
الروبوت المستخدم في VRC Virtual Skills هو نسخة افتراضية من Disco، VEX V5 Hero Bot، المستخدم في 2022 -2023 مسابقة VEX للروبوتات (VRC). يتمتع Virtual Disco بنفس أبعاد ومحركات الديسكو الفعلي، ولكن مع أجهزة استشعار إضافية للبرمجة المستقلة في VRC Virtual Skills. في VRC Virtual Skills ، يوجد روبوت واحد فقط ، وقد تم تكوينه مسبقًا بالفعل. هذا يلغي الحاجة إلى تكوين الروبوت ، أو مشروع نموذج محدد مسبقًا.
ضوابط الروبوت
ديسكو لديه الضوابط التالية:
مجموعة نقل. يتيح ذلك لفئة "Drivetrain" للكتل في Toolbox الخاص بـ VEXcode V5 قيادة الروبوت وتحويله.
كمية يتم التحكم فيها بواسطة Intake Motor Group. وهذا يسمح للروبوت بجمع الأقراص وتسجيلها.
يمكن تدوير المدخل باستخدام مجموعة محرك السحب وكتلة [Spin for]. سيؤدي تدوير المجموعة الحركية في اتجاه "الإخراج" إلى تحريك الأقراص نحو مربعات الملعب، بينما يتيح لك الدوران في اتجاه "الدخول" إطلاق الأقراص في الهواء لتسجيل الهدف العالي.
في الجزء العلوي من المدخول توجد مجموعة من عجلتين. يمكن استخدامها لتدوير البكرات.
من خلال تدوير مجموعة محرك السحب أثناء ملامسة العجلات للأسطوانة، ستدور الأسطوانة ويتغير لونها.
مجسات الروبوت
أضاف Virtual Disco أجهزة استشعار للبرمجة المستقلة في VRC Virtual Skills.
جهاز استشعار بالقصور الذاتي
يتم استخدام مستشعر القصور الذاتي مع مجموعة نقل الحركة للسماح لديسكو بإجراء دورات دقيقة ودقيقة باستخدام رأس مجموعة نقل الحركة.
يشير عنوان نظام نقل الحركة إلى قيمة تتراوح من 0 إلى 359.9 درجة، ويكون اتجاه عقارب الساعة إيجابيًا.
لمزيد من المعلومات حول مستشعر القصور الذاتي، ، قم بعرض هذه المقالة من مكتبة VEX.
مستشعر المسافة
يوجد مستشعر المسافة في الجزء الأمامي من Virtual Disco.
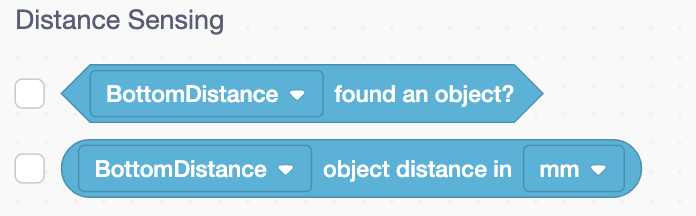
يقوم مستشعر المسافة بالإبلاغ عما إذا كان الكائن قريبًا من المستشعر ، وكذلك المسافة التقريبية من مقدمة المستشعر إلى الجسم ، بالمليمترات أو البوصة.
يمكن استخدام مستشعر المسافة الموجود في الجزء الأمامي من جهاز Disco لتحديد ما إذا كان هناك قرص أمام المدخل، أو مدى بعد الأقراص الموجودة في الحقل عن المستشعر تقريبًا.
لمزيد من المعلومات حول مستشعر المسافة V5، راجع مقالة مكتبة VEX هذه.
أجهزة تتبع الخط
توجد أجهزة تتبع الخط الثلاثة على طول الجانب السفلي من مدخل الديسكو. يمكن استخدامها لاكتشاف موضع الأقراص داخل المدخول وتحديد عدد الأقراص الموجودة حاليًا في المدخول.
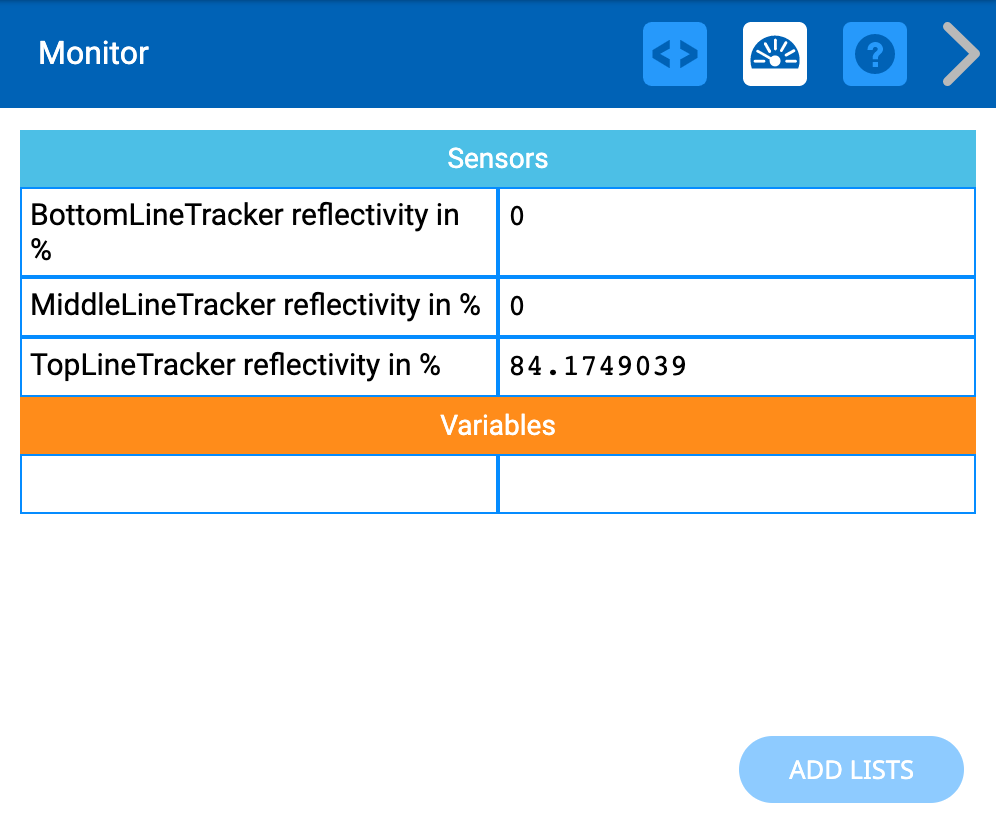
أجهزة تتبع الخط عبارة عن مستشعر ثلاثي الأسلاك يتكون من مصباح LED بالأشعة تحت الحمراء ومستشعر للضوء بالأشعة تحت الحمراء. يقيسون انعكاسية السطح. من المهم عند برمجة Line Trackers فهم قيم الانعكاس المختلفة التي سيتم الإبلاغ عنها اعتمادًا على البيئة. في هذا المثال، يوجد قرص تم تحميله حاليًا في الجزء العلوي من المدخول، لذا يقوم Top Line Tracker بالإبلاغ عن قيمة انعكاسية أعلى.
لمعرفة المزيد حول أجهزة تعقب الخط VEX V5، راجع هذه المقالة.
لمعرفة المزيد حول مراقبة قيم المستشعرات في مشروع المهارات الافتراضية لـ VRC (كما هو موضح في الصورة هنا)، راجع هذه المقالة.
أجهزة الاستشعار البصرية
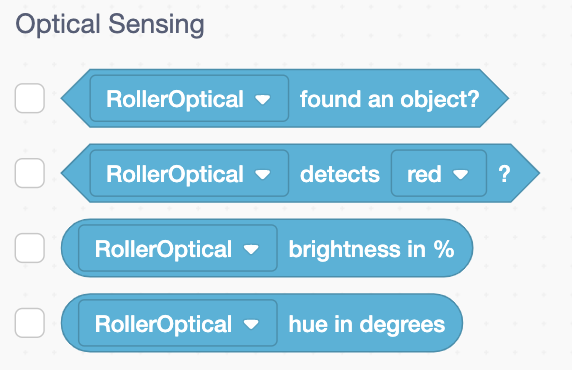
يبلغ المستشعر البصريr ما إذا كان الكائن قريبًا من المستشعر ، وإذا كان الأمر كذلك ، فما لون هذا الكائن.
يمكن للمستشعر البصري أيضًا الإبلاغ عن السطوع وقيمة تدرج اللون للكائن بالدرجات.
يقع المستشعر البصري في الجزء العلوي من الديسكو بالقرب من العجلات. يتم وضع هذا المستشعر على ارتفاع البكرات ليتم استخدامه لتحديد لون كل بكرة
لمزيد من المعلومات حول المستشعر البصري، راجع مقالة مكتبة VEX هذه.
مستشعر نظام تحديد موضع اللعبة (GPS).
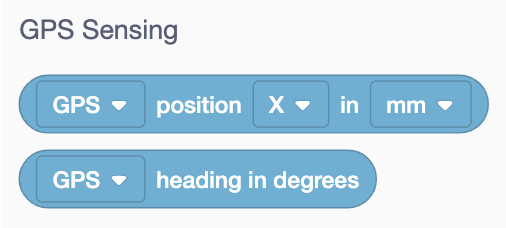
يستطيع مستشعر GPS الإبلاغ عن موضع X وY الحالي لمركز دوران الديسكو بالملليمتر أو البوصة.
يمكن لمستشعر GPS أيضًا الإبلاغ عن الاتجاه الحالي بالدرجات.
يقع مستشعر GPS بالقرب من الجزء الخلفي من Disco، ويستخدم لتحديد موضع الروبوت واتجاهه في الميدان من خلال قراءة شرائط رمز حقل GPS على طول المحيط الداخلي للميدان.
يمكنك استخدام مستشعر GPS لمساعدة Disco على التنقل في الميدان من خلال القيادة إلى مواقع محددة باستخدام معرفتك بنظام الإحداثيات الديكارتية.
باستخدام مستشعر GPS، يستطيع Disco القيادة على طول المحورين X أو Y حتى تصبح قيمة المستشعر أكبر من أو أقل من قيمة العتبة. يتيح ذلك لـ Disco القيادة باستخدام تعليقات المستشعر بدلاً من تحديد المسافات.
لمزيد من المعلومات حول تحديد تفاصيل الموقع في مهارات VRC الافتراضية باستخدام مستشعر GPS، راجع مقالة مكتبة VEX هذه.