This article is not viewable in your language. Please check back at a future date.
Překlad tohoto článku byl dokončen strojovým překladem. Prosím omluvte případné chyby.
Zatímco EXP STEM Lab Units byly navrženy pro VEX EXP Kit a dodržují formát Learn – Practice – Compete, existuje mnoho způsobů, jak tyto STEM Labs učit s vaší V5 Kit. V tomto článku vám poskytujeme zdroje, které vám pomohou přizpůsobit laboratoře EXP STEM Labs, což vám poskytne flexibilitu při výuce laboratorních jednotek V5 i EXP STEM.
Chcete-li se dozvědět, jak ve své třídě propojit laboratoře STEM EXP a V5, podívejte se na tohoto průvodce kumulativním tempem.
Celkové úvahy při výuce laboratorních jednotek EXP STEM se sadami V5
Roboti V5 mají větší půdorys než sestavení EXP. Při vytváření cvičných a výzevových polí možná budete muset zvětšit velikost pole, aby měl Clawbot nebo Speedbot dostatek prostoru pro navigaci. Níže budou uvedena doporučení pro větší velikosti polí pro každou jednotku. Ty lze vytvořit buď pomocí VEX V5 Field Tiles, nebo pomocí pásky na podlaze stejné velikosti.
Úvodní lekce
Lekce 1 v každé laboratorní jednotce STEM zahrnuje úvod do soutěže na konci jednotky a také kontrolu úrovně baterie na baterii a ovladači a přípravu na použití VEXcode EXP. V níže uvedených článcích se dozvíte, jak zkontrolovat úrovně baterie V5 a připravit se na použití VEXcode V5.
Následující část identifikuje EXP STEM Lab, sestavení EXP, které se používá pro danou jednotku, a kompatibilní sestavení V5, které můžete použít k dokončení cvičení a úkolů. Součástí jsou také návrhy na přizpůsobení soutěží v rámci každé jednotky.
Tag Freeze týmu
V této jednotce budete řídit BaseBota pomocí ovladače, vybírat kola a přidávat senzory, abyste mohli soutěžit v soutěži Team Freeze Tag! Zde naleznete jednotku Team Freeze Tag Unit.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
BaseBot
|
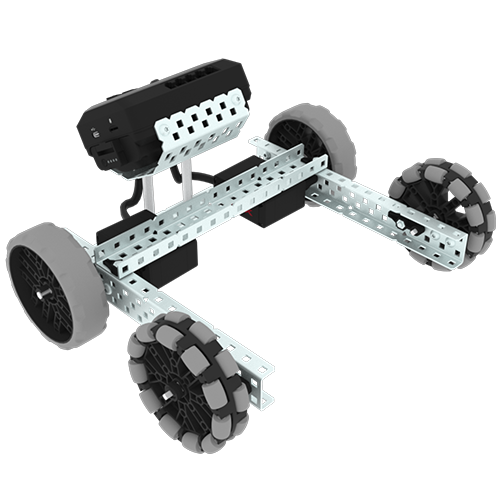
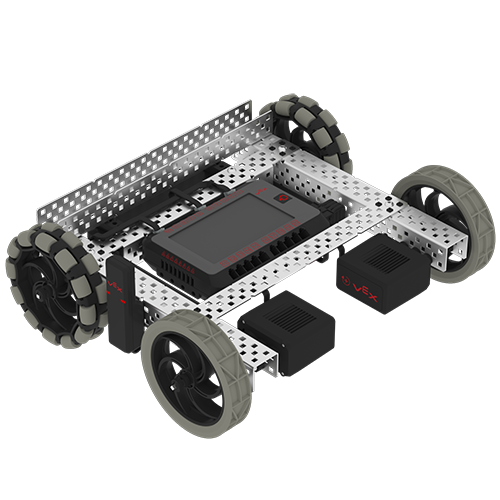
Speedbot
|
- Pro všechny aktivity se doporučuje používat pole 6' x 8' (~180 cm x 240 cm), aby roboti měli více místa pro navigaci.
- Všechny aktivity využívající Buckyballs lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě přibližně stejné velikosti (průměr 4 palce/10 cm).
- Lekce 3: Startovací sady V5 se dodávají se dvěma typy kol (Všeobecná a 4" pojezdová kola). Použijte je v aktivitě Cvičení.
- Lekce 4: Přidejte c-kanál do přední části robota, který vám pomůže s označováním. Nárazník lze namontovat na zadní stranu robota na c-kanál nad baterií.
|
Robotický fotbal
V této jednotce prozkoumáte, jak na svém robotovi vytvořit manipulátor, který dokáže jako robotický fotbalista uchopit, přihrát a vstřelit co nejvíce gólů v soutěži Robot Soccer! Viz Robot Fotbal Unit zde.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
Clawbot
|
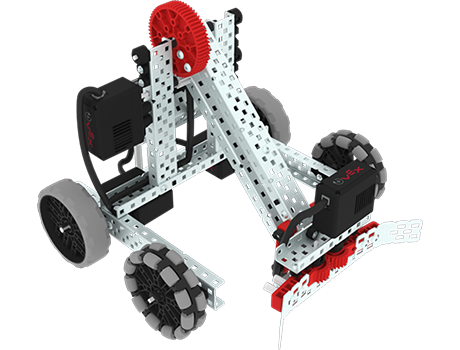
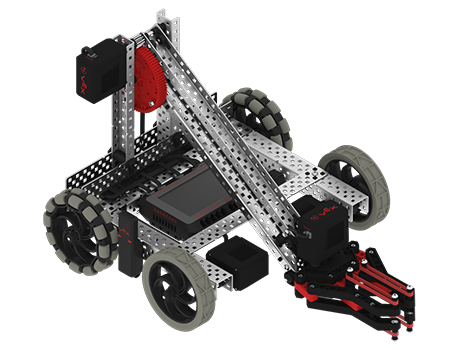
Clawbot
|
- Všechny aktivity využívající Buckyballs lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě přibližně stejné velikosti (průměr 4 palce/10 cm).
- Lekce 3: Pro cvičné a náročné aktivity se doporučuje používat 4' x 6' (~120 cm x 180 cm).
- Pro robotickou fotbalovou soutěž se doporučuje použít pole o rozměrech 6' x 8' (~180 cm x 240 cm), aby měli roboti více prostoru pro navigaci.
|
Nahoru a znovu
V této jednotce prozkoumáte, jak navrhnout Clawbota, aby sbíral, sbíral a přemisťoval Buckyballs z jedné strany hřiště na druhou v soutěži Up and Over! Zde se podívejte na jednotku Up and Over.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
Clawbot
|
Clawbot
|
- Pro všechny cvičné a náročné aktivity se doporučuje použít pole 4' x 6' (~120 cm x 180 cm).
- Všechny aktivity využívající Buckyballs lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě přibližně stejné velikosti (průměr 4 palce/10 cm). Ty lze také nahradit čtvercovými herními prvky, které lze skládat na sebe, než skládat Buckyball na prsten.
- Lekce 4: K vytvoření bariéry můžete použít další kov ze sady nebo jiné učební materiály, jako je karton. Bariéra by měla být 4-5 palců (~10-12 cm) vysoká a pokrývat šířku pole.
- Pro soutěž Up and Over se doporučuje použít pole 6' x 8' (~180 cm x 240 cm), aby roboti měli více prostoru pro navigaci.
|
Ničitel hradu
V této jednotce prozkoumáte, jak používat optické senzory a senzory vzdálenosti k hledání, bourání a odstraňování „hradů“ Buckyball, abyste získali body v soutěži Castle Crasher! Zde se podívejte na jednotku Castle Crasher.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
BaseBot
|
Speedbot
|
- Pro všechny cvičné a náročné aktivity, stejně jako soutěž Castle Crasher, se doporučuje použít vyvýšené pole 4' x 4' (~120 cm x 120 cm).
- Možná budete chtít zvětšit velikost na 5' x 5' (~150 cm na 150 cm), aby roboti měli více prostoru pro navigaci v poli.
- Všechny aktivity využívající Buckyballs lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě přibližně stejné velikosti (průměr 4 palce/10 cm). Ty mohou být také nahrazeny čtvercovými herními prvky, které lze skládat na sebe, než vytvářet hromádky Buckyballů.
- Lekce 3 a 4 poskytují doporučené montážní polohy pro snímače vzdálenosti a optické snímače. Přidejte C-kanál na přední část Speedbotu, který bude použit jako montážní místo pro senzory.
|
Honba za pokladem
V této jednotce postavíte a nakódujete Clawbota s optickým senzorem, abyste poznali a sbírali červené kuličky, abyste mohli soutěžit v soutěži Hledání pokladu! Zde se podívejte na jednotku lovu pokladů.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
Clawbot
|
Clawbot
|
- Pro všechny cvičné a výzvové aktivity, stejně jako soutěž v hledání pokladu, se doporučuje použít pole o rozměrech 3' x 5' (~90 cm x 150 cm) s jednou stěnou odstraněnou ze vzdáleného konce, aby se vytvořil otvor pro ‚domácí zónu .'
- Možná budete chtít zvětšit velikost na 4' x 6' (~120 cm na 180 cm), aby roboti měli více prostoru pro navigaci v poli.
- Všechny aktivity využívající Buckyballs lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě přibližně stejné velikosti (průměr 4 palce/10 cm).
- Měli byste mít dva objekty, které jsou červené a šest jiné barvy.
|
Vedoucí kruhu
V této jednotce prozkoumáte rozdíl mezi řízením řidiče a autonomním pohybem, protože používáte více programů (autonomní a řidičské řízení), abyste získali kroužky na různě velkých postech v soutěži Ring Leader! Viz jednotka Ring Leader zde.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
Clawbot
|
Clawbot
|
- Pro všechny cvičné a náročné aktivity, stejně jako soutěž Ring Leader, se doporučuje použít pole 3' x 5' (~90 cm x 150 cm) s připojenými sloupky různých velikostí.
- Příspěvky jsou vytvářeny pomocí C-kanálů spojených dohromady. Následující podrobnosti můžete použít k opětovnému vytvoření sloupků pomocí sady V5 nebo k vytvoření sloupků podobné výšky pomocí jiných objektů ve třídě.
- Malý sloupek je 1x2x1x8 C-Channel připevněný vertikálně k poli (přibližně 100 mm vysoký).
- Střední sloupek je 1x2x1x8 C-Channel a 1x2x1x12 C-Channel připevněný vertikálně k poli (přibližně 250 mm vysoký).
- Velký sloupek je dva 1x2x1x8 C-Channel a 1x2x1x12 C-Channel připojený vertikálně k poli (přibližně 350 mm vysoký).
- Všechny aktivity využívající kroužky lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě zhruba stejné velikosti (průměr 4 palce/10 cm) se středovým otvorem pro umístění na sloupky.
|
Umisťovač plošiny
V této jednotce prozkoumáte design manipulátoru, včetně výtahů, abyste mohli svého robota pohánět tak, aby umisťoval prsteny a kuličky na plošiny různých výšek a získával body. V soutěži Ring Leader se týmy spojí, aby vyvinuly herní strategii pro tým se dvěma roboty, aby se pokusili vyhrát soutěž! Zde se podívejte na jednotku pro umístění plošiny.
| Sestavení EXP |
Doporučená verze V5 |
Adaptace |
Clawbot
|
Clawbot
|
- Pro cvičné a náročné aktivity pro lekce 2 a 3 a pro cvičnou aktivitu pro lekci 4 se doporučuje použít pole 4' x 4' se stěnami (přibližně 120 cm x 120 cm) s připojenými plošinami.
- Pro aktivitu ve výzvě pro lekci 4 se doporučuje použít pole 4' x 6' se stěnami (přibližně 120 cm x 180 cm) s připojenými plošinami.
- Pro soutěž o umístění plošiny se doporučuje použít pole 6' x 6' se stěnami (přibližně 180 cm x 180 cm) s připojenými plošinami.
- Plošiny jsou vytvořeny pomocí jakýchkoli dalších kovových dílů ze sady a políček. Následující podrobnosti můžete použít k opětovnému vytvoření platforem pomocí sady V5 nebo k vytvoření platforem podobných výšek pomocí jiných objektů ve třídě.
- Střední platformu se doporučuje zvednout přibližně 20 cm nebo 8 palců od pole.
- Vysoká platforma se doporučuje zvedat přibližně 40,5 cm nebo 16 palců od pole.
- Všechny aktivity využívající kroužky lze nahradit jinými kruhovými herními prvky nebo předměty ve třídě zhruba stejné velikosti (průměr 4 palce/10 cm) se středovým otvorem.
|
