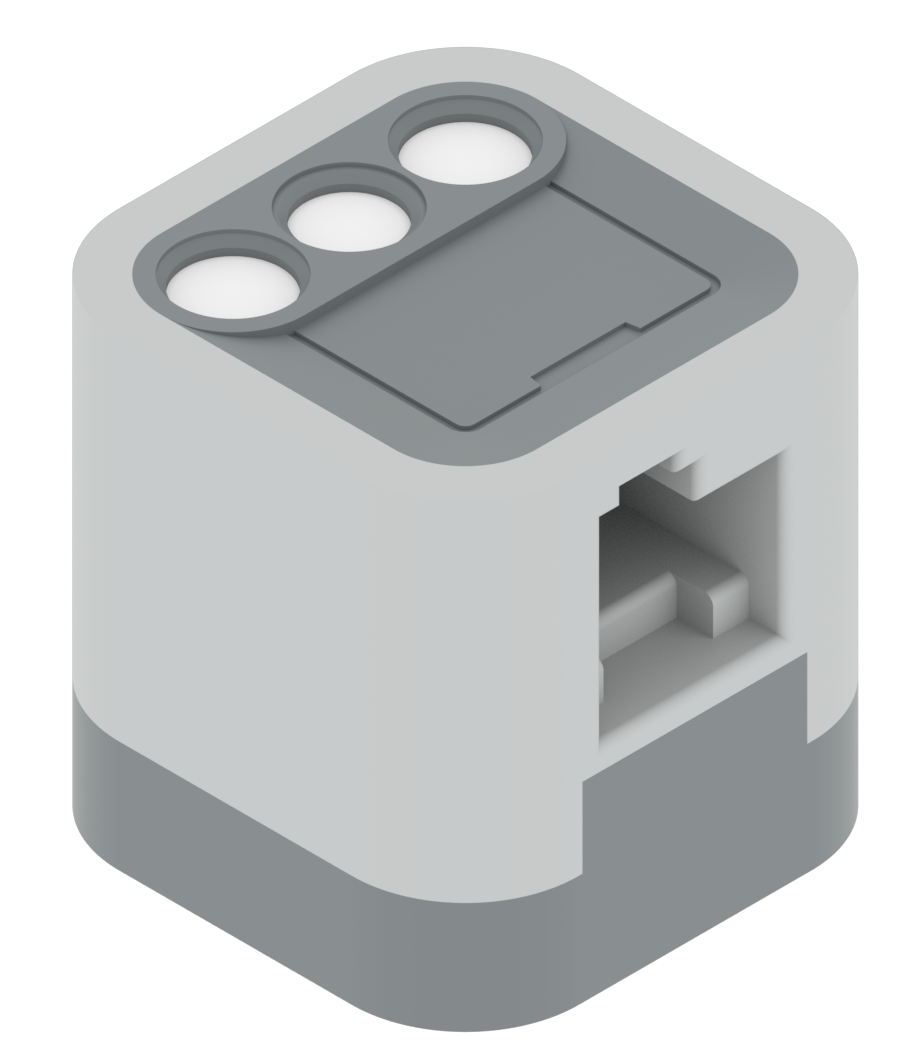
Touch LED

|
- Can detect capacitive touch, such as the touch of a finger.
- Can be set to display many colors.
|
- Triggering a robot action when touched
- Starting or pausing a program when touched
- Displaying different colors during different parts of a program, so it is easier to pinpoint code for troubleshooting.
|
|
Color Sensor
|
-
Uses reflected light to detect an object’s
- color
- hue value
- grayscale value
- brightness
- proximity.
|
- Interacting with an item of a certain color, such as when sorting objects by color.
- Determining the numerical hue value of a colored object. This data can be useful when troubleshooting the color sensor in varied lighting conditions.
- Understanding how the Sensor is detecting color in varied lighting conditions.
- Detecting a line
- Detecting whether an object is present
|
|
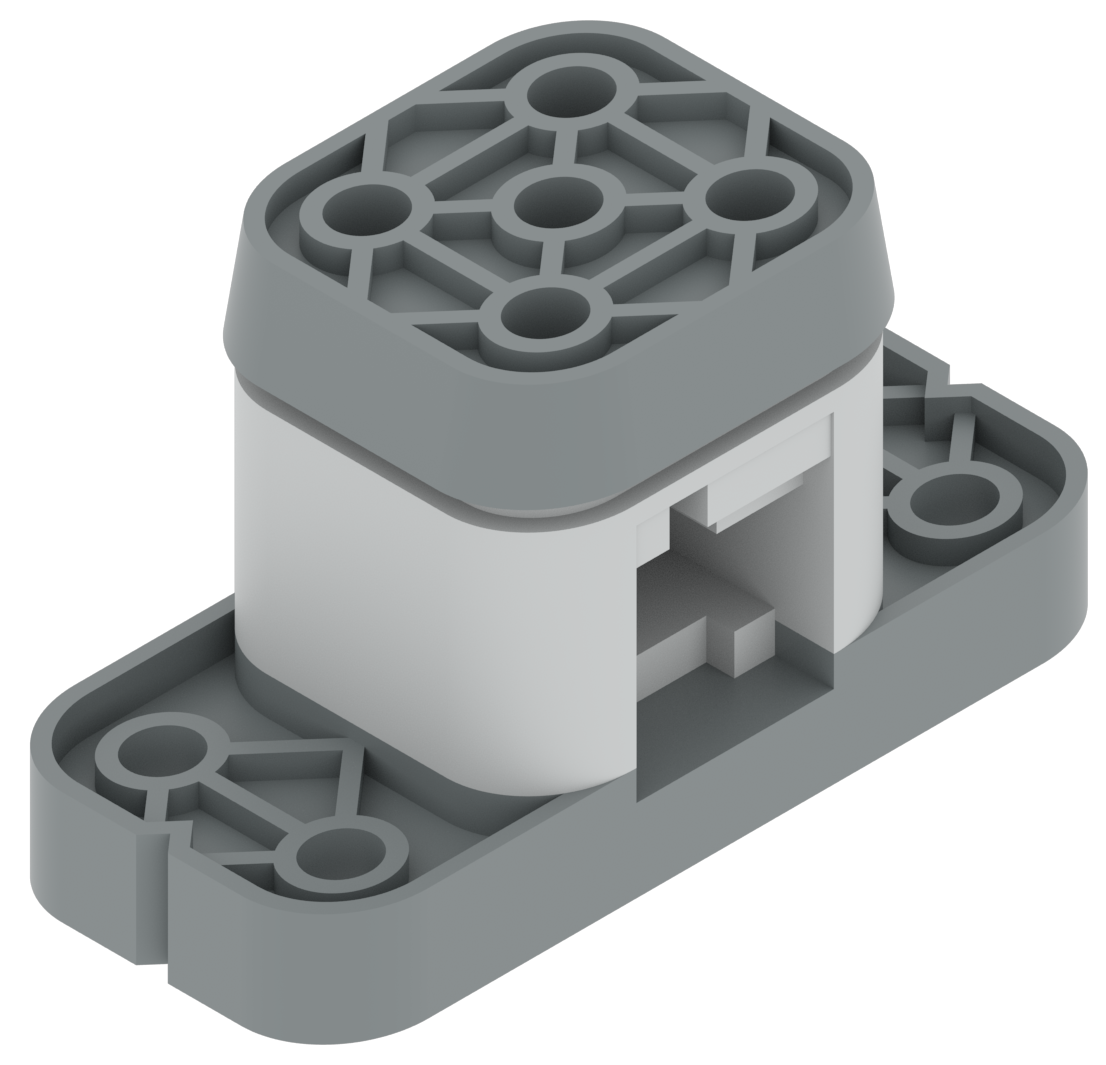
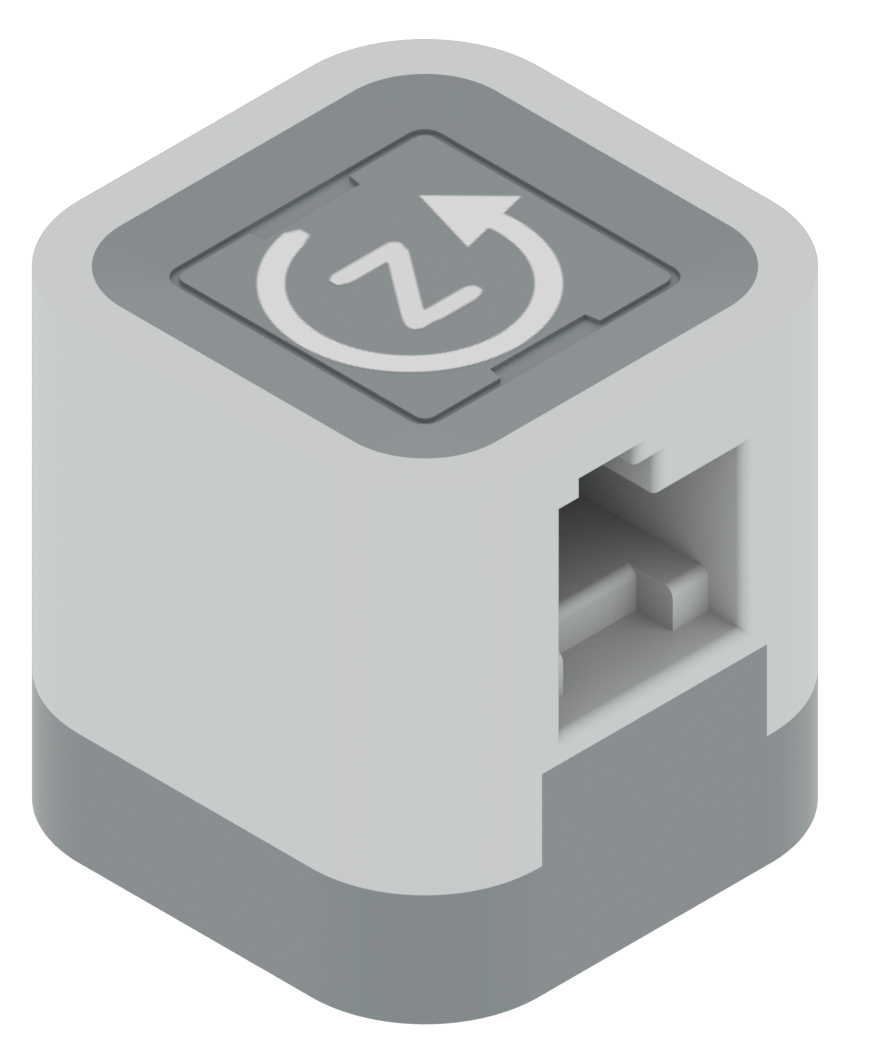
Gyro Sensor
|
- Detects the robot's speed and rotation
|
- Maintaining straight driving
- Making accurate turns
|
|
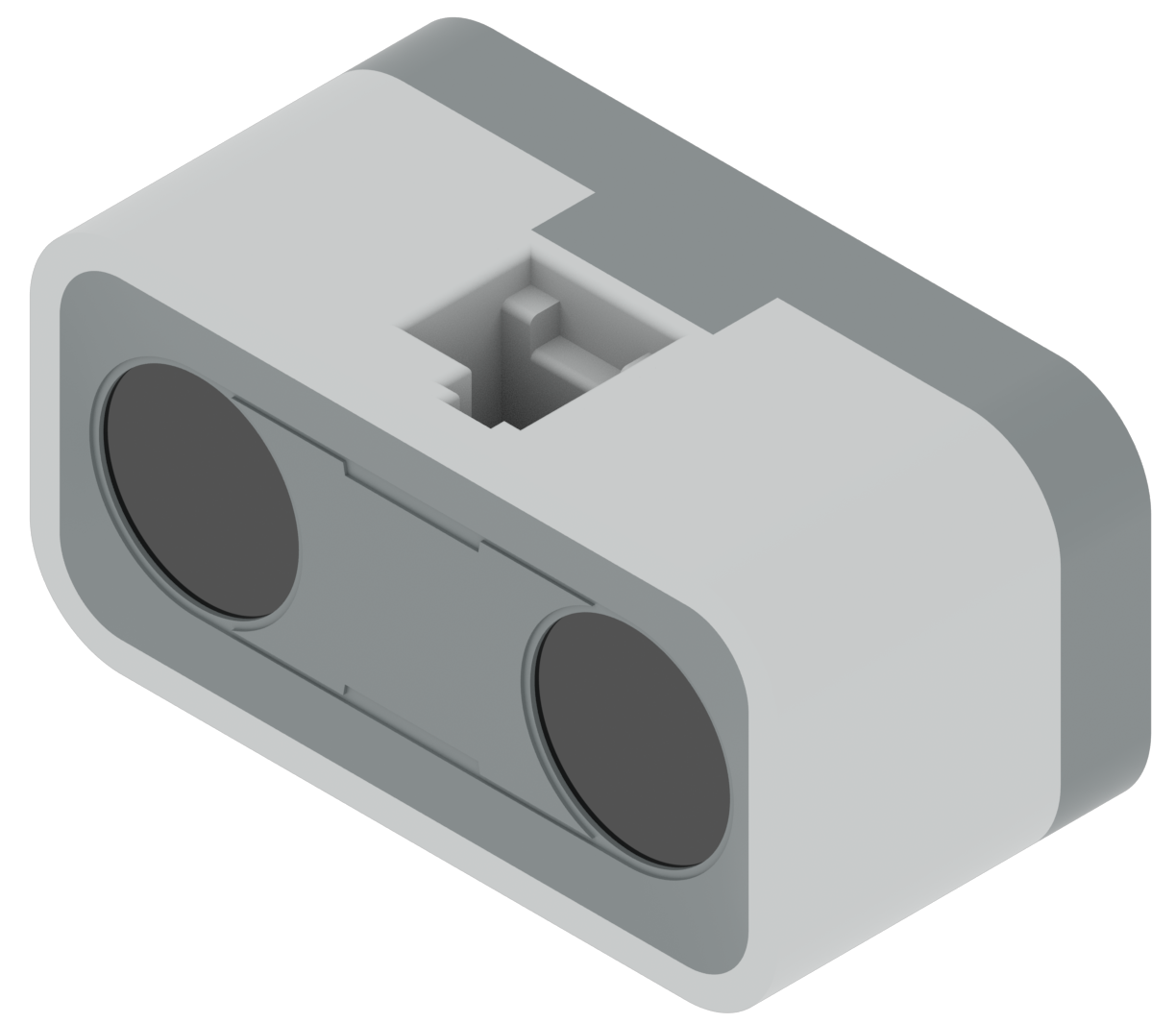
Distance Sensor
|
- Detects if there is an object in front of it
- Measures the distance between itself and an object
|
- Driving to a certain distance in front of an object, such as a wall or game object
- Driving forward until it detects that it is a certain distance away from a wall, then stopping.
- Driving to an object to pick it up.
- Driving away from an object or surface until it has reached a specific distance.
|
Additional Sensor Information
For detailed information on the sensors above, see the following articles:
